Невидимый помощник за рулем - система курсовой стабилизации
Статья обновлена: 01.03.2026
Современный автомобиль невозможно представить без электронных систем безопасности. Среди них особое место занимает система курсовой стабилизации, незаметно контролирующая поведение машины в критических ситуациях.
Данная технология анализирует данные с датчиков несколько раз в секунду, сравнивая траекторию движения с действиями водителя. При обнаружении малейших признаков заноса или сноса система мгновенно подтормаживает отдельные колеса и корректирует тягу двигателя.
Электронный ассистент работает в любых дорожных условиях, компенсируя ошибки управления и внешние факторы. Он остаётся самым надежным союзником водителя, предотвращая потерю контроля над автомобилем до того, как человек успеет среагировать.
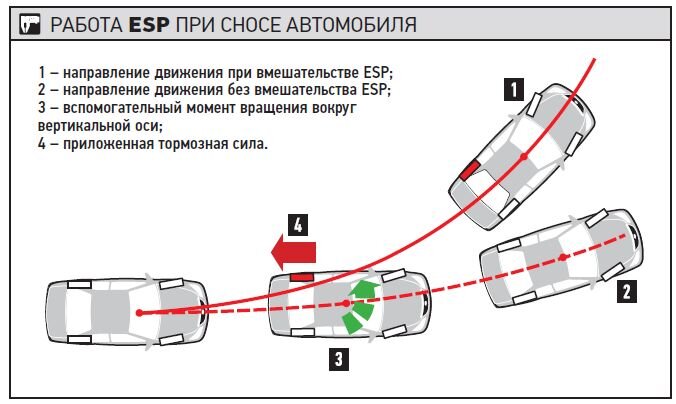
ESP против заноса: как система выравнивает траекторию на скользкой дороге
При возникновении заноса на скользком покрытии ESP мгновенно вычисляет отклонение реальной траектории автомобиля от заданной водителем траектории. Система непрерывно сопоставляет показания датчиков: угла поворота руля определяет желаемое направление, а датчики вращения колес и акселерометр фиксируют фактическое движение. Расхождение этих параметров сигнализирует о потере контроля.
Для коррекции траектории система избирательно притормаживает отдельные колеса через модуль ABS. Например, при заносе задней оси (избыточной поворачиваемости) ESP прикладывает тормозное усилие к внешнему переднему колесу, создавая стабилизирующий момент. Одновременно электронный блок управления может временно снизить крутящий момент двигателя через систему управления подачей топлива для уменьшения центробежной силы.
Ключевые этапы работы ESP
- Анализ данных: Сравнение показаний рулевого колеса, датчиков вращения колес, поперечного ускорения и рысканья (yaw rate)
- Выявление несоответствия: Определение типа потери сцепления (снос передней оси/занос задней оси)
- Точечное торможение: Принудительное замедление конкретных колес для создания противодействующего момента
- Коррекция тяги: Автоматическое снижение мощности двигателя при необходимости
| Тип потери контроля | Действие ESP | Эффект |
|---|---|---|
| Избыточная поворачиваемость (занос задней оси) | Торможение внешнего переднего колеса | Противодействие вращению автомобиля |
| Недостаточная поворачиваемость (снос передней оси) | Торможение внутреннего заднего колеса | Вытягивание передней части в поворот |
Предотвращение опрокидывания: влияние ESP на устойчивость внедорожников
Высокий центр тяжести внедорожников – ключевой фактор риска опрокидывания при резких маневрах, прохождении поворотов на скорости или движении по скользкому покрытию. Инерционные силы, возникающие при боковом смещении кузова, могут преодолеть стабилизирующий момент и привести к критической потере устойчивости.
Система курсовой стабилизации (ESP) активно противодействует этому риску, непрерывно анализируя данные о скорости вращения каждого колеса, угле поворота руля, поперечном ускорении и скорости рыскания. При обнаружении малейшего расхождения между фактической траекторией автомобиля и заданной водителем (например, начало заноса или сноса, провоцирующих крен), ESP мгновенно вмешивается в работу тормозов и двигателя.
Механизмы предотвращения опрокидывания ESP
ESP использует несколько стратегий для сохранения устойчивости высокого автомобиля:
- Избирательное подтормаживание колес: Система притормаживает конкретное колесо (чаще внешнее по отношению к повороту), создавая стабилизирующий момент, который "ставит" автомобиль на курс и гасит опасный крен. Это предотвращает переход поперечного скольжения в опрокидывание.
- Коррекция тяги двигателя: ESP взаимодействует с блоком управления двигателем, чтобы мгновенно снизить крутящий момент при риске потери устойчивости. Уменьшение мощности помогает восстановить сцепление колес и снижает центробежную силу, стремящуюся опрокинуть автомобиль.
- Подавление избыточной поворачиваемости и недостаточной поворачиваемости: ESP парирует как снос передней оси (недостаточная поворачиваемость), так и занос задней оси (избыточная поворачиваемость) – оба явления на высоком авто опасны развитием опрокидывания.
Эффективность ESP в предотвращении опрокидывания подтверждается исследованиями и реальной статистикой. Система способна отработать критическую ситуацию быстрее водителя, часто еще до того, как он осознает потерю контроля. Для внедорожников, где последствия опрокидывания особенно тяжелы, ESP является не просто помощником, а жизненно важным элементом активной безопасности.
Эффективное торможение в повороте: роль ESC для сохранения контроля
При экстренном торможении на дуге поворота автомобиль испытывает значительные боковые нагрузки. Давление на педаль тормоза в такой ситуации без электронного помощника часто приводит к блокировке внутренних (разгруженных) колес и потере управляемости – машина стремится к внешней стороне поворота или разворачивается.
Система курсовой стабилизации (ESC) непрерывно анализирует данные датчиков: угол поворота руля, скорость вращения каждого колеса, поперечное ускорение и рыскание. Если траектория, заданная водителем (через рулевое колесо), не совпадает с реальным направлением движения, ESC мгновенно вычисляет критическое отклонение и вмешивается.
Как ESC обеспечивает контроль при торможении в повороте
Алгоритм работы системы включает три ключевых действия:
- Избирательное подтормаживание колес: ESC притормаживает конкретное колесо (чаще внешнее по отношению к повороту), создавая стабилизирующий момент сил и компенсируя занос или снос.
- Коррекция тяги двигателя: Система снижает крутящий момент, передаваемый на ведущие колеса через ЭБУ двигателя, предотвращая пробуксовку и избыточную нагрузку на шасси.
- Сохранение вектора движения: Комбинируя торможение отдельных колес и управление тягой, ESC "доворачивает" автомобиль в направлении, заданном рулем, сохраняя курсовую устойчивость.
Преимущества использования ESC в подобных сценариях:
- Предотвращение сноса передней оси – автомобиль сохраняет способность поворачивать.
- Нейтрализация избыточной поворачиваемости – противодействие заносу задней оси.
- Стабилизация траектории – минимизация риска выезда на встречную полосу или обочину.
| Без ESC | С ESC |
|---|---|
| Блокировка колес при торможении в повороте | Избирательное торможение по алгоритму |
| Потеря управляемости, вращение | Корректировка траектории и курса |
| Увеличение тормозного пути на скользком покрытии | Оптимизированное сцепление колес с дорогой |
Важно помнить: ESC не отменяет законов физики. Система эффективно работает в пределах сцепных свойств шин. Резкие маневры на высокой скорости или экстремально скользкой дороге могут превысить ее возможности. Тем не менее, она остается незаменимым инструментом для сохранения контроля в критической ситуации, особенно при сложном комбинированном торможении.
Помощь при экстренном объезде препятствия без потери управления
При внезапном появлении препятствия система курсовой стабилизации мгновенно анализирует траекторию маневра водителя и динамику автомобиля. Она определяет риск заноса или потери управления при резком повороте руля и корректирует тормозные усилия на отдельных колесах.
Электроника предотвращает критический крен кузова и стабилизирует положение авто при перестроении, компенсируя избыточную или недостаточную поворачиваемость. Система дозированно притормаживает внутренние колеса относительно поворота, сохраняя курсовую устойчивость даже на скользком покрытии.
Ключевые функции при объезде
- Мгновенное реагирование – обработка данных с датчиков рулевого управления, поперечного ускорения и скорости вращения колес за 20 мс
- Дифференцированное торможение – автоматическое создание стабилизирующего момента вокруг вертикальной оси
- Контроль тяги – предотвращение пробуксовки ведущих колес при возврате на исходную полосу
| Без системы | С системой |
| Риск ритмического заноса | Корректировка траектории в фазе объезда |
| Потеря курса при перестроении | Стабилизация угла рыскания |
| Нестабильный выход из маневра | Плавное возвращение на исходную полосу |
Важно: Система не заменяет действия водителя, а усиливает их эффективность. При объезде необходимо сохранять уверенное давление на педаль тормоза и резко, но плавно работать рулем.
Стабилизация при разгоне на мокром асфальте: предотвращение пробуксовки

При резком нажатии на педаль газа на мокрой дороге ведущие колеса легко теряют сцепление с асфальтом, вызывая пробуксовку. Это приводит не только к бесполезному расходу мощности двигателя, но и к опасному уводу автомобиля в сторону или полной потере управляемости.
Система курсовой стабилизации (ESC) непрерывно анализирует данные с датчиков: скорость вращения каждого колеса, угол поворота руля, поперечное ускорение и положение педали газа. При обнаружении разницы в скоростях вращения ведущих колес, характерной для пробуксовки, система мгновенно вмешивается.
Как ESC предотвращает пробуксовку
Алгоритм работы включает три ключевых действия:
- Снижение мощности двигателя через команду блоку управления двигателем (ЭБУ) для уменьшения крутящего момента на колесах.
- Притормаживание буксующего колеса с помощью модулятора тормозных усилий. Сила торможения рассчитывается индивидуально для каждого колеса.
- Корректировка тяги при подключенной системе Traction Control (TCS), которая часто интегрирована в ESC. TCS дополнительно управляет пробуксовкой до перехода к жесткому торможению.
Эффект от срабатывания системы проявляется в:
- Сохранении прямолинейного движения без рыскания
- Максимально эффективном использовании сцепления шин с дорогой
- Стабильном разгоне без потери контроля
| Без ESC | С ESC |
|---|---|
| Риск бокового скольжения при пробуксовке | Автоматическое выравнивание траектории |
| Потеря времени на реакцию водителя | Коррекция за 20-50 миллисекунд |
| Износ шин из-за пробуксовки | Равномерное распределение нагрузки |
Важно: ESC не отменяет необходимости плавного управления газом на скользкой дороге, но существенно снижает последствия ошибок водителя. Система работает в фоновом режиме, обеспечивая предсказуемое поведение автомобиля даже при экстренном ускорении в дождь.
Действия системы при диагональном вывешивании колес на бездорожье
При диагональном вывешивании, когда противоположные колеса теряют контакт с грунтом (например, переднее правое и заднее левое), система курсовой стабилизации мгновенно распознает пробуксовку через датчики ABS и углового ускорения. Электронный блок управления анализирует разницу в скорости вращения колес и отклонение фактической траектории от заданной водителем.
Алгоритм активирует тормозные механизмы на зависших в воздухе колесах, перенаправляя крутящий момент через дифференциал на покрышки, сохраняющие сцепление. Параллельно система снижает подачу топлива для уменьшения мощности двигателя, предотвращая бесконтрольную пробуксовку.
Ключевые этапы работы системы
- Мониторинг сенсоров: отслеживание 100-200 раз/сек данных:
- Скорости вращения каждого колеса
- Угла поворота руля
- Поперечного ускорения кузова
- Динамическое торможение: импульсное поджатие тормозов на вывешенных колесах
- Перераспределение момента: автоматическая блокировка межосевого/межколесных дифференциалов
| Параметр | Без системы | С системой |
|---|---|---|
| Время восстановления сцепления | > 3 сек | < 0.5 сек |
| Потеря крутящего момента | До 100% | < 15% |
Эффективность подтверждается тестами на эластичной платформе: при 30-градусном крене система обеспечивает преодоление препятствия без вмешательства водителя за счет циклического изменения тормозного усилия и коррекции дроссельной заслонки.
Как ESP корректирует занос передней оси (снос) на переднеприводных авто
При возникновении сноса передней оси (недостаточной поворачиваемости) датчики ESP фиксируют критическое расхождение: угол поворота руля не соответствует реальной траектории движения автомобиля. Блок управления мгновенно распознаёт потерю сцепления передних колёс с дорогой и активирует систему коррекции.
ESP целенаправленно притормаживает заднее колесо, расположенное внутри поворота, создавая вращающий момент вокруг вертикальной оси автомобиля. Это принудительно разворачивает переднюю часть в направлении поворота, компенсируя снос. Одновременно система снижает крутящий момент двигателя через электронное управление дросселем или точечным подтормаживанием ведущих колёс.
Ключевые этапы работы системы
Алгоритм коррекции включает:
- Мониторинг параметров: Датчики отслеживают:
- Угол поворота руля
- Поперечное ускорение
- Скорость вращения каждого колеса
- Скорость рыскания (вращения вокруг вертикальной оси)
- Сравнение данных: Блок управления вычисляет расхождение между желаемой (на основе угла руля) и фактической траекторией.
- Целевое торможение: Активация тормозного механизма внутреннего заднего колеса для генерации стабилизирующего момента.
- Коррекция тяги: Снижение мощности двигателя для уменьшения нагрузки на передние колёса и восстановления их сцепления.
Эффект корректировки сноса ESP на переднеприводном авто:
| Без ESP | С ESP |
| Передние колёса теряют сцепление, авто смещается наружу поворота | Притормаживание внутреннего заднего колеса "подруливает" передок внутрь поворота |
| Водитель вынужден сбрасывать газ, теряя контроль | Автоматическое снижение тяги разгружает переднюю ось |
| Риск схода с траектории или вращения | Автомобиль сохраняет заданную траекторию |
Система работает превентивно, вмешиваясь за доли секунды до потери управляемости. Коррекция продолжается до восстановления соответствия между углом поворота руля и фактическим направлением движения, после чего ESP автоматически деактивирует тормозное воздействие и возвращает управление водителю.
Борьба с избыточной поворачиваемостью: контроль задней оси на поворотах
При избыточной поворачиваемости задняя ось теряет сцепление с дорогой, вызывая опасный занос задней части автомобиля в сторону внешней границы поворота. Это критическая ситуация, особенно на мокром или обледенелом покрытии, где водитель может не успеть среагировать достаточно быстро для стабилизации машины. Система курсовой стабилизации мгновенно распознает начало срыва задних колес через датчики угловой скорости и акселерометры.
Электронный блок управления активирует тормозной механизм переднего колеса, идущего по внешнему радиусу поворота, создавая контролируемый момент силы, который компенсирует вращательное движение кузова. Параллельно система может временно снизить мощность двигателя через управление дроссельной заслонкой, уменьшая центробежную силу и нагрузку на шины. Это позволяет "вернуть" заднюю ось в траекторию без потери управляемости.
Ключевые механизмы воздействия на заднюю ось
- Избирательное торможение: Принудительное замедление конкретных колес для генерации стабилизирующего момента.
- Коррекция тяги: Автоматическое снижение крутящего момента при риске пробуксовки колес.
- Адаптация к покрытию: Учет коэффициента сцепления (асфальт, снег, гравий) при расчете усилий.
| Ситуация | Действие системы | Результат |
|---|---|---|
| Резкий поворот на высокой скорости | Торможение внешнего переднего колеса + снижение мощности | Подавление вращения задней оси |
| Скольжение задних колес в гололед | Короткие импульсы тормозов на 2-3 колесах одновременно | Восстановление векторной стабильности |
Взаимодействие ABS и ESC при торможении на неровной поверхности
При экстренном торможении на дороге с переменным покрытием (например, чередование льда, асфальта, гравия или луж) возникает критическая ситуация. Разные коэффициенты сцепления под колёсами вызывают асимметрию тормозных сил: колёса на низкоадгезивных участках блокируются быстрее, чем на участках с хорошим сцеплением. Это провоцирует резкий разворот автомобиля вокруг вертикальной оси (занос) и полную потерь управляемости.
Система ABS предотвращает полную блокировку колёс за счёт импульсного изменения давления в тормозной магистрали. Однако на разнородных поверхностях её работы недостаточно: даже при сохранении вращения колёс разница в силе трения между правыми и левыми сторонами авто создаёт опасный вращательный момент. Здесь требуется интеллектуальное вмешательство системы курсовой устойчивости.
Синхронизация работы систем
ESC постоянно анализирует данные с датчиков:
- угла поворота руля
- поперечного ускорения
- скорости вращения колёс
- давления в тормозной системе
- Вычисляет, какое колесо имеет наилучшее сцепление с дорогой
- Инициирует избирательное подтормаживание конкретных колёс через гидравлический блок ABS
- При необходимости снижает крутящий момент двигателя через ЭБУ
| ABS | ESC |
|---|---|
| Контроль продольного скольжения | Контроль поперечной устойчивости |
| Сохраняет управляемость рулём | Корректирует траекторию движения |
| Работает только при торможении | Активна постоянно (в т.ч. при разгоне/накате) |
Результат синтеза технологий: ABS гарантирует минимальный тормозной путь без потери контроля над колёсами, а ESC нейтрализует возникающие боковые силы за счёт точечного изменения тормозных усилий. Например, при заносе задней оси система притормозит переднее колесо на внешней стороне поворота, создавая стабилизирующий противовращающий момент. Это позволяет сохранить курсовую устойчивость даже при экстремальном торможении на "рваном" покрытии.
Особенности работы системы при буксировке прицепа или лодки
При подключении прицепа система курсовой стабилизации (ESP/ESC) автоматически адаптирует алгоритмы работы, учитывая дополнительную массу и инерцию сцепки. Основной акцент смещается на предотвращение опасных колебаний – "рыскания" прицепа, которое может спровоцировать занос или опрокидывание автомобиля. Датчики системы непрерывно отслеживают не только угол поворота руля и боковое ускорение тягача, но и малейшие отклонения от заданной траектории, вызванные динамикой прицепа.
Электронный блок управления активирует тормозные механизмы отдельных колес автомобиля значительно раньше и интенсивнее, чем при движении без прицепа, особенно на поворотах или при резком маневрировании. Это создает стабилизирующий момент, гасящий поперечные колебания сцепки "автомобиль-прицеп". Дроссельная заслонка также управляется более сдержанно – система ограничивает резкий разгон, минимизируя риск возникновения продольных колебаний ("гармошки").
Ключевые отличия в функционировании
- Усиленный контроль рыскания: ESP активнее подтормаживает передние колеса при первых признаках раскачивания прицепа.
- Корректировка тяги: Система строже дозирует мощность двигателя, предотвращая буксование ведущих колес под нагрузкой и последующую потерю устойчивости.
- Адаптация к массе: Алгоритмы учитывают снижение динамики разгона/торможения и увеличение тормозного пути.
Важно помнить: ESP не компенсирует ошибки в распределении груза в прицепе или превышение допустимой массы. Неправильная загрузка (смещение центра тяжести вверх или назад) резко снижает эффективность системы и повышает риск аварии даже с активной стабилизацией.
ESP и круиз-контроль: совместная работа для безопасного движения
Система курсовой стабилизации (ESP) и адаптивный круиз-контроль (ACC) функционируют как взаимодополняющие компоненты единой экосистемы безопасности. ESP непрерывно отслеживает траекторию движения автомобиля через датчики угла поворота руля, поперечного ускорения и скорости вращения колес, мгновенно корректируя рыскание тормозными импульсами или снижением крутящего момента двигателя. Круиз-контроль, в свою очередь, автоматически поддерживает заданную водителем скорость, а в адаптивных версиях дополнительно регулирует дистанцию до впереди идущего транспорта с помощью радаров и камер.
При активации круиз-контроля ESP переходит в режим повышенной готовности, расширяя сферу своего влияния. Например, при резком торможении ACC на скользком покрытии ESP предотвращает блокировку колес и потерю управляемости, распределяя тормозные усилия. Анализируя данные о боковых ускорениях, ESP способна превентивно снизить скорость через команду блоку управления двигателем, если система прогнозирует снос оси в крутом вираже, который не успеет отработать круиз-контроль.
Ключевые аспекты синергии систем
Интеграция ESP и ACC обеспечивает:
- Динамическую стабилизацию при экстренном маневре на высокой скорости: ESP компенсирует занос, в то время как ACC временно отключает ускорение.
- Адаптацию к дорожным условиям – при обнаружении гололеда или мокрого асфальта ESP передает данные круиз-контролю для автоматического увеличения дистанции до впереди идущего ТС.
- Коррекцию скорости в поворотах: на основе информации о боковом ускорении ESP инициирует снижение скорости через ACC до безопасного значения.
| Ситуация | Действие ESP | Действие ACC |
|---|---|---|
| Резкое перестроение с мокрой дороги | Притормаживание внешних колес для гашения заноса | Приостановка ускорения, восстановление дистанции |
| Внезапное торможение лидера в повороте | Контроль сцепления колес с покрытием | Экстренное снижение скорости с учетом радиуса поворота |
Важно отметить: современные алгоритмы предусматривают приоритетность ESP в критических сценариях. При срабатывании стабилизации круиз-контроль временно деактивируется, передавая управление водителю, но продолжая мониторинг обстановки для последующего возобновления функций. Такое взаимодействие минимизирует риск ДТП при использовании автоматизированного поддержания скорости, превращая связку ESP/ACC в фундамент проактивной безопасности.
Калибровка датчиков рысканья после замены элементов подвески
Замена компонентов подвески (рычагов, амортизаторов, сайлент-блоков) неизбежно влияет на геометрию колес и углы установки. Это изменяет исходные параметры, по которым датчики рысканья (обычно встроенные в блок ESP/ESC) определяют вектор и скорость бокового смещения кузова. Без перекалибровки система курсовой стабилизации будет работать на устаревших данных, что приведет к некорректной коррекции заносов или избыточным срабатываниям.
Процедура калибровки (часто называемая "инициализацией датчика рыскания" или "адаптацией нулевого положения") выполняется через сервисное ПО дилерского сканера или специализированного диагностического оборудования. Она требует строгого соблюдения условий: автомобиль должен стоять на идеально ровной поверхности, давление в шинах соответствовать норме, топливный бак заполнен минимум на 90%, а в салоне отсутствовать лишняя нагрузка.
Ключевые этапы процедуры
- Предварительная проверка: Сканирование на ошибки в системах ABS/ESP, визуальный осмотр датчиков и проводки.
- Подготовка: Установка колес в прямое положение, прогрев шин до рабочей температуры.
- Активация режима калибровки через диагностический интерфейс (OBD-II).
- Фиксация нулевого положения: Система автоматически считывает показания датчиков в статичном состоянии в течение 10-30 секунд.
Важно: После замены элементов рулевого управления (наконечников, тяг) или демонтажа самого датчика рысканья обязательна проверка углов развала-схождения. Калибровка датчиков без регулировки схода-развала неэффективна.
| Симптомы некорректной калибровки | Последствия |
|---|---|
| Ложные срабатывания ESP на прямой траектории | Необоснованное подтормаживание колес, рывки руля |
| Запаздывание реакции системы в поворотах | Риск развития заноса при экстренном маневре |
| Постоянная индикация ошибки ESP/ESC | Отключение систем стабилизации и антиблокировки тормозов |
Некоторые современные системы допускают "самоадаптацию" датчиков после 15-20 км плавной езды по прямой, но при серьезном вмешательстве в подвеску ручной калибровки через диагностическое оборудование не избежать. Пренебрежение этой процедурой сводит на нет эффективность курсовой стабилизации.
Индикация срабатывания: что означает мигающий значок ESP на приборке
Мигающий значок ESP на приборной панели сигнализирует об активном вмешательстве системы курсовой устойчивости в управление автомобилем. Это происходит, когда электроника фиксирует потерю сцепления колёс с дорогой или риск заноса, например, при резком манёвре на скользком покрытии.
В такие моменты система автоматически подтормаживает отдельные колёса и корректирует работу двигателя, чтобы восстановить контроль над траекторией движения. Мигание индикатора подтверждает, что ESP в реальном времени компенсирует опасную ситуацию, предотвращая развитие сноса или вращения авто.
Как интерпретировать сигнал
Ключевые аспекты работы индикатора:
- Кратковременное мигание: Стандартное срабатывание ESP для коррекции незначительной потери устойчивости.
- Продолжительное мигание: Указывает на экстремальные условия (гололёд, мокрая трасса), где система работает интенсивно.
- Постоянно горит: Неисправность ESP или принудительное отключение системы водителем.
Важно: При мигающем значке сохраняйте плавное руление и избегайте резкого сброса газа. ESP действует эффективнее, когда колёса сохраняют контакт с дорогой, а не при блокировке тормозов.
| Состояние индикатора | Значение | Действия водителя |
|---|---|---|
| Мигает | Активная стабилизация | Плавно снизить скорость, не дёргать руль |
| Горит постоянно | Неисправность/отключение | Проверить систему у специалиста |
Система работает в фоновом режиме, поэтому мигание индикатора – единственный визуальный сигнал о её вмешательстве. Это прямое свидетельство того, что электронный "помощник" взял на себя часть задач по стабилизации авто, пока водитель сохраняет общий контроль над ситуацией.
Проверка работоспособности системы перед дальней поездкой
Перед длительным путешествием убедитесь в исправности электронного стабилизатора, запустив двигатель и визуально проверив индикаторы на приборной панели. Лампочка системы должна кратковременно загореться при включении зажигания и погаснуть через 2-3 секунды после запуска мотора – это подтверждает успешное завершение самодиагностики.
Выполните тест-драйв протяженностью 3-5 км на безопасном участке дороги, имитируя опасные ситуации: резко войдите в поворот на скорости 40-60 км/ч, резко разгонитесь на мокром покрытии или выполните объезд воображаемого препятствия. При корректной работе вы ощутите характерные точечные подтормаживания колес и легкие рывки руля, сопровождающиеся миганием индикатора стабилизации.
Ключевые этапы диагностики

- Проверка датчиков – убедитесь в отсутствии повреждений проводки у колесных сенсоров и чистоты контактов
- Тест АБС – экстренное торможение на гравии должно вызывать вибрацию педали
- Анализ ошибок – подключите OBD-сканер для выявления скрытых неисправностей (коды C1130, C0121)
| Признак неисправности | Действия водителя |
| Индикатор горит постоянно | Отменить поездку, провести компьютерную диагностику |
| Отсутствие реакции на занос | Проверить предохранитель F32 и реле блока ESP |
Помните: Система не заменяет зимнюю резину и законы физики – сохраняйте безопасную дистанцию и адаптируйте стиль вождения к дорожным условиям даже при активной стабилизации.
Отключение ESC через меню: когда это действительно необходимо
Система курсовой стабилизации (ESC) является критически важным элементом активной безопасности, автоматически корректируя траекторию движения при потере сцепления или заносе. Ее постоянная работа в подавляющем большинстве дорожных ситуаций – будь то мокрый асфальт, гололед или резкий маневр – предотвращает потерю контроля над автомобилем, сохраняя жизни водителя и пассажиров.
Однако существуют специфические условия, при которых принудительное отключение ESC через меню бортового компьютера становится технически оправданной мерой. Это решение требует осознанного понимания рисков и применяется исключительно в контролируемой обстановке, когда работа системы прямо препятствует выполнению поставленной задачи.
Ситуации, требующие деактивации ESC
- Попытки выбраться из глубокой грязи, снежной каши или сыпучего песка: ESC, обнаруживая пробуксовку колес, автоматически снижает мощность двигателя. В условиях бездорожья это мешает раскачке автомобиля и созданию инерции, необходимой для преодоления препятствия.
- Движение по глубокому снегу или рыхлому грунту: Постоянное подтормаживание буксующих колес системой может привести к полному обездвиживанию автомобиля, лишая его возможности "найти" точку опоры.
- Использование цепей противоскольжения: ESC может некорректно интерпретировать работу колес с цепями как потерю сцепления, вызывая нежелательные срабатывания и рывки.
- Специфические спортивные режимы на закрытых трассах: Для опытных водителей, целенаправленно отрабатывающих приемы контролируемого заноса или дрифта на безопасных площадках, система будет излишне ограничивать управляемость.
- Диагностика или техническое обслуживание: Некоторые виды работ (например, проверка АБС на стенде) требуют временного отключения ESC для корректного проведения процедур.
Принудительное отключение для движения по глубокому снегу или грязи
В условиях глубокого снега, вязкой грязи или сыпучего песка система курсовой стабилизации (ESC) может препятствовать движению, ошибочно воспринимая пробуксовку колёс как потерю управляемости. Принудительное отключение ESC позволяет водителю целенаправленно использовать контролируемое вращение колёс для преодоления сложных участков.
Активация пробуксовки создаёт необходимый "эффект лопаты", раскапывая грунт или снег под шинами и обеспечивая сцепление. При заблокированной ESC автомобиль не будет автоматически притормаживать буксующие колёса и снижать крутящий момент двигателя, что критично для поддержания инерции движения в экстремальной ситуации.
Особенности работы при отключённой системе
Ключевые аспекты управления без электронной стабилизации:
- Только ручное отключение: Деактивация ESC выполняется водителем через отдельную кнопку (обычно с пиктограммой скользящего автомобиля) и требует подтверждения на приборной панели.
- Избирательное торможение: Принудительная пробуксовка одного колеса помогает "зацепиться" за твёрдый грунт, когда другие колёса теряют сцепление.
- Контроль инерции: Поддержание постоянного тягового усилия предотвращает застревание, особенно при преодолении сугробов или грязевых "ловушек".
Важно: ESC автоматически включается при превышении скорости 50 км/ч или после повторного запуска двигателя. После выезда на твёрдое покрытие систему необходимо активировать немедленно – отключённая ESC резко повышает риск опрокидывания в поворотах или при манёврах.
Автоматическое повторное включение ESP после остановки автомобиля
В некоторых ситуациях, например при трогании на рыхлом снегу или крутом подъеме, система может временно деактивироваться для обеспечения необходимой пробуксовки колес. Это позволяет преодолеть сложный участок без потери тяги, но создает потенциальный риск при последующем движении, если ESP останется отключенной.
Для исключения человеческого фактора и гарантии безопасности современные системы оснащены функцией автоматического повторного включения. Как только автомобиль полностью останавливается (скорость ≈ 0 км/ч), ESP самостоятельно переходит в активный режим без каких-либо действий со стороны водителя. Это происходит мгновенно при снятии ноги с педали тормоза или начале движения.
Ключевые преимущества автоматической реактивации
Основные выгоды технологии:
- Безопасность: Гарантирует восстановление полного контроля над авто при возобновлении движения, особенно критичное на скользких дорогах или виражах.
- Удобство: Избавляет водителя от необходимости ручного включения системы после кратковременной деактивации.
- Предотвращение ошибок: Исключает риск забывчивости или задержки с повторной активацией ESP.
Данная функция работает независимо от способа остановки – будь то штатное торможение, срабатывание антиблокировочной системы (ABS) или просто прекращение движения на подъеме. Технология мониторит состояние автомобиля в реальном времени, обеспечивая непрерывную защиту без лишнего вмешательства человека.
Особенности системы на гибридах и электромобилях: мгновенный крутящий момент
На гибридных и полностью электрических транспортных средствах системы курсовой стабилизации (ESC) получают уникальное преимущество благодаря мгновенной доступности максимального крутящего момента электродвигателей. В отличие от ДВС, где для достижения пикового крутящего момента требуется время (поднятие оборотов, переключение передач), электродвигатель выдает его практически мгновенно, с первого оборота вала. Эта особенность кардинально меняет возможности системы по активному вмешательству для коррекции траектории.
Алгоритмы ESC на таких автомобилях могут использовать электродвигатели не только для рекуперативного торможения отдельных колес, но и для создания точных корректирующих тяговых усилий. Система способна буквально за доли секунды прибавить тягу на одном ведущем колесе и уменьшить на другом, создавая стабилизирующий момент вокруг вертикальной оси автомобиля, без обязательного задействования традиционных гидравлических тормозов. Это значительно расширяет арсенал воздействий ESC.
Повышенная точность и скорость реакции
- Мгновенный отклик: Электродвигатели реагируют на команду управления ESC почти без задержек, что позволяет системе действовать исключительно быстро при первых признаках потери устойчивости (сноса или заноса).
- Тонкое дозирование усилия: Возможность очень точно регулировать крутящий момент на каждом отдельном ведущем колесе (особенно актуально для авто с несколькими электродвигателями) позволяет ESC реализовывать более сложные и эффективные сценарии стабилизации.
- Синергия с рекуперацией: Тормозное усилие, создаваемое электродвигателем при рекуперации энергии, может использоваться системой ESC для подтормаживания колес столь же мгновенно и точно, как и тяговое усилие.
- Снижение износа тормозов: Возможность стабилизировать автомобиль за счет перераспределения тяги, а не только торможения, уменьшает нагрузку на традиционную фрикционную тормозную систему.
| Аспект | Традиционный ДВС | Гибрид / Электромобиль |
|---|---|---|
| Доступность пикового крутящего момента | Требуется время (обороты, передача) | Мгновенная (с 0 об/мин) |
| Основное средство воздействия ESC | Торможение отдельных колес | Торможение + Точное управление тягой колес |
| Скорость реакции системы | Ограничена скоростью работы ДВС и АКПП/РКПП | Ограничена только скоростью работы контроллера и электромотора |
Таким образом, интеграция ESC с силовой установкой гибрида или электромобиля, использующая мгновенный крутящий момент, создает принципиально более быструю, точную и гибкую систему стабилизации. Электроусилитель руля (EPS), также получающий команды от ESC, работает в тесной связке с электромоторами и рекуперативным торможением, обеспечивая комплексное воздействие на динамику автомобиля для сохранения курса в критических ситуациях.
ESP в условиях горных дорог: контроль скорости на затяжных спусках
Затяжные спуски на горных серпантинах представляют особую опасность для водителей. Постоянное и длительное торможение приводит к критическому перегреву тормозных колодок и дисков, резко снижая их эффективность – возникает явление "закипания тормозов". Дополнительную сложность вносит переменный коэффициент сцепления колес с дорожным покрытием (асфальт, гравий, мокрые участки) и необходимость точного маневрирования на поворотах.
В таких экстремальных условиях система курсовой стабилизации (ESP) становится незаменимым помощником. Ее ключевая задача на спуске – поддерживать заданную водителем скорость и траекторию движения, предотвращая как опасное ускорение автомобиля под уклон, так и потерю управляемости из-за блокировки колес или заноса при торможении или на повороте. ESP активно взаимодействует с системами ABS и TCS, интеллектуально управляя тормозным усилием на каждом колесе в отдельности.
Как ESP обеспечивает безопасность на спусках
Основные функции ESP при движении под уклон:
- Автоматическое подтормаживание: Если автомобиль начинает ускоряться сверх желаемой скорости (например, из-за крутизны уклона), ESP самостоятельно инициирует короткие импульсные тормозные воздействия на одно или несколько колес. Это создает эффект "торможения двигателем" и удерживает скорость на безопасном уровне без постоянного нажатия водителем на педаль тормоза.
- Предотвращение блокировки колес: Используя датчики ABS, система постоянно отслеживает скорость вращения каждого колеса. При риске блокировки (например, на участке с низким сцеплением или при резком торможении) ESP мгновенно сбрасывает давление в тормозной магистрали заблокированного колеса, сохраняя его вращение и управляемость автомобиля.
- Стабилизация курса в поворотах: На горных виражах под уклон легко потерять контроль. Если датчики ESP фиксируют начало заноса (рыскания) или сноса передней оси, система избирательно подтормаживает конкретные колеса, создавая стабилизирующий момент и помогая водителю удержать нужную траекторию.
- Координация с двигателем (при поддержке TCS): ESP взаимодействует с системой контроля тяги (TCS). При необходимости система может снизить крутящий момент двигателя через блок управления, уменьшая тягу на ведущих колесах и дополняя действие тормозов для контроля скорости.
Сравнение движения на затяжном спуске с ESP и без нее:
| Ситуация / Параметр | Без ESP | С ESP |
|---|---|---|
| Контроль скорости на спуске | Требует постоянного и точного давления на педаль тормоза, высокий риск перегрева | Автоматическое поддержание скорости импульсным торможением, снижение нагрузки на тормоза |
| Риск блокировки колес | Высокий, особенно на мокром/гравийном покрытии или при резком торможении | Минимальный, ABS предотвращает блокировку по команде ESP |
| Удержание траектории в повороте | Зависит только от навыков водителя, высок риск заноса/сноса | Активная стабилизация подтормаживанием отдельных колес |
| Износ тормозной системы | Значительный из-за постоянного трения и перегрева | Снижен за счет импульсного режима работы и распределения нагрузки |
Важно помнить, что ESP не отменяет необходимости правильной техники спуска – использования пониженных передач для торможения двигателем. Система работает в паре с водителем, компенсируя человеческие ошибки и физические ограничения тормозной системы, делая прохождение опасных горных участков максимально безопасным и предсказуемым.
Система стабилизации и зимняя резина: почему шины критично важны
Система курсовой устойчивости (ESC) способна корректировать траекторию движения, предотвращая заносы и срывы в скольжение, но её эффективность напрямую упирается в качество сцепления шин с дорожным покрытием. На летней резине при отрицательных температурах резина дубеет, теряя эластичность, а рисунок протектора не рассчитан на отвод снежной каши или воды со льдом. ESC, пытаясь выровнять машину через подтормаживание отдельных колёс и управление крутящим моментом двигателя, просто не найдёт достаточного контакта для передачи необходимых усилий на асфальт.
Зимние шины, особенно шипованные или с современными ламелями, сохраняют гибкость на морозе и обеспечивают принципиально иной уровень сцепления на льду, укатанном снегу или мокрой зимней дороге. Без этого ESC не сможет реализовать заложенные алгоритмы стабилизации – система будет "бороться" со сносом или заносом, но её действия окажутся запоздалыми и недостаточно эффективными из-за проскальзывания колёс.
Ключевые аспекты взаимодействия ESC и зимней резины
Рассмотрим критичные факторы:
- Порог срабатывания ESC: Зимняя резина повышает порог скорости и критичность манёвра, при котором система может потерять контроль. На летней резине ESC активируется чаще и раньше, но часто безуспешно.
- Точность работы датчиков: ESC полагается на данные о скорости вращения колёс, ускорении и угле поворота руля. Проскальзывание на неподходящей резине искажает эту информацию, затрудняя корректный расчёт корректирующих воздействий.
- Эффективность подтормаживания: Основной инструмент ESC – притормаживание отдельных колёс. Зимние шины обеспечивают необходимую силу трения для замедления конкретного колеса без блокировки.
Сравнение влияния резины на работу ESC:
| Параметр | Летняя резина зимой | Зимняя резина |
|---|---|---|
| Сцепление на льду/снегу | Крайне низкое | Высокое |
| Реакция ESC на занос | Запоздалая, малоэффективная | Своевременная, действенная |
| Дистанция стабилизации | Значительно увеличена | Минимизирована |
| Риск полной потери управления | Высокий | Сниженный |
Важно помнить: даже самая совершенная ESC не отменяет законов физики. Если силы инерции в повороте или при торможении превышают предельное сцепление шин с дорогой, система не сможет удержать автомобиль. Зимняя резина – это базовое условие, позволяющее электронным помощникам, включая систему стабилизации, работать в расчётном эффективном диапазоне. Без неё ESC превращается в беспомощного наблюдателя за развитием аварийной ситуации.
Диагностика неисправностей: типовые коды ошибок и их расшифровка
Современные системы курсовой стабилизации (ESC, ESP, VSC) оснащены встроенной самодиагностикой, фиксирующей отклонения от нормы в виде уникальных кодов неисправностей (DTC – Diagnostic Trouble Codes). Эти коды, считанные через диагностический разъем OBD-II сканером, являются отправной точкой для точного определения проблемного узла.
Коды формируются по стандартизированной структуре, где первый символ указывает на задействованную систему (например, "C" – шасси), а последующие цифры детализируют конкретный сенсор или компонент. Расшифровка требует обращения к мануалу производителя, но некоторые ошибки носят универсальный характер.
Распространенные коды и их интерпретация
Типичные неисправности, отражаемые системой стабилизации:
- C0110 / C1145 – Проблемы с насосом модуля гидравлики. Причины: обрыв цепи, заклинивание двигателя насоса, низкое напряжение.
- C0121 / C0128 – Неисправность выключателя стоп-сигнала. Некорректные данные о торможении нарушают алгоритмы ESP.
- C1010 / C1020 – Отказ датчика угла поворота рулевого колеса (SAS). Система теряет информацию о действиях водителя.
| Код ошибки | Компонент | Возможные причины |
|---|---|---|
| C0035, C0040 | Датчик скорости вращения колеса (FR/FL) | Обрыв проводов, загрязнение, повреждение магнитного кольца |
| C0050 | Датчик положения педали тормоза | Калибровка, механический износ, окисление контактов |
| C1130 | Модуль ESP | Внутренняя ошибка процессора, повреждение проводки CAN-шины |
Важно: Коды указывают на цепь или компонент, но не всегда на конкретную причину. Например, C0035 может означать как поломку датчика, так и повреждение проводки до него. После чтения ошибок обязательна:
- Проверка актуальных параметров датчиков в реальном времени.
- Визуальный осмотр разъемов и проводки на предмет коррозии или повреждений.
- Анализ истории ошибок (постоянные/временные).
Постоянное присутствие кодов, связанных с датчиками (например, C1095 – датчик поперечного ускорения), часто требует их замены. Ошибки гидроблока (C1186 – неисправность клапана) могут указывать на необходимость ремонта или замены всего модуля. Своевременная расшифровка кодов предотвращает некорректную работу системы и сохраняет безопасность.
Стоимость ремонта датчиков угла поворота руля при отказе ESP
Отказ системы ESP (Electronic Stability Program) часто сигнализирует о проблемах с датчиком угла поворота рулевого колеса (SWS - Steering Wheel Sensor). Этот датчик критически важен для работы ESP, так как предоставляет блоку управления информацию о направлении, заданном водителем. Без точных данных о положении руля система не может корректно сравнивать желаемую траекторию с фактическим движением автомобиля и вмешиваться для предотвращения заноса или сноса.
Стоимость восстановления работоспособности датчика угла поворота руля (и, как следствие, ESP) варьируется в широких пределах. На цену влияет множество факторов, включая марку и модель автомобиля, тип самого датчика (интегрированный в блок подрулевых переключателей или отдельный), характер неисправности и выбранный способ ремонта.
Факторы, влияющие на стоимость
Основные составляющие затрат:
- Цена нового датчика: Самый значительный фактор. Оригинальные датчики для премиальных марок могут стоить десятки тысяч рублей. Аналоги (OEM или послепродажные) обычно дешевле, но их качество и совместимость могут различаться.
- Сложность доступа и демонтажа/монтажа: На многих современных автомобилях SWS интегрирован в блок подрулевых переключателей (комбинацию), требующий аккуратного снятия рулевого колеса, отключения подушки безопасности и разборки кожуха рулевой колонки. Это увеличивает трудозатраты.
- Необходимость калибровки: После замены датчика или снятия рулевого колеса обязательно требуется процедура калибровки (инициализации/адаптации) нулевого положения руля. Это делается с помощью диагностического оборудования и требует времени.
- Диагностика: Точное определение неисправности самого датчика, его проводки или разъемов с помощью сканера.
- Характер поломки: Иногда проблема кроется не в самом датчике, а в поврежденной проводке, окисленных контактах или неисправности связанных элементов (например, датчика скорости вращения колеса). Ремонт проводки обычно дешевле замены датчика.
Ориентировочные затраты
| Вид работ/запчасть | Ориентировочная стоимость (руб.) | Примечание |
|---|---|---|
| Диагностика системы ESP/датчика SWS | 500 - 2000 | Зависит от СТО и региона |
| Оригинальный датчик SWS (новый) | 5000 - 40000+ | Сильно зависит от марки/модели |
| Неоригинальный аналог (новый) | 2000 - 20000 | Качество может варьироваться |
| Б/У датчик SWS | 1000 - 10000 | Рискованный вариант, ресурс неизвестен |
| Работы по замене датчика (без стоимости датчика) | 1500 - 6000 | Зависит от сложности доступа |
| Калибровка (инициализация) датчика | 500 - 2000 | Обязательная процедура после замены/снятия руля |
| Ремонт проводки/контактов | 1000 - 5000 | Если проблема не в самом датчике |
Важно помнить: Попытки сэкономить на диагностике или установке дешевых некачественных аналогов/БУ запчастей могут привести к быстрому повторному отказу, некорректной работе ESP (что опасно!) и дополнительным расходам в будущем. Калибровка после замены или любых работ с рулевой колонкой – не опция, а необходимость для правильного функционирования системы.
Влияние разбалансировки колес на корректность работы датчиков ABS
Разбалансировка колес вызывает вибрации, передающиеся на ступицы и элементы подвески, где установлены датчики ABS. Постоянная тряска провоцирует микросдвиги сенсоров относительно импульсных колес, что нарушает стабильность воздушного зазора. Это приводит к искажению сигнала о скорости вращения – датчики начинают фиксировать ложные колебания или пропуски импульсов даже при равномерном движении.
Система ABS интерпретирует искаженные данные как признаки блокировки колес, хотя реального скольжения не происходит. Ложные сигналы провоцируют ошибочные срабатывания: модулятор давления преждевременно снижает тормозное усилие на вибрирующем колесе. Это нарушает синхронность работы контуров и провоцирует рывки при торможении, что особенно критично на скользком покрытии.
Ключевые последствия для систем безопасности
- Ложные активации ABS: срабатывание системы при отсутствии реальной блокировки колес
- Ошибки расчета скорости: расхождение показаний между колесами из-за неравномерных помех
- Некорректная работа ESP: система курсовой стабилизации получает неверные данные для коррекции траектории
| Тип искажения сигнала | Влияние на ABS | Риск для водителя |
|---|---|---|
| Прерывистый сигнал | Ложное определение блокировки | Увеличение тормозного пути |
| Амплитудные колебания | Ошибки в расчете скорости вращения | Некорректное распределение тормозных усилий |
| Фазовые сдвиги | Десинхронизация контуров | Потеря курсовой устойчивости в повороте |
Регулярная балансировка колес – обязательное условие для точной работы датчиков. При вибрациях руля на скорости 80-120 км/ч необходимо проверить дисбаланс, даже если шины визуально целы. Игнорирование проблемы ведет к каскадным сбоям: от ложных сигналов ABS до полной деактивации системы стабилизации при превышении порога ошибок.
ESP в автомобилях с разными типами привода: особенности настройки
Электронная система стабилизации (ESP) адаптируется под специфику трансмиссии для максимальной эффективности. Принципиальные различия в распределении крутящего момента и динамике срыва осей требуют уникальных алгоритмов вмешательства.
Инженеры калибруют параметры ESP индивидуально для каждого типа привода, учитывая особенности поведения шасси в критических режимах. Это влияет на интенсивность подтормаживания колёс, степень дросселирования двигателя и скорость реакции датчиков.
Специфика работы по типам трансмиссии
- Передний привод (FWD):
- Акцент на предотвращение сноса передней оси путём агрессивного подтормаживания внутреннего заднего колеса
- Жёсткое ограничение мощности при недостаточной поворачиваемости
- Корректировка заноса лёгким притормаживанием внешнего переднего колеса
- Задний привод (RWD):
- Приоритет борьбы с избыточной поворачиваемостью путём активного подтормаживания внешнего переднего колеса
- Мгновенное сброс тяги при детектировании заноса
- Дозированная пробуксовка для сохранения управляемости (в спортивных режимах)
- Полный привод (AWD):
- Комплексное управление межосевым дифференциалом и тормозами
- Динамическое перераспределение момента между осями вместо интенсивного торможения
- Индивидуальные сценарии для подключаемых и постоянных систем полного привода
| Тип привода | Ключевая задача ESP | Основной метод коррекции |
|---|---|---|
| Передний (FWD) | Подавление сноса передка | Торможение внутреннего заднего колеса |
| Задний (RWD) | Нейтрализация заноса | Торможение внешнего переднего колеса + сброс газа |
| Полный (AWD) | Балансировка тяги по осям | Перераспределение момента через муфты |
Современные системы учитывают даже расположение двигателя (поперечное/продольное) и тип подвески, адаптируя логику работы под центр тяжести и кинематику. В гибридах ESP координируется с электромоторами для прецизионного контроля тяги.
Производители внедряют несколько программ стабилизации (спорт/снег/бездорожье), где степень и характер вмешательства ESP варьируются кардинально. Например, в off-road режимах допускается контролируемая пробуксовка, а в гоночном - увеличиваются пороги срабатывания.
Трогание на подъеме с системой HSA: как предотвращает откат назад
При трогании в гору система HSA (Hill Start Assist) автоматически удерживает тормозное давление в течение нескольких секунд после отпускания педали тормоза. Это происходит без участия водителя, когда автомобиль стоит на уклоне свыше определенного градуса (обычно от 5%). Датчики системы фиксируют угол наклона, положение педалей и вектор движения, активируя функцию только в необходимый момент.
Водитель может спокойно перенести ногу с тормоза на акселератор, не опасаясь отката. HSA продолжает удерживать колеса заблокированными до тех пор, пока не будет достигнут достаточный крутящий момент для движения вперед. Система самостоятельно деактивируется при начале поступательного движения, обеспечивая плавный старт без рывков.
Ключевые этапы работы HSA
- Водитель полностью останавливает авто на подъеме, удерживая тормоз
- При отпускании педали тормоза система автоматически сохраняет давление в тормозных контурах
- Водитель выжимает сцепление (на МКПП) и нажимает акселератор
- HSA удерживает тормоза до момента, когда крутящий момент двигателя превысит силу скатывания
- Автоматическое плавное отпускание тормозов при начале движения вперед
Преимущества технологии: исключает необходимость ручного стояночного тормоза или "перегазовки", предотвращает столкновение с автомобилем сзади при откате. Особенно эффективна при старте на крутых склонах, на скользком покрытии или в условиях плотного трафика.
| Без HSA | С HSA |
|---|---|
| Риск отката на 0.5-1 метр | Нулевое смещение назад |
| Необходимость координации трех педалей | Стандартное переключение ноги на газ |
| Повышенный износ сцепления | Защита трансмиссии от перегрузок |
Использование функции Trailer Sway Control при раскачивании прицепа
Система курсовой стабилизации распознаёт опасное боковое раскачивание прицепа через датчики рысканья и ускорения, отслеживая отклонения от заданной траектории движения автомобиля. При выявлении характерных колебаний Trailer Sway Control (TSC) мгновенно активируется, не требуя вмешательства водителя.
Алгоритм TSC принудительно снижает крутящий момент двигателя через электронный блок управления, ослабляя тяговое усилие на фаркоп, и выборочно подтормаживает отдельные колёса автомобиля для создания стабилизирующего противодействия. Это гасит резонансные колебания прицепа до восстановления устойчивости автопоезда.
Ключевые особенности работы системы
- Автономное срабатывание – реагирует на амплитуду и частоту колебаний, не завися от включения кнопки стабилизации
- Дифференцированное торможение – притормаживает колёса противоположной раскачиванию стороны для "выравнивания" автопоезда
- Снижение мощности – временно ограничивает подачу топлива для уменьшения динамических нагрузок на сцепку
| Стадия раскачивания | Действие TSC |
|---|---|
| Начальные колебания прицепа (±3-5° от оси) | Коррекция крутящего момента двигателя |
| Резонансное раскачивание (>7°) | Избирательное торможение передних колёс |
| Критическая амплитуда (>12°) | Полное отключение подачи топлива + импульсное торможение всех колёс |
Важно: система не заменяет правильную загрузку прицепа (60% веса – передняя часть) и использование зеркал заднего вида с расширенным углом обзора. TSC эффективна только при исправной работе тормозной системы и электронных компонентов ESP.
Модернизация подушек безопасности через блок управления ESC при ДТП
Интеграция электронного блока управления ESC с системой подушек безопасности кардинально повышает их эффективность при авариях. ESC непрерывно анализирует данные с датчиков продольного и поперечного ускорения, угла поворота руля и скорости вращения колёс, формируя детальную картину поведения автомобиля в критический момент. Эти параметры позволяют предсказать тип и силу предстоящего столкновения до физического контакта с препятствием.
При срабатывании подушек блок ESC мгновенно передаёт системе SRS информацию о динамике автомобиля: направлении заноса, силе бокового скольжения или риске опрокидывания. Это обеспечивает адаптивное срабатывание подушек с учётом реальной траектории движения и положения кузова. Например, при вращении автомобиля система рассчитает оптимальный момент и интенсивность раскрытия, компенсируя центробежные силы.
Ключевые преимущества интеграции
- Ранняя активация: ESC фиксирует потерю устойчивости за 150-500 мс до удара, давая системе SRS критический запас времени.
- Дифференцированное срабатывание: Боковые подушки нагруженной стороны раскрываются интенсивнее при риске опрокидывания.
- Синхронизация с преднатяжителями: Ремни безопасности автоматически затягиваются в нужный момент на основе данных о вращении.
| Параметр ESC | Влияние на подушки |
|---|---|
| Угол рыскания | Корректирует силу раскрытия боковых подушек |
| Поперечное ускорение | Определяет приоритетность срабатывания шторок |
| Скорость изменения курса | Активирует преднатяжители ремней до удара |
Совместная работа систем особенно эффективна при сложных ДТП: перекрестных ударах или серии столкновений. Алгоритмы ESC идентифицируют многоэтапность аварии, предотвращая преждевременное сдувание подушек после первого контакта. Технология снижает риск травм при опрокидывании, где традиционные датчики удара часто запаздывают.
Адаптация системы курсовой стабилизации под шины разного диаметра после замены колес
Замена колес с отличным от штатного диаметром требует обязательной калибровки датчиков ESP. Разница в высоте профиля или радиусе диска напрямую влияет на показания скорости вращения колес, что искажает расчеты электронного блока управления. Без корректировки система получает неверные данные о реальной скорости автомобиля, провоцируя ложные срабатывания или запоздалое вмешательство.
Современные ESC-системы предусматривают процедуру адаптации через диагностический разъем OBD-II. Механик считывает новые параметры покрышек (включая индекс нагрузки и скоростной индекс) и заносит их в память ЭБУ. Некоторые модели допускают самостоятельную настройку через меню бортового компьютера с обязательной последующей проверкой угловых датчиков и акселерометра.
Критические аспекты переобучения
- Точность замеров: погрешность ввода диаметра свыше 3% вызывает системные ошибки
- Комплексная калибровка: параллельная настройка датчиков давления TPMS и ABS
- Тестовые условия: процедура требует движения по прямой на 40-60 км/ч в течение 5-10 минут
| Параметр | Штатные шины | Неадаптированные шины |
| Расчет тормозного усилия | Оптимальный | Избыточное/недостаточное |
| Распознавание заноса | 0.2-0.5 сек | До 1.5 сек |
| Погрешность скорости | ≤ 2% | До 12% |
Важно: Установка покрышек с разным износом протектора на одной оси блокирует адаптацию. Система активирует аварийный режим с постоянным предупреждением на приборной панели. Для полного восстановления функционала требуется замена шин и принудительный сброс кэшированных ошибок через диагностическое оборудование.
Автоматическая активация функций очистки тормозов после проезда луж
Попадание воды на тормозные диски при проезде луж вызывает резкое снижение эффективности торможения. Влага создает пленку между колодками и дисками, увеличивая тормозной путь и провоцируя временную потерю контроля. Это особенно опасно при необходимости экстренной остановки сразу после водного препятствия.
Интеллектуальная система определяет фактор намокания по данным датчиков ABS и колесных сенсоров, анализируя резкие изменения скорости вращения и температуры. При обнаружении характерных признаков проезда лужи мгновенно активируется алгоритм принудительной просушки без участия водителя.
Принцип работы и ключевые преимущества

- Автономный контроль: датчики фиксируют проезд водного препятствия по вибрациям и перепадам температуры дисков
- Короткие импульсы торможения: система кратковременно прижимает колодки к дискам при движении на скорости 50-80 км/ч, вызывая нагрев и испарение влаги
- Безопасный алгоритм: сила прижатия регулируется для исключения блокировки колес и потери управляемости
Функция интегрирована в блок управления ESC, используя штатные гидравлические клапаны и насос. Это обеспечивает мгновенный отклик и восстановление полной эффективности тормозов за 2-3 секунды. Водитель ощущает лишь легкую вибрацию педали, сохраняя полный контроль над автомобилем.
ESP и адаптивный головной свет: синхронизация в резких поворотах
При входе в резкий поворот на высокой скорости первичной задачей становится сохранение управляемости и предотвращение сноса или заноса. Именно здесь вступает в работу система ESP (Electronic Stability Program). Анализируя данные с датчиков (угол поворота руля, скорость вращения колес, поперечное ускорение, рыскание), она мгновенно распознает начало потери устойчивости. ESP целенаправленно притормаживает одно или несколько колес и, при необходимости, снижает крутящий момент двигателя, создавая корректирующий момент силы, который помогает автомобилю остаться на заданной водителем траектории.
Одновременно с работой ESP по стабилизации курса критически важным становится обеспечение видимости в направлении движения. Адаптивная система головного света (AFS или аналоги) получает информацию о скорости автомобиля, угле поворота рулевого колеса и иногда данных навигации. Основываясь на этом, фары динамически поворачиваются в сторону поворота еще до того, как автомобиль полностью в него вошел. Это происходит не хаотично, а синхронизированно с маневром, инициированным водителем и корректируемым ESP.
Преимущества синхронизированной работы
Совместная и скоординированная работа ESP и адаптивного света в поворотах дает водителю существенные преимущества:
- Упреждающее освещение траектории: Фары поворачиваются вслед за рулем, освещая именно ту часть дороги, куда направляется автомобиль после стабилизации ESP, а не обочину или встречную полосу.
- Повышенная безопасность: Освещение реальной траектории движения позволяет вовремя заметить препятствия, неровности или пешеходов в крутом повороте, что особенно критично в темное время суток или в условиях плохой видимости.
- Улучшенный контроль и уверенность: Водитель видит дорогу перед собой в повороте, а не темноту, что снижает стресс и позволяет точнее контролировать автомобиль, особенно на незнакомых дорогах.
- Плавность маневра: Синхронизация обеспечивает естественное продолжение маневра: стабилизация (ESP) -> освещение пути (AFS) -> выполнение поворота под контролем водителя.
- Снижение усталости: Отсутствие необходимости "искать" взглядом дорогу в темноте поворота и постоянная борьба с заносом уменьшают нагрузку на водителя.
Таким образом, ESP и адаптивный головной свет, работая в тесной синхронной связке, создают идеальные условия для безопасного и контролируемого прохождения резких поворотов. ESP обеспечивает физическую стабильность автомобиля на дороге, в то время как адаптивный свет гарантирует визуальную информативность, освещая путь точно по новой, стабилизированной траектории движения. Эта интеграция превращает две отдельные системы в единого, мощного электронного помощника, максимально повышающего безопасность в сложных дорожных ситуациях.
Система курсовой устойчивости в автопоездах: особенности работы
Применение систем курсовой устойчивости (ESC) в автопоездах (тягач с одним или несколькими прицепами) принципиально сложнее, чем в одиночных транспортных средствах, из-за многозвенной конструкции и уникальных динамических характеристик. Основная задача ESC в автопоезде – предотвратить опасные ситуации, специфичные для сочлененных транспортных средств, такие как складывание (jackknifing), раскачивание прицепа (trailer swing) или опрокидывание всего состава.
Система должна непрерывно анализировать не только поведение тягача (угол поворота руля, скорость, поперечное ускорение, рыскание), но и критически важные параметры прицепа(ов): угол дышла (articulation angle), поперечное ускорение прицепа, его рыскание и крен. Для этого используются дополнительные датчики, установленные на дышле прицепа и часто внутри самого прицепа, передающие данные в центральный блок управления системы тягача по специальным интерфейсам (например, CAN-шина прицепа).
Ключевые особенности и алгоритмы работы ESC в автопоездах

Алгоритмы ESC для автопоездов разрабатываются с учетом их специфической динамики:
- Предотвращение Складывания (Jackknifing): Наиболее опасная ситуация, когда прицеп "складывается" относительно тягача под острым угол, теряя управляемость и стабильность. ESC распознает начало этого процесса по резкому увеличению угла дышла и неадекватной реакции тягача на рулевое управление. Система мгновенно:
- Тормозит внешние колеса тягача: Для создания стабилизирующего момента, "вытягивающего" тягач в прямую линию относительно прицепа.
- Снижает крутящий момент двигателя: Для уменьшения сил, провоцирующих складывание.
- Активирует тормоза прицепа: Современные системы могут избирательно задействовать тормоза на колесах прицепа для дополнительного стабилизирующего воздействия.
- Подавление Раскачивания Прицепа (Trailer Sway Mitigation - TSM или Trailer Swing): Возникает при резких маневрах, порывах ветра или неравномерной загрузке прицепа. ESC обнаруживает нарастающие колебания прицепа относительно тягача по данным датчиков рыскания и угла дышла. Система гасит колебания:
- Избирательным торможением колес тягача: Чаще всего тормозит колесо, противоположное направлению раскачивания прицепа, создавая стабилизирующий момент.
- Коррекцией тяги двигателя.
- Повышенная Инерционность и Запаздывание Реакции: Из-за большой массы и длины автопоезда его реакция на управляющие воздействия (торможение, поворот) происходит с заметным запаздыванием. Алгоритмы ESC должны прогнозировать развитие опасной ситуации и начинать вмешательство раньше и плавнее, чем в легковом автомобиле, чтобы избежать резких, дестабилизирующих рывков.
- Интеграция с Пневматической Тормозной Системой: В отличие от легковых авто с гидравликой, тормоза грузовиков и прицепов чаще всего пневматические. ESC должна эффективно взаимодействовать с модуляторами АБС/ЕБД и пневмоклапанами, обеспечивая точное и быстрое дозирование тормозного усилия на каждом колесе большой массы.
- Работа с Многозвенными Составами (B-Doubles, Road Trains): Для автопоездов с двумя и более прицепами алгоритмы становятся исключительно сложными. Система должна контролировать углы между всеми звеньями (угол дышла первого прицепа, угол между первым и вторым прицепами) и координировать тормозные усилия на всех осях всего состава для предотвращения складывания или "хлыстового" эффекта. Используются специализированные функции (Roll Over Prevention для опрокидывания, Lane Support System для удержания полосы).
- Учет Загрузки: Система часто интегрируется с датчиками нагрузки на оси или использует косвенные методы оценки массы и центра тяжести автопоезда, так как эти параметры критически влияют на его устойчивость. Алгоритмы адаптируются под текущую загрузку.
| Аспект | Легковой автомобиль | Автопоезд (Тягач + Прицеп) |
|---|---|---|
| Основная угроза | Занос, снос осей | Складывание, раскачивание прицепа, опрокидывание состава |
| Ключевые контролируемые параметры | Рыскание, поперечное ускорение тягача, угол поворота руля | Рыскание тягача и прицепа, угол дышла, поперечное ускорение тягача и прицепа, крен |
| Сложность динамики | Относительно простая | Высокая (нелинейная, многозвенная система с запаздыванием) |
| Тип тормозной системы | Гидравлическая | Пневматическая (требует специнтеграции) |
| Вмешательство | Избирательное торможение колес тягача + коррекция тяги | Избирательное торможение колес тягача + коррекция тяги + избирательное торможение колес прицепа |
| Алгоритмы | Стандартные ESC | Специализированные (TSM, ROP, LSS) для автопоездов |
Как ESC помогает сохранить траекторию при боковом ветре на трассе
Боковой ветер на трассе создает внезапную боковую нагрузку на кузов, вызывая смещение автомобиля с заданной траектории. Это особенно опасно при высоких скоростях или резких порывах, когда водитель может не успеть среагировать корректирующими действиями руля для компенсации сноса.
Система ESC постоянно отслеживает угол поворота руля, боковое ускорение и скорость вращения каждого колеса через датчики. При обнаружении несоответствия между фактической траекторией (вызванной ветром) и направлением, заданным рулевым управлением, она мгновенно вычисляет необходимые корректирующие меры.
Алгоритм работы ESC при боковом ветре
- Фиксация отклонения: Датчик рыскания регистрирует начало вращения кузова вокруг вертикальной оси (занос).
- Анализ данных: Блок управления сравнивает показания рулевого угла, скорости колес и бокового ускорения.
- Точечное торможение: Система притормаживает одно или несколько колес:
- При сносе передней оси – колесо, противоположное направлению ветра.
- При заносе задней оси – колесо в направлении ветра.
- Стабилизация курса: Создаваемый тормозной момент возвращает автомобиль на исходную траекторию без потери управляемости.
Ключевое преимущество ESC – скорость реакции (до 20 раз быстрее человека) и дозированное воздействие, предотвращающее ритмический занос. Система не допускает блокировки колес, сохраняя контроль над сцеплением с дорогой.
| Без ESC | С ESC |
|---|---|
| Ручная коррекция рулем с запаздыванием | Автоматическое торможение отдельных колес за 0.05-0.1 сек |
| Риск перекрута руля и потери управления | Точное импульсное воздействие без блокировки колес |
| Возможность развития ритмического заноса | Подавление вращения кузова на начальной стадии |
Обучение новой электроники после замены блока управления ESP
После установки нового блока ESP критически важно провести процедуру обучения электронных систем автомобиля. Без этого ключевые функции курсовой стабилизации могут работать некорректно или быть полностью неактивными, что создает риски при движении. Обучение синхронизирует блок с датчиками и исполнительными механизмами, обеспечивая точность обработки данных о скорости, угле поворота руля и боковых ускорениях.
Процедура требует использования специализированного диагностического оборудования (например, Bosch KTS, Delphi DS, OEM-сканеров производителя). Механик активирует калибровку через ПО сканера, соблюдая строгую последовательность операций. Автомобиль при этом должен находиться на ровной поверхности с исправным напряжением бортовой сети.
Этапы проведения обучения
Основные шаги процедуры включают:
- Инициализацию блока ESP – регистрация модуля в сети CAN.
- Калибровку датчика угла поворота руля – установка нулевого положения при прямолинейном движении.
- Адаптацию датчиков продольного/поперечного ускорения – считывание эталонных показателей в статичном положении.
- Тест исполнительных механизмов – проверка насоса и клапанов АБС/ESP под контролем ПО.
| Параметр | Требование | Последствия ошибки |
| Уровень напряжения | Не ниже 12.5 В | Сброс процесса обучения |
| Температура тормозной жидкости | Менее 60°C | Некорректная работа АБС |
| Состояние шин | Одинаковый износ/давление | Ложные срабатывания ESP |
После завершения обязательно проводится тест-драйв для верификации функций: принудительно вызывается срабатывание ESP на безопасном участке. Система должна кратковременно подтормаживать колеса и возвращать авто на траекторию без загорания контрольной лампы на панели приборов.
Экстренное маневрирование: шаг за шагом действия системы
При резком объезде препятствия или экстренном перестроении система курсовой стабилизации непрерывно анализирует поведение автомобиля через сеть датчиков. Она сравнивает фактическую траекторию с расчетной моделью движения, основанной на угле поворота руля и скорости, мгновенно выявляя начало потери контроля.
Блок управления активирует алгоритм стабилизации за 20-150 миллисекунд, предотвращая развитие заноса или сноса. Система координирует работу тормозных механизмов и дроссельной заслонки, обеспечивая предсказуемую динамику даже на пределе сцепления шин с дорогой.
- Фиксация несоответствия
Датчики угла поворота руля, угловой скорости и поперечных ускорений регистрируют расхождение между действиями водителя и реальным вектором движения автомобиля. - Выбор целевого колеса
ЭБУ вычисляет, какое колесо требует подтормаживания для создания стабилизирующего момента. При сносе передней оси тормозятся задние колёса, при заносе – передние по внешнему радиусу поворота. - Точечное торможение
Гидравлический модулятор создает давление в тормозной магистрали выбранного колеса без участия водителя. Сила торможения дозируется с точностью до 5 бар. - Коррекция тяги
Параллельно система подает команду блоку управления двигателем на снижение крутящего момента. Дроссельная заслонка прикрывается, а в автоматических КПП может инициироваться переход на пониженную передачу. - Демпфирование колебаний
При сохранении нестабильности система циклически повторяет этапы 2-4, гася колебания кузова. Интервалы между импульсами торможения сокращаются по мере роста амплитуды заноса. - Возврат управления
После стабилизации курса электроника плавно снижает тормозное усилие и восстанавливает подачу топлива. Водитель получает полный контроль без рывков или блокировки колёс.
Важно: система корректирует только поперечное скольжение, не заменяя действия водителя при прямолинейном торможении. Эффективность напрямую зависит от остаточной силы сцепления шин и исправности компонентов ABS.
Преимущества ESP-Pro системы с индивидуальным торможением колес
Система ESP-Pro обеспечивает превосходный контроль над траекторией движения благодаря точечному управлению тормозным усилием на каждом колесе независимо. Эта технология мгновенно анализирует данные с датчиков и корректирует поведение автомобиля в критических ситуациях, компенсируя ошибки водителя или неожиданные изменения дорожного покрытия.
Индивидуальное торможение колес создает направленное противодействие заносам и сносам, формируя необходимый вращающий момент вокруг вертикальной оси кузова. Это позволяет сохранять курсовую устойчивость даже при резких маневрах на высокой скорости или при экстренном объезде препятствия, когда рулевое управление уже неэффективно.
Ключевые эксплуатационные преимущества
- Стабилизация при разгоне: Предотвращает пробуксовку ведущих колес на льду или мокром асфальте за счет избирательного подтормаживания
- Коррекция избыточной поворачиваемости: При заносе задней оси притормаживает внешнее переднее колесо, возвращая авто на траекторию
- Нейтрализация недостаточной поворачиваемости: При сносе передних колес замедляет внутреннее заднее колесо, усиливая поворот
- Повышение эффективности экстренного торможения: Оптимизирует распределение тормозных сил с учетом нагрузки на оси
| Ситуация | Действие ESP-Pro | Результат |
|---|---|---|
| Резкий объезд препятствия | Притормаживание заднего внутреннего колеса | Снижение риска вращения и сохранение управляемости |
| Скольжение в повороте | Дифференцированное торможение колес внешней дуги | Стабилизация курса без потери скорости |
| Торможение на разнородном покрытии | Корректировка усилий для каждого колеса | Минимизация тормозного пути и отсутствие рыскания |
Система интегрируется с электроусилителем руля, обеспечивая корректирующие импульсы на рулевом колесе для интуитивного понимания водителем оптимальной траектории. В отличие от базовых ESP, индивидуальное торможение колес в ESP-Pro работает на всех скоростях – от маневрирования на парковке до движения по автомагистрали.
Защита от переворота в микроавтобусах и коммерческом транспорте
Высокий центр тяжести микроавтобусов и коммерческих фургонов существенно повышает риск опрокидывания при резких маневрах, крутых поворотах или экстренном торможении. Этот риск усугубляется неравномерной загрузкой грузового отсека или смещением пассажиров в салоне, что может критически нарушить устойчивость транспортного средства даже на умеренных скоростях.
Система курсовой стабилизации (ESP) непрерывно анализирует данные с датчиков: угла поворота руля, поперечного ускорения и скорости вращения каждого колеса. При обнаружении малейших признаков потери устойчивости (например, начало заноса задней оси или сноса передней) система мгновенно вмешивается, избирательно притормаживая отдельные колеса и корректируя крутящий момент двигателя. Это позволяет "прижать" автомобиль к траектории и предотвратить развитие опасного бокового скольжения, ведущего к опрокидыванию.
Ключевые механизмы предотвращения переворота
- Избирательное торможение колес: ESP принудительно замедляет конкретное колесо (чаще всего внутреннее заднее при повороте), создавая стабилизирующий момент силы, противодействующий опрокидыванию.
- Контроль тяги двигателя: Система дозирует мощность, передаваемую на ведущие колеса через ЭБУ двигателя, предотвращая пробуксовку и потерю сцепления, особенно критичную на скользком покрытии или при подъеме в гору с грузом.
- Подавление колебаний: При возникновении опасных раскачиваний кузова (например, после объезда препятствия) ESP гасит эти колебания серией коротких тормозных импульсов, стабилизируя положение авто.
| Фактор риска | Действие ESP | Результат |
|---|---|---|
| Резкий поворот руля ("лосиный тест") | Торможение внешних колес, снижение тяги | Подавление избыточной поворачиваемости, сохранение траектории |
| Скользкое покрытие в повороте | Компенсация сноса передней/задней оси | Предотвращение вращения или выезда на встречную полосу |
| Смещение груза/пассажиров | Коррекция кренов точечным торможением | Снижение крена кузова, сохранение контакта колес с дорогой |
Эффективность ESP подтверждается статистикой: исследования Euro NCAP и NHTSA показывают снижение риска фатальных ДТП с переворотом для коммерческого транспорта на 40-60%. Система работает превентивно, часто исправляя ошибки водителя еще до того, как ситуация становится критической, что особенно важно при перевозке людей или ценных грузов.
Роль датчика поперечного ускорения в расчете угла крена кузова
Датчик поперечного ускорения измеряет величину боковых сил, действующих на автомобиль в поворотах или при резких маневрах. Он фиксирует физическое ускорение вдоль горизонтальной оси, перпендикулярной направлению движения. Эти данные отражают интенсивность центробежной силы, возникающей при изменении траектории.
На основе показаний датчика блок управления ESC вычисляет фактический угол крена кузова. Алгоритм преобразует измеренное поперечное ускорение в угловое отклонение, используя динамические модели подвески и параметры центра тяжести автомобиля. Чем выше зафиксированное ускорение – тем значительнее расчетный крен.
Ключевые аспекты взаимодействия
Точность датчика критична: даже минимальная погрешность в 0.1g приводит к ошибке расчета крена до 3-5°, что искажает работу стабилизации. Система сопоставляет его данные с показаниями других сенсоров:
- Датчика угловой скорости (определяет скорость крена)
- Датчиков положения колес (анализируют разницу скоростей вращения)
- Датчика рулевого угла (оценивает намерения водителя)
При расхождении показателей система распознает потерю устойчивости. Например, если датчик ускорения фиксирует высокую боковую силу, а датчик руля показывает минимальный угол поворота – это указывает на занос.
| Показатель датчика | Влияние на расчет крена |
|---|---|
| Нулевое ускорение | Крен отсутствует (прямолинейное движение) |
| Плавный рост 0.2-0.4g | Умеренный крен (штатный поворот) |
| Резкий скачок >0.6g | Критический крен (риск опрокидывания) |
Полученный угол крена – основа для превентивного вмешательства ESC. При приближении к пороговым значениям система:
- Автономно подтормаживает отдельные колеса
- Корректирует крутящий момент двигателя
- Активирует активные стабилизаторы (если установлены)
Система Roll Stability Control и ее взаимодействие с ESC
Система Roll Stability Control (RSC) специализируется на предотвращении опрокидывания автомобиля при резких маневрах или движении по пересеченной местности. Она анализирует поперечное ускорение, угол крена кузова и скорость автомобиля через гироскопические датчики. При обнаружении критического крена RSC автоматически снижает мощность двигателя и притормаживает отдельные колеса, создавая стабилизирующий момент.
Взаимодействие RSC с системой ESC (Electronic Stability Control) основано на постоянном обмене данными через единый электронный блок управления. ESC контролирует поперечную динамику, предотвращая занос, а RSC дополняет ее, фокусируясь на вертикальной устойчивости. При комплексных авариях (например, занос с риском опрокидывания) системы координируют тормозные усилия и дросселирование, синхронизируя коррекцию траектории и положения кузова.
Принципы совместной работы систем
- Иерархия реагирования: ESC первично корректирует занос, а RSC активируется при угрозе крена >5°
- Интеграция датчиков: Общее использование акселерометров, датчиков рулевого угла и скорости колес
- Алгоритмы безопасности: При экстренном маневре RSC временно ограничивает вмешательство ESC для предотвращения резкого крена
- Компенсация нагрузок: При торможении в повороте RSC распределяет усилия на колеса с учетом данных ESC о боковом ускорении
| Ситуация | Действие ESC | Действие RSC |
|---|---|---|
| Резкий объезд препятствия | Торможение внешних колес для сохранения траектории | Снижение крутящего момента и торможение передних колес для уменьшения крена |
| Занос на скользком покрытии | Выборочное торможение колес для коррекции курса | Мониторинг угла крена и подготовка к активации |
| Крутой поворот на высокой скорости | Контроль бокового скольжения | Динамическое ограничение мощности до стабилизации кузова |
Ключевое преимущество симбиоза RSC и ESC – прогнозирующее воздействие: системы вычисляют риск опрокидывания по изменению центробежной силы и вектора движения за 0.5-1 сек до критического события. Такая координация снижает вероятность ДТП с переворотом на 24% согласно исследованиям NHTSA.
Эволюция технологий: от первых систем Bosch до современной ESP 9
Первые шаги в области электронной стабилизации начались с антиблокировочной системы тормозов (ABS), разработанной Bosch в 1978 году. Она предотвращала блокировку колёс при экстренном торможении, сохраняя управляемость. В 1986 году компания представила систему контроля тяги (ASR), которая минимизировала пробуксовку ведущих колёс за счёт управления крутящим моментом двигателя и подтормаживания буксующих колёс. Эти технологии заложили фундамент для более сложных решений.
Прорывом стало создание в 1995 году электронной программы стабилизации (ESP®), объединившей функциональность ABS и ASR с датчиками угла поворота руля и поперечного ускорения. Система непрерывно анализировала данные о движении автомобиля и сравнивала их с действиями водителя. При отклонении от заданной траектории (например, в заносе) ESP мгновенно подтормаживала отдельные колёса и корректировала работу двигателя, возвращая машину на курс без участия человека.
Путь к ESP 9
Эволюция ESP Bosch прошла через несколько поколений, где каждое улучшало:
- Быстродействие – сокращение времени реакции с 60 мс до 10 мс
- Точность – интеграция гироскопов и акселерометров нового поколения
- Функциональность – добавление модулей для работы с гибридными/электрическими трансмиссиями
Современная ESP® 9.3 (2020) использует:
- Радарные и камерные данные для превентивного срабатывания
- Алгоритмы машинного обучения для прогнозирования потери сцепления
- Электрогидравлический усилитель iBooster для экстренного торможения без нажатия педали
| Система | Год | Ключевое новшество |
| ABS 2 | 1978 | Базовое предотвращение блокировки колёс |
| ASR | 1986 | Контроль тяги при разгоне |
| ESP 5.7 | 2009 | Интеграция с адаптивным круиз-контролем |
| ESP 9.3 | 2020 | Поддержка автономного вождения и V2X-коммуникации |
Сегодня ESP 9 взаимодействует с другими системами автомобиля через единую сеть CAN, обеспечивая комплексную безопасность. Например, при риске переворота она координирует работу подвески и стабилизаторов, а в поворотах подключает векторное распределение тормозных усилий. Благодаря совместимости с электрифицированными силовыми установками, система способна рекуперировать энергию торможения без потери эффективности стабилизации.
Юридические требования: обязательная установка ESC в новых автомобилях
Стремясь радикально повысить безопасность дорожного движения, законодатели во многих странах ввели обязательные нормативы для автопроизводителей. Эти требования напрямую затрагивают систему курсовой стабилизации (ESC), превращая её из опции в стандартное оснащение для новых транспортных средств.
Юридические рамки предписывают обязательное оснащение ESC всех новых легковых автомобилей и легкого коммерческого транспорта, продаваемых на рынке. Это правило распространяется как на импортные, так и на отечественные модели, выпущенные после установленной нормативом даты. Контроль за соблюдением возложен на национальные органы по сертификации и надзору.
Ключевые аспекты регулирования
- Глобальные сроки введения:
- США: Обязательна для 100% моделей с сентября 2011 года.
- ЕС: Требование для всех новых легковых авто с ноября 2014 года.
- Россия: Включена в Технический регламент Таможенного союза (с 2016 г. для новых типов, с 2018 г. - для всех новых автомобилей).
- Стандарты соответствия: Система ESC должна соответствовать строгим международным нормам (например, FMVSS 126 в США, UN ECE R13H в Европе), подтвержденным официальными испытаниями.
- Сертификация: Без успешных испытаний ESC и получения сертификата соответствия, автомобиль не может быть допущен к продаже на территории стран, где действуют данные требования.
- Ответственность: Производители несут полную ответственность за соответствие своих автомобилей законодательству, включая штрафы и отзывные кампании при нарушениях.
Законодательное закрепление обязательности ESC стало мощным катализатором для её повсеместного внедрения. Это напрямую привело к значительному снижению количества ДТП, связанных с заносами и потерей управления, подтверждая статус системы как фундаментального элемента современной пассивной и активной безопасности автомобиля.
Перспективы развития: интеграция ESP с автопилотом и навигацией
Интеграция системы ESP с развивающимися технологиями автопилота представляет собой логичный и критически важный шаг в эволюции активной безопасности. ESP, с её способностью мгновенно воздействовать на тормоза отдельных колес и управлять крутящим моментом двигателя, является идеальным "исполнительным органом" для систем автономного вождения. Автопилот, опираясь на данные многочисленных сенсоров (камеры, лидары, радары), формирует стратегию движения, а ESP обеспечивает её точную и безопасную реализацию в сложных дорожных условиях, предотвращая потерю управляемости при маневрах или на скользком покрытии, которые могут быть инициированы автоматикой.
Ещё более значительный прорыв ожидается при глубокой интеграции ESP с системами навигации и картографирования высокого разрешения (HD Maps). Получая информацию о предстоящем маршруте, включая кривизну поворотов, перепады высот, тип покрытия и даже прогноз погоды, ESP может перейти от реактивного к проактивному режиму работы. Система сможет заранее адаптировать свои алгоритмы и подготовить исполнительные механизмы к конкретным условиям предстоящего участка дороги, например, предварительно подтормаживая перед крутым виражом или оптимизируя распределение крутящего момента на подъеме.
Ключевые направления интеграции
- Обмен данными в реальном времени: Бесшовная коммуникация между блоком управления ESP, автопилотом и навигационным блоком для согласованного принятия решений.
- Использование HD Maps и прогнозов: Адаптация алгоритмов стабилизации на основе точных данных о геометрии дороги, покрытии и погодных условиях на несколько километров вперед.
- Преимущественное управление ESP: Наделение ESP приоритетом в критических ситуациях, даже если автопилот активен, для гарантированного сохранения устойчивости.
- Обучение и адаптация: Использование машинного обучения для оптимизации работы ESP на конкретном автомобиле и типичных маршрутах, учитывая стиль вождения (даже при активном автопилоте) и износ компонентов.
| Аспект | Текущая ESP | ESP + Автопилот + Навигация |
|---|---|---|
| Реакция | Реактивная (на возникшую ситуацию) | Проактивная (на основе прогноза) |
| Источник данных | Собственные датчики (ABS, yaw rate, акселерометр) | Датчики ESP + сенсоры автопилота + HD Maps + онлайн-данные |
| Безопасность при автовождении | Обеспечивает базовую стабильность | Гарантирует стабильность при выполнении автономных маневров в любых условиях |
| Эффективность | Оптимизация сцепления "здесь и сейчас" | Оптимизация движения на участке (торможение, разгон, расход) |
Таким образом, интеграция ESP с автопилотом и навигационными системами трансформирует её из системы аварийного вмешательства в ключевой компонент комплексного интеллектуального управления автомобилем. Это позволит не только значительно повысить безопасность при использовании функций автономного вождения, особенно в нештатных ситуациях или на сложной дороге, но и оптимизировать сам процесс движения, повышая комфорт, предсказуемость и эффективность. ESP станет "умными мышцами" автомобиля, точно выполняющими команды "мозга" (автопилота), подкрепленные "предвидением" (навигацией).
Список источников
Система курсовой стабилизации (ESC, ESP) активно предотвращает заносы и потерю управляемости, анализируя данные с датчиков и корректируя тормозное усилие на отдельных колесах. Эта технология стала обязательным элементом активной безопасности современных автомобилей, существенно снижая риск аварий в сложных дорожных условиях.
Как идеальный электронный помощник, ESC работает незаметно для водителя, компенсируя ошибки руления или резкие маневры на скользком покрытии. Система особенно критична при экстренном объезде препятствий и прохождении поворотов на высокой скорости, сохраняя траекторию движения без человеческого вмешательства.
- ГОСТ Р 41.13-2007 "Единообразные предписания, касающиеся сертификации легковых автомобилей относительно торможения"
- Босх, "Автомобильный справочник" (раздел "Системы динамической стабилизации")
- SAE Technical Paper 2003-01-0105: "Эффективность электронного контроля устойчивости в реальных авариях"
- Исследование NHTSA (Национальное управление безопасности дорожного движения США): "Влияние ESC на снижение смертности в ДТП"
- Журнал "Авторевю", №4/2020: "Эволюция систем стабилизации: от ABS до интегрированного управления"
- Учебное пособие МАДИ "Активные системы безопасности автомобиля" (глава 3)
- Техническая документация Bosch ESP® 9.3