Адаптивный круиз-контроль - принцип работы и применение
Статья обновлена: 01.03.2026
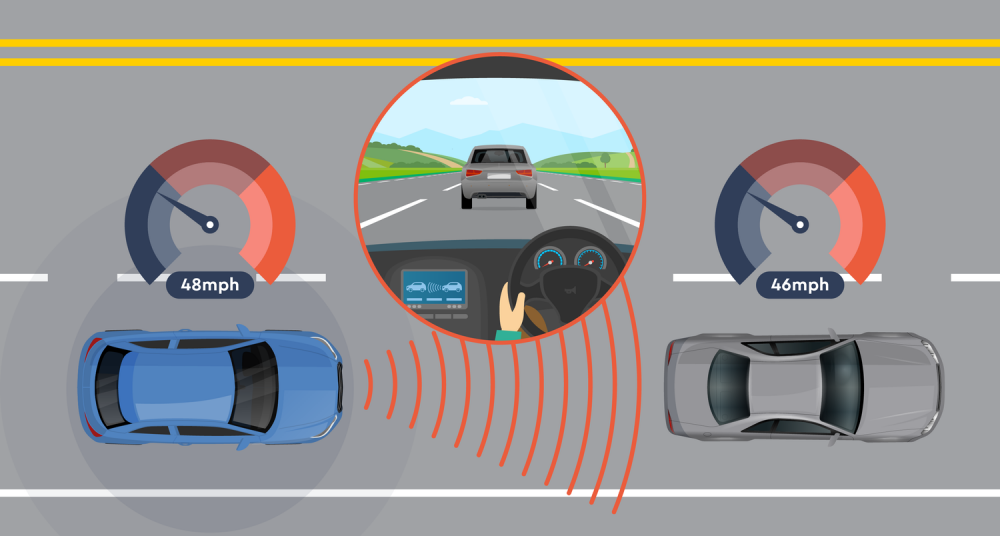
Современные автомобили оснащаются интеллектуальными системами помощи водителю, и адаптивный круиз-контроль (АСС) стал одним из ключевых элементов. Эта технология кардинально отличается от классического круиз-контроля, предлагая не просто поддержание скорости, а динамическую адаптацию к дорожной ситуации.
АСС непрерывно контролирует пространство перед автомобилем с помощью радаров, камер или лидаров. Система автоматически регулирует скорость машины, учитывая положение движущихся впереди объектов. Водитель задает желаемую скорость и дистанцию, а адаптивный круиз-контроль берет на себя управление акселератором и тормозами для соблюдения безопасного интервала.
Работа АСС основана на комплексном анализе данных от датчиков. Алгоритмы прогнозируют траекторию движения, вычисляют относительную скорость других участников движения и принимают решения о разгоне или замедлении. Это позволяет комфортно передвигаться в потоке, сокращая утомляемость водителя в долгих поездках.
Принципиальные отличия от классического круиз-контроля
Классический круиз-контроль поддерживает исключительно заданную водителем скорость, игнорируя окружающие транспортные средства. Водитель обязан самостоятельно контролировать дистанцию и вмешиваться при возникновении препятствий, используя тормоз или акселератор для коррекции движения.
Адаптивный круиз-контроль (ACC) дополняет базовую функцию интеллектуальными датчиками и алгоритмами автоматического регулирования скорости. Система непрерывно сканирует пространство перед автомобилем, анализируя дистанцию до впереди идущего транспорта и его скорость, что позволяет динамически адаптировать работу.
Ключевые функциональные различия
| Критерий | Классический круиз-контроль | Адаптивный круиз-контроль |
|---|---|---|
| Контроль дистанции | Не отслеживает расстояние до других ТС | Автоматически поддерживает безопасный интервал |
| Реакция на препятствия | Требует ручного торможения водителем | Самостоятельно снижает скорость или останавливает авто |
| Датчики | Использует только данные о скорости авто | Задействует радары/камеры для мониторинга дороги |
| Работа в потоке | Эффективен только на свободной трассе | Функционирует в плотном трафике и пробках |
Главный технологический разрыв заключается в способности ACC предвидеть сценарии благодаря трём компонентам:
- Радарному/лидарному сканированию дистанции до объектов
- Прогнозированию относительной скорости движения
- Интеграции с тормозной системой и дроссельной заслонкой
Базовые компоненты системы: датчики и управляющий блок
Сердцем адаптивного круиз-контроля (АСС) является комплекс датчиков, непрерывно сканирующих пространство перед автомобилем. Эти сенсоры определяют дистанцию до впереди идущих транспортных средств, их скорость и относительную динамику движения.
Обработкой данных с датчиков и принятием решений занимается электронный управляющий блок (ЭБУ). Этот модуль сопоставляет поступающую информацию с заданными водителем параметрами (желаемой скоростью, дистанцией следования) и вычисляет необходимые действия для поддержания безопасного движения.
Ключевые элементы системы
Типы датчиков:
- Радарные: Чаще всего устанавливаются в передний бампер или решетку радиатора. Используют радиоволны (обычно в диапазоне 76-77 ГГц) для точного измерения дистанции и относительной скорости объекта в любых погодных условиях.
- Лазерные (Lidar): Применяются реже из-за чувствительности к загрязнениям и плохой погоде. Определяют расстояние с помощью лазерных импульсов.
- Камеры: Моно- или стереокамеры, часто интегрированные в салонное зеркало. Распознают визуальные объекты (автомобили, пешеходы), дорожную разметку, помогают классифицировать цель.
Управляющий блок (ЭБУ):
- Анализирует в реальном времени поток данных от всех датчиков, фильтруя помехи и ложные срабатывания.
- Рассчитывает необходимую траекторию и требуемое ускорение/замедление для поддержания заданной дистанции.
- Отправляет команды на исполнительные устройства:
- Дроссельную заслонку или двигатель (для разгона)
- Тормозную систему (для замедления)
- Коробку передач (при необходимости переключения)
- Постоянно взаимодействует с другими системами автомобиля (ABS, ESP, системами помощи при торможении).
| Компонент | Основная функция | Особенности |
|---|---|---|
| Радарный датчик | Измерение дистанции и скорости | Высокая точность, устойчивость к погоде |
| Камера | Распознавание объектов и разметки | Позволяет классифицировать цели |
| Электронный блок управления (ЭБУ) | Обработка данных и управление | Интеграция с другими системами авто |
Радиолокационные датчики (радары) как основа АСС
Радиолокационные датчики служат ключевым сенсором адаптивного круиз-контроля (АСС), непрерывно сканируя пространство перед автомобилем. Они измеряют дистанцию до впереди идущего транспортного средства, определяют его скорость и вычисляют относительную скорость по сравнению с вашим автомобилем.
Принцип работы основан на излучении высокочастотных радиоволн (обычно в диапазоне 76-77 ГГц) и анализе сигнала, отраженного от объектов. По времени задержки возвращения сигнала рассчитывается расстояние, а по допплеровскому сдвигу частоты – относительная скорость сближения или удаления.
Основные функции радаров в АСС:
- Непрерывный мониторинг дистанции до лидирующего ТС.
- Точное измерение относительной скорости.
- Обнаружение объектов в заданном секторе перед автомобилем.
- Фильтрация ложных целей (дорожные знаки, ограждения).
Ключевые преимущества радиолокационных датчиков:
- Всепогодность: Стабильная работа в дождь, снег, туман, яркое солнце.
- Дальность действия: Покрытие зоны до 150-200 метров.
- Высокая точность: Погрешность измерения скорости ±0.1 км/ч, расстояния – менее 0.5 метра.
- Надежность: Минимальная подверженность внешним помехам.
| Характеристика | Типичное значение |
|---|---|
| Рабочая частота | 76-77 ГГц |
| Дальность обнаружения | 150-200 метров |
| Угол обзора по горизонтали | ±40-60 градусов |
| Точность измерения скорости | ±0.1 км/ч |
| Точность измерения расстояния | ≤ 0.5 метра |
Полученные радаром данные обрабатываются блоком управления АСС. Алгоритмы анализируют информацию, сопоставляют ее с заданной водителем скоростью и дистанцией, после чего формируют команды для исполнительных систем: плавно регулируют тягу двигателя или активируют тормоза для поддержания безопасного интервала.
Роль камеры в распознавании дорожной обстановки
Камера в системах адаптивного круиз-контроля (АСС) служит "зрительным сенсором", дополняющим радар. Она фиксирует визуальную информацию о дорожной сцене перед транспортным средством в реальном времени. Основываясь на захваченных изображениях или видеопотоке, система анализирует геометрию полос, положение объектов и дорожную разметку.
С помощью компьютерного зрения и алгоритмов машинного обучения камера идентифицирует ключевые элементы: тип и траекторию движения впереди идущих автомобилей, пешеходов, велосипедистов, а также дорожные знаки (особенно ограничения скорости). Это позволяет системе не только оценивать дистанцию до объектов, но и предсказывать их поведение и классифицировать потенциальные угрозы.
Ключевые функции камеры в АСС
- Распознавание дорожной разметки: Определение границ полосы движения для удержания автомобиля в заданном коридоре (в сочетании с функцией LKA).
- Классификация объектов: Различение между грузовиками, легковыми автомобилями, мотоциклами и уязвимыми участниками движения.
- Считывание дорожных знаков: Автоматическое обнаружение знаков ограничения скорости для адаптации заданной скорости круиз-контроля.
- Оценка траектории: Анализ вектора движения объектов для прогнозирования их положения и предотвращения столкновений.
Синергия с радаром критична: камера превосходит радар в распознавании статичных объектов (например, дорожных знаков) и определении формы препятствий, в то время как радар точнее измеряет дистанцию и относительную скорость, особенно в сложных погодных условиях. Совместная обработка данных (сенсорная фузия) создает более полную и надежную картину окружающей обстановки.
| Параметр | Камера | Радар |
|---|---|---|
| Основное назначение | Визуальная классификация, распознавание знаков/разметки | Точное измерение дистанции и скорости |
| Сильная сторона | Определение формы и типа объектов | Работа в тумане, дождь, ночь |
| Слабая сторона | Чувствительность к освещению, погоде, грязи | Ограниченная классификация объектов |
Камера обеспечивает контекстное понимание дороги, позволяя АСС не просто реагировать на динамику впереди идущего авто, но и учитывать дорожные правила (ограничения скорости) и потенциальные риски (пешеходы на обочине). Это фундамент для продвинутых функций вроде экстренного торможения или полуавтономного рулевого управления.
Ультразвуковые датчики и их дополнительные функции
Ультразвуковые датчики в адаптивном круиз-контроле работают на частотах 40-70 кГц, излучая звуковые волны и анализируя отраженный сигнал. Они эффективны на малых дистанциях (0.2-2.5 метра), что делает их незаменимыми для низкоскоростных сценариев. В отличие от радаров, ультразвук точно определяет габариты близкорасположенных объектов даже в условиях плохой видимости.
Хотя основная задача этих сенсоров – контроль дистанции при движении в пробках, их физические свойства позволяют выполнять смежные задачи. Модули интегрируются в бампера автомобиля по периметру, формируя 360-градусное покрытие. Это обеспечивает сбор данных не только для круиз-контроля, но и для других систем безопасности.
Ключевые дополнительные функции
- Парковочный ассистент: Автоматическое измерение расстояния до препятствий при маневрировании с визуальной/звуковой индикацией.
- Обнаружение "слепых зон": Мониторинг пространства позади и сбоку от автомобиля при перестроениях.
- Предупреждение о поперечном движении (Rear Cross Traffic Alert): Оповещение о машинах/пешеходах при движении задним ходом.
- Ассистент выезда с парковки: Автоматическое управление рулем при параллельной/перпендикулярной парковке.
| Характеристика | Радиолокационные датчики | Ультразвуковые датчики |
|---|---|---|
| Рабочая дистанция | До 200 метров | До 2.5 метров |
| Погодная устойчивость | Высокая | Средняя (чувствительны к грязи) |
| Точность определения объектов | Низкая (размер/форма) | Высокая |
Начало работы: включение адаптивного круиз-контроля
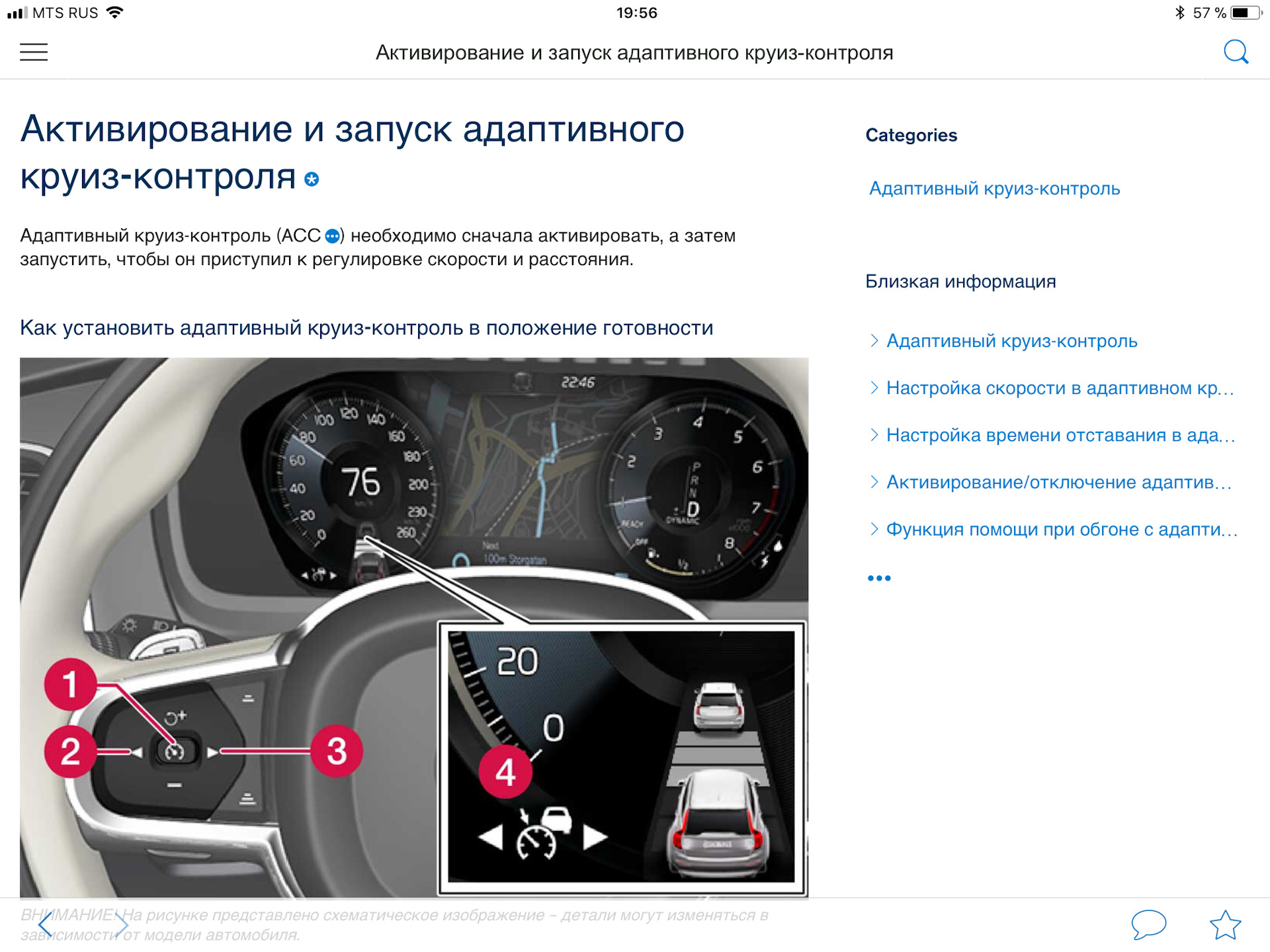
Активация системы начинается с нажатия основной кнопки круиз-контроля, обычно расположенной на рулевом колесе или подрулевом переключателе. Этот элемент обозначен пиктограммой спидометра со стрелкой или аббревиатурой "ACC". При включении на приборной панели загорается соответствующий белый или серый индикатор, сигнализирующий о переходе в режим ожидания команды.
Для установки желаемой скорости движения после активации системы разгонитесь до требуемого значения вручную. Нажмите кнопку "SET" или "SET-" на рулевом управлении – текущая скорость сохранится как целевая. На дисплее появится подтверждение установки значения, а индикатор системы сменит цвет на зеленый (или синий в зависимости от модели авто), что свидетельствует о переходе в активный режим сопровождения.
Ключевые параметры настройки
После запуска системы необходимо задать два критических параметра:
- Дистанция до впереди идущего ТС: регулируется отдельными кнопками (+/-) с шагом 1-4 уровня (в зависимости от производителя)
- Ограничение скорости: корректируется кнопками "RES+" или "SET-" во время движения
| Действие | Элемент управления | Индикация |
|---|---|---|
| Коррекция дистанции | Кнопки с пиктограммами машин | Шкала или сегменты на приборке |
| Изменение скорости | SET+/RES- | Цифровое значение скорости |
| Временное отключение | Тормоз или Cancel | Зеленый индикатор гаснет |
При кратковременном нажатии на педаль тормоза или кнопку отмены система переходит в пассивный режим с сохранением заданных параметров в памяти. Для полного выключения ACC требуется удержание специализированной кнопки в течение 2-3 секунд – при этом пропадает соответствующая индикация на приборной панели.
Задание желаемой скорости движения водителем
Водитель активирует систему адаптивного круиз-контроля (АСС) с помощью мультифункционального рулевого колеса или отдельного подрулевого переключателя. После включения АСС требуется ручной ввод целевого значения скорости, соответствующего текущим дорожным условиям и разрешенным ограничениям. Для этого используются кнопки "+" (увеличение) и "–" (уменьшение), позволяющие устанавливать скорость с шагом, обычно равным 1 или 5 км/ч.
Выбранное значение мгновенно отображается на приборной панели или проекционном дисплее. Система запоминает установленную скорость даже после полной остановки автомобиля (например, в пробке) или временного отключения. При необходимости водитель может быстро переопределить настройки: кратковременное нажатие на педаль акселератора позволяет временно превысить заданный лимит, а нажатие тормоза или кнопки отмены полностью деактивирует АСС до следующего ручного запуска.
Ключевые особенности настройки скорости
- Минимальная скорость активации: системы АСС требуют движения на скорости от 30-40 км/ч для старта
- Автоматическое ограничение: при распознавании дорожных знаков камерой АСС может предлагать снизить установленную скорость
- Корректировка в движении: изменение скорости возможно без отключения системы
| Действие водителя | Реакция системы АСС |
|---|---|
| Краткое нажатие "+RES" | Увеличение скорости на 1 км/ч |
| Длительное удержание "+RES" | Плавный разгон до следующего значения с шагом 5-10 км/ч |
| Нажатие "SET–" | Снижение скорости или фиксация текущего показателя |
| Нажатие тормоза | Временное отключение с сохранением заданного значения в памяти |
Установка безопасной дистанции до впереди идущего авто
Водитель задаёт предпочтительную дистанцию через кнопки на рулевом колесе или панели управления. Система предлагает несколько уровней удалённости (обычно 3-5 ступеней), отображаемых графически на приборной панели в виде полос или секунд. Выбор зависит от скорости движения: на 90 км/ч минимальная ступень соответствует ~30 метрам, максимальная – ~70 метрам.
Электроника непрерывно вычисляет дистанцию с помощью радара и камеры, сравнивая реальное расстояние с заданным эталоном. При сокращении промежутка система плавно снижает скорость двигателем или тормозами. Если впереди идущее авто ускоряется или меняет полосу – АКК возвращает заданную скорость. Дистанция динамически корректируется с учётом текущей скорости: на 50 км/ч выбранная ступень обеспечит меньший метраж, чем на 120 км/ч.
Ключевые аспекты настройки
- Рекомендуемый минимум: 2-3 секунды до объекта (ступень 2-3 из 5). На мокром асфальте или в туман увеличивайте до 4-5.
- Автоматическая калибровка: При резком торможении "лидера" система временно сокращает дистанцию для избежания столкновения, затем восстанавливает заданный интервал.
- Ограничения: На ступени "1" дистанция может быть недостаточной для экстренного манёвра – используйте только на свободных трассах.
| Ступень дистанции | Примерный интервал на 100 км/ч | Рекомендуемые условия |
|---|---|---|
| 1 (короткая) | ~25 метров | Лёгкий трафик, сухой асфальт |
| 2-3 (средняя) | ~35-50 метров | Стандартная эксплуатация |
| 4-5 (длинная) | ~60-80 метров | Дождь, гололёд, плотное движение |
Важно: Система не учитывает экстремальные ситуации (резкие перестроения, вылетающие препятствия). Всегда держите руки на руле и будьте готовы взять управление на себя.
Автоматическое поддержание заданной скорости на трассе
Система фиксирует выбранную водителем скорость, непрерывно регулируя мощность двигателя и при необходимости задействуя тормоза. Электронный блок управления (ЭБУ) сопоставляет текущую скорость автомобиля с целевым значением через показания датчиков колес и другие источники данных.
При движении под уклон система автоматически снижает тягу или активирует торможение для предотвращения разгона. На подъемах круиз-контроль увеличивает подачу топлива, чтобы преодолеть возросшее сопротивление без потери заданного скоростного режима. Корректировки происходят плавно, обеспечивая стабильность движения.
Ключевые особенности работы
Основные компоненты, задействованные в процессе:
- Датчики скорости вращения колес
- Электронная педаль акселератора
- Блок управления двигателем (ECU)
- Каналы связи с трансмиссией и тормозной системой
Алгоритм реагирования на изменение дорожных условий включает три этапа:
- Мониторинг скорости с частотой до 100 раз в секунду
- Расчет отклонения от заданного значения
- Корректирующее воздействие через дроссельную заслонку/тормоза
| Ситуация | Действие системы |
| Снижение уклона | Постепенное уменьшение подачи топлива |
| Увеличение уклона | Плавное открытие дросселя |
| Резкий подъем | Короткое переключение на пониженную передачу |
Точность поддержания скорости в современных системах достигает ±1 км/ч даже при перепадах высот. Функция сохраняет работоспособность во всем диапазоне скоростей – от 30 км/ч в пробках до максимально разрешенных значений на трассе.
Алгоритм замедления при обнаружении медленного ТС
При фиксации радаром или камерой более медленного транспортного средства в полосе движения система активирует протокол замедления. Электронный блок управления (ЭБУ) непрерывно вычисляет разницу скоростей между автомобилями и дистанцию до цели, используя данные датчиков.
На основе этих параметров алгоритм прогнозирует время до потенциального столкновения (Time-To-Collision). Если значение TTC опускается ниже безопасного порога, система инициирует плавное снижение скорости. Величина замедления рассчитывается с учетом текущей скорости, дорожного покрытия и заданного пользователем интервала следования.
Принципы работы алгоритма торможения
Основные этапы коррекции скорости:
- Оценка угрозы: Датчики определяют скорость объекта, дистанцию и траекторию. Исключаются статичные препятствия (отбойники, знаки).
- Расчет динамических параметров:
- Требуемое замедление: a = (Vотн2) / (2 × D) (где Vотн – разность скоростей, D – дистанция)
- Корректировка с коэффициентом безопасности (обычно 1.2–1.5)
- Выбор метода замедления:
Сценарий Действие системы Незначительное превышение скорости Сброс газа + коррекция дросселя Средняя разность скоростей (10-30 км/ч) Притормаживание двигателем + мягкое задействование тормозов Экстренное сближение (>30 км/ч) Автоматическое торможение с усилием до 0.3g
Критический аспект: алгоритм всегда сохраняет возможность мгновенного отключения при нажатии педали тормоза или акселератора водителем. При возобновлении свободной полосы система автоматически возвращает заданную скорость без вмешательства пользователя.
Беспрерывное сканирование дороги впереди автомобиля
Основу работы системы составляет постоянный мониторинг пространства перед транспортным средством с помощью радара и/или камеры, установленных за лобовым стеклом или в решётке радиатора. Эти датчики анализируют дистанцию до впереди идущего автомобиля, его скорость и траекторию движения с частотой обновления до 100 раз в секунду.
Полученные данные в реальном времени обрабатываются электронным блоком управления (ЭБУ), который вычисляет относительную скорость объектов и прогнозирует потенциальные риски столкновения. ЭБУ непрерывно корректирует ускорение и торможение, опираясь на заданную водителем дистанцию, а также ограничения скорости, полученные через навигационную систему или распознавание дорожных знаков.
Ключевые компоненты сканирования
- Радарный датчик: Излучает радиоволны для точного измерения дистанции и скорости в любых погодных условиях.
- Моно/стереокамера: Распознаёт тип объектов (автомобили, мотоциклы), считывает дорожную разметку и знаки.
- Ультразвуковые сенсоры: Контролируют ближнюю зону при медленном движении.
| Параметр сканирования | Характеристики |
|---|---|
| Диапазон действия | До 200 метров для радара, до 100 метров для камеры |
| Угол обзора | До 40° по горизонтали |
| Реакция на помехи | Фильтрация статичных объектов (знаки, ограждения) |
При обнаружении замедления впереди идущего ТС система плавно снижает скорость автомобиля за счёт дросселирования или активации тормозов. Если препятствие исчезает (например, машина перестраивается), круиз-контроль автоматически возвращает заданную скорость. В случае резкого изменения дорожной обстановки (экстренное торможение «лидера»), водитель получает визуальные и звуковые предупреждения.
Важно: Эффективность сканирования снижается в сильный дождь, снегопад или при загрязнении датчиков. Современные системы дублируют функции радара и камеры для повышения надёжности, а также интегрируются с картографическими данными для учёта рельефа местности.
Плавное возобновление движения после остановки
При кратковременных остановках (например, в пробке) система АСС сохраняет готовность к автоматическому возобновлению движения без участия водителя. Для активации функции достаточно кратковременного нажатия на педаль газа или кнопку возобновления на руле, после чего автомобиль плавно тронется с места.
Система анализирует дистанцию до впереди идущего ТС с помощью радара или камеры, рассчитывая оптимальное ускорение для плавного старта. Ускорение ограничивается безопасными параметрами, исключая резкие рывки, а электроника координирует работу двигателя и тормозов для равномерного набора скорости.
Ключевые особенности работы
Условия срабатывания:
- Остановка длится не более 2-3 секунд (зависит от модели авто)
- Впереди идущее ТС начало движение
- Водитель пристегнут, а двери закрыты
Алгоритм безопасности:
- Контроль дистанции при старте с точностью до 0.1 м
- Автоматическая отмена старта при резком торможении впереди идущего авто
- Переход в режим ожидания при бездействии водителя более 5 секунд
| Ситуация | Действие системы |
|---|---|
| Препятствие исчезло | Плавный разгон до заданной скорости |
| Препятствие осталось | Продолжение остановки с звуковым оповещением |
| Резкое перестроение авто спереди | Корректировка ускорения по новому объекту |
Важно: При длительных остановках (свыше 3 сек) большинство систем требуют повторного нажатия кнопки RESUME или педали газа для предотвращения случайного старта.
Работа системы в условиях пробок (Stop & Go)
Адаптивный круиз-контроль с функцией Stop & Go специально разработан для комфортного и безопасного движения в плотном транспортном потоке с частыми остановками. Система автоматически поддерживает заданную дистанцию до впереди идущего автомобиля, полностью останавливая машину при необходимости и возобновляя движение без вмешательства водителя.
При активации режима в пробке система использует радарные датчики и фронтальную камеру для непрерывного мониторинга пространства перед автомобилем. Если поток замедляется или останавливается, ACC последовательно снижает скорость вплоть до полной остановки (обычно до 0 км/ч), удерживая тормоза после остановки. Для возобновления движения водителю достаточно кратковременно нажать педаль газа или кнопку возобновления на руле – система снова возьмет управление скоростью на себя.
Ключевые особенности работы в режиме Stop & Go
- Автоматический старт после короткой остановки (до 3-5 секунд): Система возобновляет движение самостоятельно при трогании впереди идущего автомобиля.
- Продленная удержка тормозов: При остановке свыше 5 секунд задействуется функция Auto Hold – для старта требуется нажатие педали газа.
- Динамическое регулирование дистанции: Интервал до впереди идущего ТС автоматически корректируется в зависимости от скорости (1-4 корпуса автомобиля).
| Состояние потока | Действие системы | Ограничения |
|---|---|---|
| Плавное замедление | Плавное торможение двигателем и фрикционными тормозами | Требует внимания водителя при резких перестроениях |
| Полная остановка | Активация удержания тормозов (Auto Hold) | |
| Трогание с места | Автоматический разгон до установленной скорости/дистанции | Не реагирует на светофоры или знаки STOP |
Важно: Система деактивируется при длительном простое (свыше 3 минут у большинства моделей) или открытии двери водителя. Требует постоянного контроля дорожной обстановки – она не распознает пешеходов, велосипедистов или внезапные препятствия.
Ограничения в распознавании в сильный дождь или снег

Сильные осадки создают физические помехи для датчиков системы. Капли дождя или снежинки отражают и рассеивают лазерные лучи лидаров и радиоволны радаров, генерируя "шум" на сенсорах. Это приводит к частичной или полной потере способности определять дистанцию до впереди идущих транспортных средств, а также корректно оценивать их скорость.
Видимость для камеры также критически ухудшается: водяные потоки на стекле, ледяная корка или плотная завеса снега делают изображение нечитаемым для алгоритмов компьютерного зрения. Система не может выделить контуры автомобилей, дорожную разметку или знаки, что парализует функции поддержания полосы и экстренного торможения.
Основные риски при эксплуатации в осадках
- Ложные срабатывания тормозов из-за ошибочного обнаружения "фантомных" объектов в дождевой завесе
- Запаздывание реакции на реальные препятствия при резком ухудшении погодных условий
- Некорректное определение дистанции, вызванное отражением сигналов от капель воды
Производители указывают в руководствах необходимость ручного отключения ACC при сильных осадках. Современные системы предупреждают водителя сообщением "Ограниченная функциональность" или "Датчики заблокированы" на приборной панели, после чего требуется полный переход на ручное управление.
Сложности при езде в крутых поворотах
Основная проблема адаптивного круиз-контроля (АСС) в крутых поворотах связана с ограничениями радара и камер. Датчики имеют узкий угол обзора, из-за чего система может временно терять из виду транспортное средство, движущееся впереди по смежной полосе. Это приводит к ложному определению свободного пути и нежелательному ускорению.
Дополнительную сложность создаёт физика движения: в резком повороте автомобиль с АСС может смещаться внутри полосы, изменяя угол обнаружения впереди идущего транспорта. Система также испытывает трудности с прогнозированием траектории встречных машин на серпантинах, что повышает риск ошибочного срабатывания тормозов или, наоборот, запоздалой реакции.
Ключевые риски и ограничения
- Слепые зоны датчиков: Радар не отслеживает объекты под острыми углами, а камера теряет цель при сильном наклоне кузова
- Ошибки идентификации: Автомобиль впереди может быть ошибочно классифицирован как неподвижное препятствие
- Задержки реакции: Необходимость перерасчета дистанции при повторном обнаружении ТС после выхода из поворота
| Ситуация | Последствие для АСС | Рекомендации водителю |
|---|---|---|
| Крутой поворот с визуальными помехами (стены, ограждения) | Ложное срабатывание экстренного торможения | Снижать скорость вручную перед входом в поворот |
| Серпантин со встречным транспортом | Неверный расчёт дистанции до встречных машин | Держать руки на руле для быстрого вмешательства |
Взаимодействие АСС с системой экстренного торможения
Адаптивный круиз-контроль (АСС) тесно интегрирован с системой экстренного торможения (например, Automatic Emergency Braking – AEB) для предотвращения столкновений. При обнаружении препятствия впереди, АСС сначала плавно снижает скорость двигателем или мягким торможением, поддерживая заданную дистанцию. Если этого недостаточно и риск удара становится критическим (например, водитель не реагирует), система передает данные модулю AEB для немедленного вмешательства.
Система экстренного торможения использует информацию от тех же датчиков, что и АСС (радары, камеры, лидары), анализируя скорость сближения и расстояние до объекта. AEB активирует тормоза на полную мощность, когда столкновение оценивается как неизбежное, либо полностью останавливая автомобиль, либо минимизируя последствия удара. При этом АСС временно отключается до возобновления движения.
Ключевые аспекты совместной работы
Функционирование связки АСС-AEB основано на:
- Единой сенсорной сети: Радар отслеживает дистанцию и скорость, камера классифицирует объекты (автомобиль, пешеход).
- Иерархии действий:
- Предупреждение водителя (звук/вибрация)
- Автономное частичное торможение АСС
- Экстренное полное торможение AEB
- Динамическом управлении: AEB перехватывает управление тормозами при бездействии водителя.
Важно: АСС не заменяет бдительность водителя. Системы эффективны в четких дорожных условиях, но могут не распознать внезапные препятствия (например, выезд машины сбоку).
| Этап реакции | Действие АСС | Действие AEB |
|---|---|---|
| Обнаружение угрозы | Плавное снижение скорости | Мониторинг ситуации |
| Высокий риск столкновения | Интенсивное торможение | Подготовка к активации |
| Критическая ситуация | Отключение | Максимальное торможение |
Функция предупреждения о лобовом столкновении
Система использует радарные датчики и камеры для непрерывного анализа расстояния до впереди идущего автомобиля и относительной скорости сближения. При выявлении опасной дистанции, способной привести к столкновению в течение заданного временного интервала (например, менее 2 секунд), активируется многоуровневое оповещение водителя.
Первичное предупреждение обычно представляет собой визуальный сигнал на приборной панели или проекцию на лобовое стекло (Head-Up Display). Если реакция водителя отсутствует, система дополняет его звуковыми импульсами или вибрацией рулевого колеса/сиденья. В критических ситуациях выполняется кратковременное автоматическое торможение для сокращения скорости удара.
Ключевые компоненты системы
- Радар/лидар: Точно измеряет дистанцию и скорость объекта впереди (дальность до 200 м)
- Моно/стереокамеры: Распознают тип препятствия (автомобиль, пешеход, велосипед)
- Электронный блок управления (ЭБУ): Анализирует данные в реальном времени, прогнозирует траектории
- Актуаторы: Обеспечивают вибро/звуковые сигналы и превентивное торможение
Эффективность работы напрямую зависит от корректности калибровки датчиков и чистоты сенсоров. Система деактивируется при экстремальных погодных условиях (сильный дождь, снегопад) или при механических повреждениях зоны установки камеры/радара.
| Стадия угрозы | Действия системы | Цель |
|---|---|---|
| Потенциальная опасность | Желтый значок на панели | Превентивное информирование |
| Критическое сближение | Красный значок + звук | Немедленное привлечение внимания |
| Иммненное столкновение | Вибрация + экстренное торможение | Снижение тяжести удара |
Важно понимать, что система является ассистентом, а не заменой водителя. Она не компенсирует невнимательность или нарушение ПДД, а лишь предоставляет дополнительный временной запас для реакции. Ручное управление всегда имеет приоритет над автоматическими функциями.
Связь с камерой и датчиками для отслеживания разметки

Видеокамера, установленная за лобовым стеклом, непрерывно анализирует дорожное полотно, идентифицируя линии разметки с помощью алгоритмов компьютерного зрения. Она определяет тип линий (сплошная, прерывистая), их цвет и относительное положение автомобиля в полосе, вычисляя углы отклонения от оптимальной траектории.
Полученные данные камеры интегрируются с информацией от радаров и ультразвуковых сенсоров, создавая комплексную модель дорожной обстановки. Электронный блок управления (ЭБУ) сопоставляет координаты разметки с дистанцией до впереди идущих машин, что позволяет системе предсказывать кривизну дороги и корректировать траекторию движения.
Принципы совместной работы с ACC
- Стабилизация в полосе: Данные о разметке используются для плавного подруливания, предотвращая пересечение линий без включения поворотника
- Корректировка скорости: При обнаружении крутых поворотов ACC автоматически снижает скорость до безопасного значения
- Аварийное реагирование: При резком смещении соседних транспортных средств система готовится к экстренному торможению
| Датчик | Функция в отслеживании разметки | Точность измерений |
| Моно/стереокамера | Распознавание геометрии линий, цвета разметки, знаков | ±5 см (в оптимальных условиях) |
| Фронтальный радар | Определение дистанции до объектов при смене полосы | ±0.1 м на 100 м |
| Ультразвуковые сенсоры | Контроль "слепых зон" во время маневрирования | До 5 м |
Важнейшим аспектом является калибровка сенсоров: даже незначительное смещение камеры на 0.5° вызывает погрешность позиционирования до 30 см на дистанции 100 м. Современные системы используют дублирующие алгоритмы распознавания, сохраняя функциональность при временном ухудшении видимости разметки (снег, стертые линии) за счет анализа дорожного полотна и поведения впереди идущего транспорта.
Настройка чувствительности системы под стиль вождения
Адаптивный круиз-контроль предлагает гибкую кастомизацию параметров реакции для соответствия индивидуальным предпочтениям водителя. Ключевые регулируемые аспекты включают дистанцию до впереди идущего транспорта, интенсивность разгона и резкость торможения. Эти настройки напрямую влияют на агрессивность или плавность работы системы.
Управление параметрами осуществляется через мультимедийный экран или кнопки на рулевом колесе. Производители обычно предусматривают несколько предустановленных профилей («Спорт», «Комфорт», «Эко»), а также ручную тонкую настройку каждого параметра. Выбор оптимальной конфигурации зависит от дорожных условий, скорости движения и личных привычек водителя.
Основные регулируемые параметры:
- Дистанция следования – выбор интервала до впереди идущего ТС (обычно 1-4 секунды);
- Агрессивность ускорения – скорость набора скорости после возобновления движения;
- Интенсивность торможения – резкость замедления при обнаружении препятствия;
- Реакция на перестроения – чувствительность к автомобилям, меняющим полосу перед вами.
Рекомендуемые настройки для разных стилей:
| Стиль вождения | Дистанция | Ускорение | Торможение |
|---|---|---|---|
| Спортивный | Минимальная | Максимальное | Позднее резкое |
| Комфортный | Средняя | Плавное | Заблаговременное |
| Экономичный | Увеличенная | Минимальное | Плавное |
Влияние АСС на усталость водителя в дальних поездках
Адаптивный круиз-контроль (АСС) существенно влияет на уровень усталости водителя во время длительных путешествий, прежде всего, за счет снижения постоянной физической и когнитивной нагрузки. Система автоматически поддерживает заданную скорость и безопасную дистанцию до впереди идущего автомобиля, избавляя водителя от необходимости непрерывно работать педалями газа и тормоза в условиях переменного потока. Это уменьшает мышечное напряжение в ногах и спине, а также снижает стресс, связанный с необходимостью точного контроля дистанции и скорости на протяжении многих часов.
Однако влияние АСС неоднозначно. Снижение активного вовлечения в процесс управления может привести к монотонности и снижению уровня бдительности. Водитель, освобожденный от рутинных задач, рискует перейти в пассивное состояние, что способствует сонливости и замедлению реакции в случае внезапной, нештатной ситуации, которую система не способна обработать самостоятельно. Возникает парадокс: уменьшая физическую усталость, АСС может косвенно способствовать накоплению усталости ментальной из-за снижения стимуляции.
Преимущества АСС в борьбе с усталостью
- Снижение физической нагрузки: Автоматизация поддержания скорости и дистанции минимизирует работу ног и постоянные мелкие коррекции руля.
- Уменьшение когнитивной нагрузки: Водителю не нужно постоянно анализировать дистанцию и рассчитывать необходимые корректировки скорости в плотном потоке.
- Снижение стресса: Система обеспечивает более плавное движение, уменьшая количество резких маневров и связанное с ними нервное напряжение.
Потенциальные риски и недостатки
- Риск монотонности и снижения бдительности: Чрезмерное доверие системе и отсутствие активных задач может привести к потере концентрации и сонливости.
- Комплаенс-эффект (Complacency): Водитель может стать излишне самоуверенным в возможностях системы и перестать адекватно контролировать дорожную обстановку.
- Замедление реакции: При неожиданном событии (например, резкое торможение через два автомобиля вперед или внезапное перестроение "подрезающего") водителю, находившемуся в пассивном состоянии, может потребоваться больше времени на оценку ситуации и принятие мер.
| Фактор | Влияние на усталость | Рекомендации для водителя |
|---|---|---|
| Автоматизация поддержания дистанции/скорости | Значительно снижает физическую и когнитивную нагрузку | Использовать АСС на трассах с постоянным, но не слишком плотным потоком |
| Снижение активного управления | Повышает риск монотонности и потери концентрации | Сохранять активное внимание, сканировать дорогу, избегать длительного "выключения" из процесса |
| Ограниченность возможностей АСС | Неожиданное отключение или сложная ситуация может вызвать стресс | Всегда быть готовым немедленно взять управление на себя, понимать ограничения системы |
Таким образом, АСС является эффективным инструментом для снижения физической усталости в дальних поездках, но его использование требует от водителя осознанного подхода. Ключ к безопасности – активное поддержание внимания и готовность моментально вмешаться в управление, несмотря на помощь автоматики. Система должна облегчать управление, а не заменять водителя.
Возможное воздействие на расход топлива
Адаптивный круиз-контроль способен оптимизировать расход топлива за счёт поддержания равномерной скорости движения и расчётного дистанцирования. Система минимизирует резкие ускорения и торможения, характерные для ручного управления в плотном потоке.
Электроника анализирует дорожную обстановку и выбирает экономичный режим работы двигателя, плавно регулируя подачу топлива при изменении условий. Это особенно эффективно на трассах с предсказуемым трафиком, где исключаются частые перестроения.
Факторы влияния
Снижение расхода:
- Плавные ускорения при старте и наборе скорости
- Автоматическое торможение двигателем при замедлении
- Поддержание постоянной скорости на спусках/подъёмах
- Оптимальная дистанция, снижающая аэродинамическое сопротивление
Потенциальное увеличение расхода:
- Активная работа в пробках с частыми циклами разгона-торможения
- Избыточное ускорение при агрессивных настройках системы
- Энергопотребление датчиков и вычислительных модулей
| Сценарий | Влияние на топливо |
|---|---|
| Движение по трассе | Экономия до 5-7% |
| Городской режим с пробками | Нейтральное или отрицательное |
| Холмистая местность | Экономия за счёт прогнозирования рельефа |
Эффективность системы напрямую зависит от алгоритмов производителя и стиля вождения, который она замещает. При замене импульсивного управления на расчётливое авторегулирование экономия становится наиболее заметной.
Распространенные ошибки пользователей адаптивного круиз-контроля
Многие водители ошибочно полагают, что система способна полностью взять на себя управление автомобилем, игнорируя необходимость постоянного контроля дорожной обстановки. Это приводит к опасным ситуациям, когда водитель не готов своевременно вмешаться в работу системы при возникновении нештатного сценария.
Непонимание рабочих ограничений адаптивного круиз-контроля в сложных погодных условиях – еще одна частая проблема. Пользователи забывают, что сильный дождь, снегопад, туман или загрязнение датчиков радиолокатора/камеры критически снижают точность обнаружения препятствий и дистанцию срабатывания.
Типичные ошибки при эксплуатации
- Неправильный выбор дистанции: Установка минимальной дистанции следования в плотном потоке или на высокой скорости, не оставляющей достаточного запаса времени для реакции системы на резкое торможение впередиидущего транспорта.
- Игнорирование "слепых зон" системы: Попытки использовать АСС на крутых поворотах, при резкой смене полосы движения или при появлении препятствий сбоку (пешеходы, велосипедисты, машины, "подрезающие" ряд).
- Отсутствие ручного торможения в экстренных случаях: Запоздалое или полное отсутствие реакции водителя при внезапном появлении неподвижных объектов (ДТП, дорожные работы, остановившийся транспорт), которые система может не распознать как угрозу.
| Ошибка | Риск | Рекомендация |
|---|---|---|
| Использование с изношенными щетками/грязным лобовым стеклом | Сбой работы камеры, потеря видимости | Регулярно чистить стекло и проверять состояние щеток |
| Включение системы в пробках без готовности к ручному управлению | Система может не успеть среагировать на резкие маневры | Держать ногу над педалью тормоза, быть готовым к перехвату контроля |
| Доверие системе на дорогах со сложной разметкой | Непредсказуемое поведение (съезд с полосы) | Отключать АСС при плохой видимости разметки или ее отсутствии |
- Невыполнение проверки состояния датчиков: Перед поездкой необходимо убедиться в чистоте радара (обычно за решеткой радиатора) и области лобового стекла перед камерой. Грязь, снег или лед блокируют их работу.
- Использование при нештатных маневрах: Попытки активировать или оставлять систему включенной при обгонах, перестроениях в плотном потоке или проезде перекрестков повышают аварийность.
- Пренебрежение погодным фактором: Продолжение использования АСС при ухудшении видимости или сцепления с дорогой (гололед, аквапланирование), когда система не может адекватно оценить тормозной путь.
Калибровка датчиков после ремонта или замены
После замены лобового стекла, ремонта бампера или демонтажа радаров/камер адаптивного круиз-контроля (АСС) требуется обязательная калибровка сенсоров. Физическое смещение даже на несколько миллиметров искажает углы обзора и расчет дистанции, что приводит к некорректной работе системы: ложным срабатываниям торможения, игнорированию препятствий или ошибочному определению скорости впереди идущего автомобиля.
Калибровка выполняется при помощи специализированного оборудования: оптических мишеней, калибровочных стендов и диагностических сканеров. Процедура включает программную настройку и физическое выравнивание датчиков относительно продольной оси автомобиля. Для камеры обязательна чистота лобового стекла в зоне ее обзора, а для радара – отсутствие загрязнений на излучающей поверхности.
Этапы процедуры калибровки

- Предварительные условия: давление в шинах по норме, полная заправка, отсутствие груза в салоне
- Установка автомобиля: на ровной площадке с точной горизонтальностью (проверяется уровнемером)
- Позиционирование мишеней: размещение калибровочных схем на строго заданном расстоянии от сенсоров
- Аппаратная синхронизация: подключение сканера к бортовой сети и считывание данных с блоков управления
- Коррекция параметров: автоматическая настройка угла наклона, фокуса и зоны покрытия датчиков
Важно: Невыполнение калибровки или использование неквалифицированными сервисами может привести к деактивации АСС, ошибкам в работе экстренного торможения (AEB) и аннулированию гарантии на систему.
Техобслуживание радаров и камер: чистка и диагностика
Чистота сенсоров – критически важный фактор для корректной работы адаптивного круиз-контроля (ACC) и связанных с ним систем безопасности. Радарный модуль (обычно расположенный за эмблемой радиатора или в переднем бампере) и камера (установленная за лобовым стеклом возле зеркала заднего вида) постоянно подвергаются воздействию грязи, пыли, воды, снега, льда, насекомых и дорожных реагентов. Даже тонкий слой грязи или плёнка на лобовом стекле перед камерой могут значительно ухудшить или полностью заблокировать их способность точно измерять дистанцию, распознавать объекты и считывать дорожную разметку.
Регулярная и правильная чистка сенсоров – обязательная часть обслуживания автомобиля, оснащенного ACC. Игнорирование этого может привести к ложным срабатываниям системы, её неожиданному отключению или, что хуже, к некорректной работе в критической ситуации. Кроме чистки, периодическая профессиональная диагностика состояния и калибровки сенсоров необходима для поддержания их точности и надежности, особенно после определенных событий.
Правила чистки и диагностики
Чистка сенсоров:
- Радар: Осторожно протрите защитный пластиковый кожух радара мягкой, чистой, безворсовой салфеткой или губкой, смоченной водой или специальным средством для чистки автомобильного пластика. Избегайте абразивных материалов, агрессивных растворителей и сильного нажима.
- Камера и лобовое стекло: Тщательно очистите область лобового стекла перед камерой (как снаружи, так и изнутри) с помощью качественного стеклоочистителя и чистой микрофибры. Убедитесь, что на стекле не осталось разводов или плёнки, ухудшающей видимость камеры. Следите за чистотой защитного кожуха самой камеры.
- Запрещено: Использовать мойки высокого давления непосредственно на радарный модуль. Применять воски, полироли или силиконовые составы на область радара или перед камерой. Пытаться разбирать или механически воздействовать на сенсоры.
Диагностика и калибровка:
- Самодиагностика: Современные системы ACC обычно имеют встроенную диагностику. При обнаружении неисправности или сильном загрязнении сенсора на приборной панели загорится соответствующий предупреждающий значок (часто желтый или оранжевый) и появится сообщение (например, "ACC недоступен", "Очистите датчик радара", "Очистите лобовое стекло перед камерой").
- Профессиональная диагностика: При появлении ошибок, после снятия/установки сенсоров (например, при ремонте бампера или замене лобового стекла), после ДТП с повреждением передней части автомобиля обязательна диагностика с помощью специализированного сканера на сервисе. Сканер считывает точные коды неисправностей системы.
- Калибровка: Во многих случаях после снятия/установки радара или камеры, замены лобового стекла или определенных ремонтов требуется их точная электронная калибровка. Это сложная процедура, выполняемая квалифицированными техниками с использованием специальных мишеней, стендов и программного обеспечения в условиях автосервиса. Неправильная калибровка сделает работу ACC неэффективной или опасной.
| Тип обслуживания | Частота / Триггер | Кто выполняет |
|---|---|---|
| Визуальный осмотр и чистка радара/камеры/стекла | При каждой мойке автомобиля, после поездок в сложных условиях (грязь, снег, насекомые) | Владелец автомобиля |
| Диагностика сканером при ошибках системы | При появлении предупреждений на панели приборов | Сервисный центр |
| Диагностика и калибровка сенсоров | После ремонтов, связанных с демонтажем сенсоров или передней части авто, замены лобового стекла, ДТП | Авторизованный сервисный центр (требуется спецоборудование) |
Регулярное внимание к чистоте сенсоров и своевременная профессиональная диагностика при возникновении проблем – залог долгой и безотказной работы адаптивного круиз-контроля, обеспечивающей комфорт и безопасность на дороге.
Прогнозирование траектории движения впереди идущих авто
Система адаптивного круиз-контроля непрерывно анализирует положение и динамику впереди движущегося транспортного средства с помощью радаров, камер и лидаров. Датчики отслеживают не только текущее расстояние и скорость объекта, но и его перемещение относительно полосы движения. Это позволяет определить вектор движения автомобиля-лидера и спрогнозировать его краткосрочную траекторию с высокой точностью.
На основе полученных данных алгоритмы машинного обучения сопоставляют поведение цели с типовыми сценариями: движение по прямой, плавные повороты, перестроения или экстренные манёвры. Система учитывает кривизну дороги, угловую скорость колёс лидирующего авто и внешние факторы (погоду, состояние покрытия). Прогноз обновляется до 100 раз в секунду, формируя вероятностную модель будущего положения объекта.
Ключевые аспекты алгоритмов прогнозирования
- Фильтрация Калмана – устраняет шумы измерений и корректирует предсказания на основе новых данных с датчиков
- Моделирование физики движения – расчёт ускорения, рыскания и углового смещения с учётом динамических параметров
- Анализ паттернов вождения – распознавание агрессивных/спокойных манёвров по истории изменения скорости и траектории
| Параметр отслеживания | Влияние на прогноз | Точность измерения |
|---|---|---|
| Угол поворота руля | Определяет кривизну траектории в повороте | ±1.5° |
| Поперечное ускорение | Указывает на начало манёвра перестроения | ±0.05 м/с² |
| Скорость изменения дистанции | Позволяет предсказать торможение/разгон | ±0.2 км/ч/с |
При расчёте безопасной дистанции система экстраполирует позицию цели на 2-5 секунд вперёд, корректируя прогноз при обнаружении аномалий – например, резкого отклонения от полосы или неожиданного торможения. Современные реализации используют нейросетевые модели, обученные на миллионах километров реальных дорожных сценариев, что снижает ошибки предсказания до 0.3 метра на горизонте 3 секунды.
Интеграция с навигационной системой для адаптации к дороге
Современные адаптивные круиз-контроли (ACC) всё чаще синхронизируются с GPS-навигацией и цифровыми картами. Система анализирует тип дороги, кривизну поворотов, разрешённую скорость и перепады высот на предстоящем участке пути. Эти данные поступают в блок управления ACC в режиме реального времени.
На основе картографической информации система прогнозирует оптимальную скорость и интенсивность торможения/разгона. Например, перед крутым подъёмом ACC может заранее увеличить тягу, а перед серпантином – плавно снизить скорость до безопасных значений. Это минимизирует резкие манёвры и повышает плавность хода.
Ключевые функции навигационной интеграции
- Прогнозируемое регулирование скорости: Автоматическое снижение скорости перед поворотами, съездами с трасс и зонами с ограничениями.
- Адаптация к рельефу: Упреждающий разгон перед подъёмами и использование торможения двигателем на спусках.
- Учёт дорожных условий: Корректировка дистанции при приближении к участкам с частыми заторами (определяется по историческим данным карт).
| Тип данных навигации | Влияние на работу ACC |
|---|---|
| Радиус поворота | Расчёт безопасной скорости до входа в вираж |
| Перекрёстки/съезды | Плавное торможение за 300-500 метров |
| Дорожные ограничения | Автоматическая установка предельной скорости |
Для реализации функции требуется высокоточная цифровая карта с 3D-данными и актуальная информация о дорожных знаках. Погрешность позиционирования GPS не должна превышать 1-2 метра, иначе система игнорирует навигационные подсказки. Водитель всегда может переопределить автоматические решения ручным управлением.
Перспективы развития: подключение к "умной" инфраструктуре
Современные АСС эволюционируют в направлении интеграции с интеллектуальной дорожной инфраструктурой через технологию V2I (Vehicle-to-Infrastructure). Это предполагает двусторонний обмен данными между автомобилем и дорожными сенсорами, светофорами, знаками и центрами управления трафиком. Система получает информацию о геометрии дороги, перекрытиях полос, авариях или погодных условиях за пределами зоны видимости камер и радаров.
Такой симбиоз позволяет прогнозировать сценарии движения на несколько километров вперед: АСС автоматически скорректирует скорость перед "зеленой волной", подготовится к съезду с автомагистрали или предупредит водителя о скрытой опасности. Одновременно автомобили передают анонимизированные данные о дорожных условиях (гололед, препятствия), формируя коллективный "цифровой след" для оптимизации светофорных циклов и маршрутизации.
Ключевые направления развития
- Кооперативное адаптивное круиз-контроль (CACC): группировка автомобилей в "электронные автопоезда" через V2V/V2I-связь с синхронным маневрированием и дистанцией до 0.5 сек.
- Интеграция с городскими системами: адаптация скорости под фазы светофоров, платные коридоры и зоны с ограничениями выбросов.
- Картографирование в реальном времени: использование облачных HD-карт с метаданными о ремонтах, парковках и ДТП.
| Технология | Влияние на функциональность АСС |
|---|---|
| 5G/6G сети | Снижение задержек связи до 1 мс для экстренных предупреждений |
| Edge computing | Локальная обработка данных с камер инфраструктуры |
| ИИ-алгоритмы | Прогнозирование трафика на основе агрегированных данных |
Основным вызовом остается обеспечение кибербезопасности и стандартизация протоколов связи между производителями автомобилей и инфраструктурными операторами. Пилотные проекты уже реализуются в рамках "умных городов": например, в Берлине АСС синхронизируется с 1,000 светофоров, сокращая время поездок на 17%.
Проверка работоспособности АСС перед длительной поездкой
Перед длительной поездкой убедитесь, что адаптивный круиз-контроль (АСС) корректно реагирует на изменение дорожной обстановки. Проверьте работу датчиков (радара и камеры) на предмет загрязнений льдом, грязью или снегом – очистите их мягкой тканью, не повреждая поверхность.
Протестируйте систему на безопасном участке дороги: активируйте АСС при движении за другим автомобилем, убедитесь в плавном регулировании скорости, адекватном замедлении при сближении и разгоне после перестроения или удаления впереди идущего транспорта. Обратите внимание на предупреждения в комбинации приборов.
Ключевые этапы диагностики
- Визуальный осмотр: Контроль целостности сенсоров на бампере и лобовом стекле, отсутствия препятствий в зоне обзора.
- Тест активации: Запуск системы на скорости от 30 км/ч (зависит от модели), проверка индикации на панели приборов.
- Реакция на помехи: Имитация резкого изменения дистанции (в безопасных условиях!), оценка плавности торможения/ускорения.
Важно: Если АСС отключается самопроизвольно или некорректно держит дистанцию, обратитесь в сервис до поездки. Не используйте систему при неисправностях или сложных погодных условиях (сильный дождь, туман).
Список источников

Для подготовки материала об адаптивном круиз-контроле использовались авторитетные технические публикации, документация автопроизводителей и исследования в области автомобильной электроники. Особое внимание уделялось актуальным данным о принципах работы современных систем ADAS.
Все источники прошли перекрёстную проверку на соответствие последним технологическим стандартам и рыночным реалиям. Ключевая информация синтезирована из следующих материалов:
- Технические бюллетени SAE International (J3016, J2399)
- Официальная документация производителей: Bosch, Continental, ZF
- Учебник "Автомобильные датчики и электронные системы" (Хейс, 2020)
- Научные статьи IEEE по радарным и лидарным технологиям
- Сравнительные исследования Euro NCAP по системам активной безопасности
- Руководства по эксплуатации автомобилей Mercedes-Benz, Toyota, Volvo
- Отчёты Society of Automotive Engineers о развитии автономного вождения