Расчет устойчивости и управляемости автомобиля для безопасного движения
Статья обновлена: 28.02.2026
Безопасность дорожного движения напрямую зависит от способности автомобиля сохранять заданную траекторию движения при различных воздействиях.
Устойчивость определяет сопротивление автомобиля опрокидыванию и заносу, особенно критична при экстренных маневрах и торможении на сложных покрытиях.
Управляемость обеспечивает точное реагирование на действия водителя, позволяя контролировать вектор движения в динамически меняющихся условиях.
Точный расчет этих характеристик на этапе проектирования и эксплуатации создает основу для предотвращения аварийных ситуаций и минимизации рисков.
Центр тяжести автомобиля и его влияние на стабильность
Центр тяжести (ЦТ) автомобиля – точка приложения равнодействующей сил тяжести всех его компонентов. Расположение ЦТ относительно колесной базы и дорожного покрытия определяет распределение вертикальной нагрузки на оси, что напрямую влияет на сцепление шин с дорогой, характер управляемости и склонность к опрокидыванию. Чем выше ЦТ над поверхностью, тем значительнее момент сил при боковых ускорениях или торможении, снижая запас устойчивости.
Продольное смещение ЦТ (к передней/задней оси) изменет развесовку по осям: смещение вперед повышает нагрузку на передние колеса, улучшая управляемость, но увеличивая риск сноса передней оси. Смещение назад усиливает нагрузку на заднюю ось, что может спровоцировать избыточную поворачиваемость. Поперечная асимметрия ЦТ вызывает неравномерное распределение нагрузки на левые/правые колеса, ухудшая курсовую устойчивость в поворотах.
Ключевые аспекты влияния ЦТ на устойчивость
Высота центра тяжести:
- Низкий ЦТ (спортивные авто): снижает крен в поворотах, повышает критическое ускорение для опрокидывания.
- Высокий ЦТ (внедорожники, грузовики): увеличивает угол крена и риск потери устойчивости на уклонах или при резких маневрах.
Расчет статической устойчивости: Условие против опрокидывания:
amax = g × (0.5 × B) / hцт, где
B – колея, hцт – высота ЦТ, g – ускорение свободного падения.
| Параметр ЦТ | Влияние на торможение | Влияние на поворот |
|---|---|---|
| Высокое положение | Риск продольного опрокидывания при резком торможении на уклоне | Снижение критической скорости входа в поворот на 15-25% |
| Переднее смещение | Улучшение сцепления передних колес (+) | Склонность к недостаточной поворачиваемости |
| Заднее смещение | Повышение риска блокировки задних колес | Склонность к избыточной поворачиваемости |
Динамические последствия: При экстренном торможении смещение ЦТ вперед разгружает задние колеса, сокращая тормозной путь на 10-15% при правильной развесовке. В повороте высота ЦТ определяет величину кренящего момента: увеличение hцт на 20% снижает допустимую скорость прохождения виража на 8-12%.
Роль шин в обеспечении сцепления с дорожным покрытием
Шина является единственным элементом автомобиля, непосредственно контактирующим с дорожной поверхностью. Качество этого контакта определяет величину сил сцепления, которые передаются через пятно контакта и влияют на все аспекты управляемости: разгон, торможение, повороты. Сцепление возникает благодаря трению и молекулярному взаимодействию резиновой смеси протектора с микронеровностями покрытия.
Эффективность передачи сил зависит от состояния шины (износ протектора, давление, температура), свойств резиновой смеси, рисунка протектора, а также от характеристик самого дорожного покрытия (сухое/мокрое, асфальт/лед, чистота). Недостаточное сцепление приводит к проскальзыванию колес (буксованию при разгоне, блокировке при торможении) или боковому уводу, что напрямую снижает устойчивость и управляемость.
Факторы влияния на сцепные свойства шин
Ключевые параметры, определяющие способность шины обеспечивать надежное сцепление:
- Состав резиновой смеси: Современные смеси оптимизируются под разные условия (летние, зимние, всесезонные). Зимние шины содержат больше кремнезема и остаются эластичными при низких температурах, улучшая сцепление на снегу и льду.
- Глубина и рисунок протектора: Канавки отводят воду, снежную кашу и грязь из пятна контакта, предотвращая аквапланирование. Износ протектора ниже установленного минимума (обычно 1.6 мм) резко ухудшает сцепление, особенно на мокрой дороге.
- Давление воздуха: Отклонение от нормы, рекомендованной автопроизводителем, деформирует пятно контакта. Недокачанные шины увеличивают площадь контакта, но перегреваются и неравномерно изнашиваются. Перекачанные – уменьшают площадь контакта, снижая сцепление.
- Температура шины: Рабочая температура влияет на эластичность резины. Холодные шины (особенно летние зимой) "дубеют", горячие (при агрессивной езде) могут перегреться и "поплыть".
- Нагрузка на колесо: Увеличение нагрузки (при повороте, перевозке груза) требует большего сцепления для передачи сил без проскальзывания.
Последствия недостаточного сцепления для устойчивости:
- При торможении: Блокировка колес (при отсутствии ABS) приводит к потере управляемости и увеличению тормозного пути. Риск юза и заноса.
- При разгоне: Пробуксовка ведущих колес вызывает потерю курсовой устойчивости (особенно на переднеприводных автомобилях).
- В повороте: Превышение боковой силы сцепления ведет к сносу передней или заносу задней оси. Неравномерное сцепление колес на одной оси (разные шины, давление, износ) провоцирует рывки и потерю контроля.
Таблица: Влияние состояния шин на параметры устойчивости
| Параметр шины | Ухудшение параметра | Влияние на устойчивость и управляемость |
|---|---|---|
| Глубина протектора | Ниже 3-4 мм (мокрая дорога), ниже 1.6 мм (незаконно) | Резко возрастает риск аквапланирования, увеличивается тормозной путь на мокрой дороге, ухудшается курсовая устойчивость |
| Давление воздуха | Слишком низкое или слишком высокое | Ухудшение реакции на рулевое управление, повышенный износ, риск деформации/разрыва, снижение эффективности торможения и прохождения поворотов |
| Равномерность износа | Разный износ на колесах одной оси | Автомобиль уводит в сторону, неравномерное торможение, повышенная склонность к заносу, вибрации |
| Совместимость шин | Разные модели, типы или степень износа на одной оси | Различия в сцепных свойствах и жесткости приводят к неустойчивому поведению, особенно в экстренных маневрах |
Таким образом, исправные шины с оптимальными характеристиками для текущих условий являются фундаментальным условием реализации расчетных показателей устойчивости и управляемости автомобиля, заложенных конструкторами, и ключевым фактором активной безопасности водителя и пассажиров.
Система подвески: конструктивные особенности для устойчивости
Конструкция подвески критически влияет на способность автомобиля сохранять контакт колес с дорожным покрытием при движении по неровностям и в поворотах, что является основой устойчивости. Она определяет характер изменения развала и схождения колес, величину кренов кузова, эффективность работы шин и, как следствие, уровень сцепления с дорогой.
Ключевые параметры геометрии подвески – плечо обкатки, поперечный и продольный наклон оси поворота колеса – напрямую воздействуют на стабилизирующий момент при торможении и разгоне, а также на поведение автомобиля в поворотах. Оптимизация этих параметров позволяет минимизировать нежелательные отклонения траектории и сохранять управляемость в критических режимах.
Основные конструктивные элементы и их влияние
Эффективность подвески в обеспечении устойчивости определяется взаимодействием нескольких ключевых компонентов:
- Рычаги и направляющий аппарат: Конфигурация (двухрычажная, McPherson, многорычажная) задает кинематику колеса. Многорычажные системы обеспечивают точное поддержание оптимального развала колес в ходу и при крене.
- Стабилизатор поперечной устойчивости: Жестко связывает колеса одной оси, уменьшая крен кузова в поворотах за счет перераспределения вертикальной нагрузки. Повышает поворачиваемость на входе в поворот.
- Пружины и упругие элементы: Жесткость пружин определяет величину хода подвески, скорость переноса веса и склонность к раскачиванию. Повышенная жесткость снижает крен, но ухудшает комфорт и сцепление на неровностях.
- Амортизаторы (демпферы): Контролируют скорость колебаний пружин, гасят раскачку кузова после проезда неровностей или маневров. Эффективные амортизаторы предотвращают отрыв колес от дороги и потерю управляемости.
- Опорные подшипники и сайлентблоки: Обеспечивают необходимую подвижность соединений с контролируемой эластокинематикой, влияя на изменение схождения при ходах сжатия/отбоя и торможении.
Современные системы активно используют адаптивные элементы:
- Активные стабилизаторы: Меняют жесткость в реальном времени, снижая крен в поворотах без излишней жесткости на прямой.
- Адаптивные амортизаторы: Электронно регулируют демпфирование, оперативно адаптируясь к режиму движения и состоянию дороги.
- Пневмо/гидроподвески: Позволяют изменять клиренс и жесткость, оптимизируя устойчивость для разных скоростей и нагрузок.
Требования к подвеске для обеспечения устойчивости
| Требование | Конструктивное решение | Эффект на устойчивость |
|---|---|---|
| Минимизация крена | Стабилизаторы поперечной устойчивости, жесткие пружины | Снижение перераспределения нагрузки на внешние колеса в повороте, сохранение сцепления |
| Сохранение контакта колес | Оптимальное демпфирование (амортизаторы), независимая подвеска | Предотвращение отрыва колес от дороги на неровностях, сохранение управляемости |
| Стабильность траектории при торможении/разгоне | Эластокинематика подвески, продольная устойчивость рычагов | Подавление "клевков" и "приседаний", минимизация отклонения от курса |
| Управляемое изменение углов установки колес | Точная кинематика многорычажной подвески | Компенсация нежелательного схождения/развала при крене и ходах подвески |
Сбалансированность характеристик всех элементов подвески – жесткости, демпфирования, кинематики – является обязательным условием для достижения высокой устойчивости. Чрезмерное усиление одного параметра (например, креновой жесткости) без учета других может привести к ухудшению сцепления на реальном дорожном покрытии и снижению безопасности.
Динамика продольного перемещения при разгоне и торможении
При разгоне крутящий момент от двигателя передается через трансмиссию на ведущие колеса, создавая силу тяги. Эта сила преодолевает сопротивление качению, аэродинамическое сопротивление и инерцию массы автомобиля. Максимальное ускорение ограничено сцеплением шин с дорогой: при превышении предельного значения силы трения происходит пробуксовка колес, снижающая эффективность разгона и устойчивость.
Торможение сопровождается преобразованием кинетической энергии в тепловую посредством трения в тормозных механизмах. Сила торможения возникает между шинами и дорожным покрытием, завися от коэффициента сцепления. Критический фактор – равномерность распределения тормозных усилий между осями. Неравномерность вызывает риск блокировки колес, потерю управляемости (особенно на скользких поверхностях) и увеличение тормозного пути.
Ключевые аспекты устойчивости
Перераспределение вертикальных нагрузок на оси существенно влияет на сцепные свойства:
- При разгоне: нагрузка смещается на заднюю ось (у переднеприводных авто), снижая сцепление ведущих колес
- При торможении: до 90% нагрузки переносится на переднюю ось, повышая риск блокировки задних колес
Расчет продольной устойчивости требует анализа:
- Уравнения движения: \( m \cdot a = F_{\text{тяги}} - F_{\text{сопр}}} \) (разгон), \( m \cdot a = F_{\text{торм}}} - F_{\text{сопр}}} \) (торможение)
- Коэффициента сцепления: \( \varphi = \frac{F_{\text{торм (тяги)}}}{R_z} \), где \( R_z \) – реакция опорной поверхности
- Критического замедления: \( j_{\text{кр}}} = \varphi \cdot g \), где \( g \) – ускорение свободного падения
| Параметр | Разгон | Торможение |
|---|---|---|
| Риск потери устойчивости | Пробуксовка ведущих колес | Блокировка колес (юз) |
| Фактор безопасности | Запас по сцеплению ведущей оси | Равномерность блокировки осей |
| Системы стабилизации | TCS (Traction Control) | ABS + EBD |
Эффективное управление требует учета деформации шин и запаздывания реакций подвески. Резкое торможение на разнородных покрытиях провоцирует возникновение моментов рыскания, компенсируемых корректировкой рулевого управления и электронными системами стабилизации (ESP).
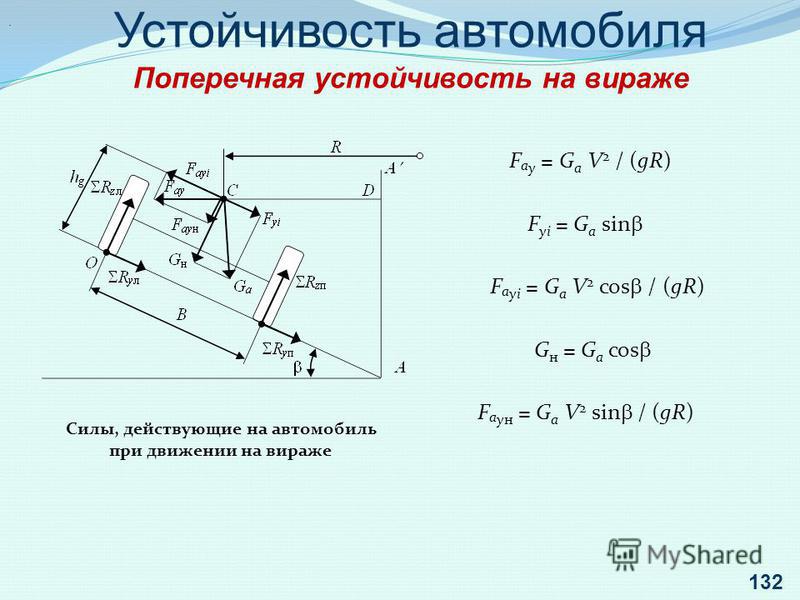
Поперечная устойчивость в поворотах: факторы риска
Основную опасность при прохождении поворотов представляет возникновение поперечного скольжения колес или опрокидывание автомобиля. Эти явления напрямую связаны с превышением критических величин центробежной силы, действующей перпендикулярно направлению движения. Центробежная сила возрастает пропорционально квадрату скорости и обратно пропорционально радиусу поворота, что делает высокоскоростные маневры на малых радиусах особо рискованными.
Нарушение сцепления шин с дорожным покрытием – ключевой механизм потери устойчивости. Когда результирующая сила, складывающаяся из центробежной силы и веса автомобиля, выходит за пределы конуса трения колес, происходит срыв в скольжение. Риск такого срыва существенно повышается при неблагоприятных внешних условиях и технических неисправностях.
Критические факторы риска
Основные факторы, снижающие поперечную устойчивость:
- Скорость движения: Превышение безопасной скорости для конкретного радиуса поворота – главная причина потери управляемости. Увеличение скорости вдвое повышает центробежную силу вчетверо.
- Состояние покрытия: Снижение коэффициента сцепления (гололед, мокрая дорога, грязь, песок, листва) резко уменьшает максимально возможную боковую силу удержания.
- Техническое состояние автомобиля:
- Шины: Износ протектора, несоответствие давления, смешанный рисунок или тип шин на осях.
- Подвеска: Изношенные амортизаторы, пружины, сайлентблоки не обеспечивают стабильного контакта колес с дорогой.
- Система рулевого управления: Люфты, заклинивания нарушают точность управления траекторией.
- Параметры загрузки:
- Высокий центр тяжести (пассажиры на крыше, высоко расположенный груз) увеличивает склонность к опрокидыванию.
- Неравномерное распределение груза по осям или смещение центра тяжести вбок нарушает баланс.
- Динамические воздействия: Резкое торможение или разгон в повороте, резкий поворот руля вызывают перераспределение нагрузок на колеса и могут спровоцировать срыв.
- Геометрия поворота: Уменьшение радиуса поворота (крутые виражи) или переходные участки (эстакады, съезды) требуют особого контроля скорости.
Расчет устойчивости включает определение критической скорости по условиям скольжения и опрокидывания:
| Условие потери устойчивости | Формула критической скорости (Vкр) |
|---|---|
| Скольжение | Vкр.ск = √(g * R * φy) |
| Опрокидывание | Vкр.опр = √(g * R * B / (2 * hg)) |
где: g – ускорение свободного падения, R – радиус поворота, φy – коэффициент поперечного сцепления, B – колея автомобиля, hg – высота центра тяжести.
Работа тормозной системы: распределение усилий по осям
При торможении автомобиля инерционные силы вызывают перераспределение вертикальных нагрузок между осями: передняя ось нагружается, задняя – разгружается. Величина изменения зависит от замедления, высоты центра масс и колесной базы. Это явление критично влияет на эффективность торможения и требует дифференцированного подхода к распределению тормозных моментов.
Оптимальное распределение усилий достигается, когда тормозные силы на осях пропорциональны действующим на них вертикальным реакциям. Нарушение этого соотношения приводит либо к преждевременной блокировке задних колес (при избыточном усилии), снижающей устойчивость, либо к недогрузке передних колес (при недостаточном усилии), увеличивающей тормозной путь. Современные системы (ABS, EBD) динамически корректируют баланс в реальном времени.
Ключевые факторы и методы расчета
Параметры, определяющие распределение:
- Коэффициент сцепления шин с дорогой (φ)
- Высота центра масс (hg)
- Координаты центра масс относительно осей (a, b)
- Колесная база (L = a + b)
- Ускорение свободного падения (g)
Формулы для расчета вертикальных реакций:
- На переднюю ось при торможении: Rf = (G * b / L) + (G * hg * j) / (g * L)
- На заднюю ось при торможении: Rr = (G * a / L) - (G * hg * j) / (g * L)
где G – вес автомобиля, j – замедление.
Оптимальное соотношение тормозных сил:
| Ось | Усилие (Fторм) | Условие отсутствия блокировки |
|---|---|---|
| Передняя | Ff = φ * Rf | Ff / Fr ≈ Rf / Rr |
| Задняя | Fr = φ * Rr |
Проблемы при отклонении от оптимума:
- Смещение баланса вперед: Задние колеса блокируются раньше передних, вызывая занос.
- Смещение баланса назад: Передние колеса не реализуют потенциал сцепления, увеличивая тормозной путь.
ABS: принцип действия для сохранения управляемости при торможении
Антиблокировочная система (ABS) предотвращает полную блокировку колёс при экстренном торможении, сохраняя кинетическое трение между шиной и дорожным покрытием. Блокировка колёс устраняет возможность управления направлением движения – автомобиль становится неуправляемым. ABS поддерживает колесо в режиме граничного скольжения, когда сила трения достигает максимума, но вращение не прекращается полностью.
Работа системы основана на непрерывном мониторинге скорости вращения каждого колеса датчиками. При резком замедлении одного из колёс (признак блокировки) электронный блок управления (ЭБУ) мгновенно снижает давление тормозной жидкости в соответствующем контуре. Это позволяет колесу восстановить вращение, после чего давление снова повышается. Цикл повторяется до 15 раз в секунду.
Ключевые аспекты сохранения управляемости
- Контроль вектора движения: вращающиеся колёса сохраняют сцепление с дорогой, позволяя водителю корректировать траекторию рулём даже при полностью выжатой педали тормоза.
- Адаптация к покрытию: ABS автоматически подстраивает тормозное усилие для разных условий (асфальт, лёд, гравий), минимизируя тормозной путь без потери контроля.
- Дифференцированное воздействие: Система обрабатывает данные с каждого датчика отдельно, что критично при торможении на разнородных поверхностях (например, левое колесо на асфальте, правое на льду).
| Фаза работы ABS | Действие системы | Влияние на управляемость |
|---|---|---|
| Обнаружение блокировки | Датчики фиксируют резкое падение скорости вращения колеса | Прерывает начало неконтролируемого скольжения |
| Сброс давления | Клапаны в гидроблоке временно снижают давление в тормозном механизме | Восстанавливает вращение колеса и сцепление с дорогой |
| Повторное нажатие | Давление повышается после возобновления вращения | Обеспечивает эффективное замедление без потери траекторной устойчивости |
Важно: ABS не сокращает тормозной путь на рыхлых поверхностях (снег, песок), где клин заблокированных колёс способствует быстрому замедлению. Однако даже в этих условиях система сохраняет приоритет – возможность маневрирования и предотвращение заноса.
Система курсовой устойчивости (ESP): алгоритмы корректировки траектории
ESP непрерывно анализирует данные датчиков: угла поворота руля, продольной/поперечной скорости, угловой скорости рыскания (yaw rate), давления в тормозной системе и углового ускорения. Система вычисляет теоретическую траекторию движения на основе модели "водитель-автомобиль-дорога", сравнивая её с фактическими параметрами в реальном времени. При обнаружении отклонений (например, разницы между заданным и реальным вектором рыскания) активируется алгоритм стабилизации.
Корректирующие воздействия реализуются через модулятор тормозных усилий и блок управления двигателем. ESP избирательно притормаживает отдельные колёса, создавая момент сил для противодействия заносу или сносу, параллельно регулируя крутящий момент силового агрегата. Это позволяет компенсировать потерю сцепления без вмешательства водителя, сохраняя траекторию в пределах кинематических возможностей автомобиля.
Этапы алгоритма корректировки
- Идентификация режима движения:
- Расчёт желаемого вектора движения по углу поворота руля и скорости
- Фиксация фактического вектора через датчики рыскания и ускорений
- Оценка расхождения:
- Сравнение пороговых значений рыскания (βфакт – βзад > Δкрит)
- Анализ градиента изменения бокового ускорения
- Выбор стратегии стабилизации:
Тип нарушения Действия ESP Избыточная поворачиваемость (занос) Притормаживание внешнего переднего колеса Недостаточная поворачиваемость (снос) Притормаживание внутреннего заднего колеса + снижение крутящего момента Динамическая нестабильность при торможении Циклическое перераспределение тормозных сил по колёсам - Динамическая коррекция:
- Пропорционально-интегральное регулирование тормозного давления
- Координация с ABS/ASR через шину CAN
- Завершение вмешательства:
- Постепенное снижение давления при достижении |βфакт – βзад| < Δmin
- Восстановление управления двигателем
Расчет критической скорости при прохождении поворотов
Критическая скорость автомобиля при прохождении поворота – это максимальная скорость, при которой возможно движение по дуге без потери поперечной устойчивости (без бокового скольжения или опрокидывания). Превышение этой скорости приводит к сносу передней оси, заносу задней оси или опрокидыванию транспортного средства. Расчет критической скорости является ключевым элементом проектирования систем безопасности и оценки рисков при эксплуатации.
Основная формула для расчета критической скорости базируется на равенстве центробежной силы и силы сцепления шин с дорожным покрытием. Центробежная сила \( F_{ц} = \frac{m \cdot v^2}{R} \), где \( m \) – масса автомобиля, \( v \) – скорость, \( R \) – радиус поворота. Сила сцепления \( F_{сц} = m \cdot g \cdot \mu \), где \( g \) – ускорение свободного падения, \( \mu \) – коэффициент поперечного сцепления.
Факторы влияния и методика расчета
Приравнивая силы \( F_{ц} = F_{сц} \), получаем базовую формулу для критической скорости \( v_{кр} \):
\[ v_{кр} = \sqrt{ \mu \cdot g \cdot R } \]
где:
vкр – критическая скорость (м/с),
μ – коэффициент поперечного сцепления (0.1–0.8 в зависимости от покрытия),
g ≈ 9.81 м/с²,
R – радиус поворота (м).
Для учета риска опрокидывания вводится дополнительный параметр – ширина колеи \( B \) и высота центра масс \( h_{цм} \). Критическая скорость по опрокидыванию:
\[ v_{кр\_опр} = \sqrt{ \frac{g \cdot R \cdot B}{2 \cdot h_{цм}} } \]
Основные факторы, влияющие на критическую скорость:
- Состояние дорожного покрытия (значение μ)
- Радиус поворота (уменьшение радиуса снижает vкр)
- Конструкция подвески и шин
- Распределение нагрузки по осям
- Высота центра масс (особенно для внедорожников)
| Коэффициент μ | Дорожное покрытие | Критическая скорость* (км/ч) |
|---|---|---|
| 0.8 | Сухой асфальт | 89 |
| 0.5 | Мокрый асфальт | 70 |
| 0.3 | Укатанный снег | 54 |
| 0.1 | Гололед | 32 |
*Пример для R=50 м. Пересчет: v(км/ч) = v(м/с) × 3.6
Расчет критической скорости интегрируется в системы курсовой устойчивости (ESC) и используется при проектировании дорог (радиусы кривых, виражи). Для водителей знание предельных скоростей предотвращает потерю управления при экстренных маневрах.
Методика определения коэффициента сцепления шин
Коэффициент сцепления φ определяется как отношение максимальной силы сцепления шины с опорной поверхностью к нормальной нагрузке на колесо. Его величина зависит от типа дорожного покрытия, состояния протектора, скорости движения, температуры и давления в шинах. Лабораторные испытания проводятся на стендах с имитацией дорожных условий, где фиксируются продольные и боковые силы при контролируемых скольжениях.
Полевые методы включают прямые замеры с использованием мобильных измерительных комплексов. Приборы фиксируют силу торможения при блокировке колес или проскальзывании ведущих колес, синхронизируя данные с датчиками нагрузки и скорости. Стандартизированные испытания требуют соблюдения условий: сухое чистое покрытие, скорость 40-60 км/ч, равномерное распределение нагрузки по осям.
Ключевые подходы к измерению
Основные методики экспериментального определения:
- Метод юза: Полная блокировка колес при торможении с замером замедления (φ = a/g, где a – замедление, g – ускорение свободного падения)
- Силовой метод: Использование динамометрических тележек или прицепов с измерительным колесом, регистрирующим силу сцепления при принудительном скольжении
- Косвенные расчеты: Анализ тормозного пути по формуле φ = V²/(254·S), где V – начальная скорость (км/ч), S – длина тормозного пути (м)
Для сопоставления методов применяют нормативные коэффициенты:
| Тип покрытия | Сухое (φ) | Мокрое (φ) |
|---|---|---|
| Асфальтобетон | 0.70-0.80 | 0.45-0.60 |
| Цементобетон | 0.75-0.85 | 0.50-0.65 |
| Гравий | 0.40-0.50 | 0.30-0.40 |
| Лед | 0.10-0.20 | 0.05-0.10 |
Точность измерений обеспечивается калибровкой оборудования и многократными испытаниями. Данные используются при проектировании тормозных систем, расчете безопасной скорости и разработке систем ABS/ESP. Для зимних шин дополнительно оценивают сцепление на обледенелых поверхностях при температурах ниже -5°C.
Оценка устойчивости против опрокидывания: статический и динамический расчет
Опрокидывание представляет критическую потерю устойчивости при поперечном или продольном смещении центра масс. Статическая оценка рассматривает равновесное состояние на уклоне или в повороте без учета инерционных сил. Динамический анализ охватывает реальные условия движения с переменными ускорениями, угловыми скоростями и реакциями покрытия.
Ключевым параметром для обоих методов является положение центра тяжести (ЦТ). Высота hg и смещение e ЦТ относительно колесной базы/колеи напрямую влияют на опрокидывающий момент. Дополнительными факторами служат жесткость подвески, деформация шин и распределение нагрузок по осям.
Статический расчет устойчивости
Основной критерий – статический стабилизирующий момент, противодействующий опрокидыванию. Для поперечной устойчивости на повороте:
- Критический угол крена: θкр = arctg(B / (2hg)), где B – колея
- Условие устойчивости: hg ≤ B / (2tgβ) (β – угол поперечного уклона)
Для продольной устойчивости при торможении на подъеме:
- Опрокидывание вперед: amax = g · L2 / hg
- Отрыв задних колес: Z2 = 0.5mg(L1 - a·hg/g) / L ≤ 0
Динамическая устойчивость
Учитывает инерционные силы при маневрах. Главные риски:
- Резкий поворот: центробежная сила Fц = mv2/R создает момент опрокидывания
- Торможение в повороте: векторное сложение продольных/поперечных ускорений
Критерии динамической оценки:
| Параметр | Формула | Описание |
|---|---|---|
| Критическая скорость | vкр = √(g·R·B/(2hg)) | Макс. скорость в повороте радиуса R |
| Запас устойчивости | Kу = (Fц·hg) / (0.5mg·B) | Отношение стабилизирующего/опрокидывающего моментов |
Динамические модели интегрируют уравнения движения с учетом:
- Кренового угла и кинематики подвески
- Перераспределения нормальных реакций
- Снижения сцепления при разгрузке колес
Влияние загрузки автомобиля на изменение центра тяжести

Центр тяжести (ЦТ) автомобиля – точка приложения равнодействующей сил тяжести всех его элементов. Положение ЦТ определяется тремя координатами: продольной (по оси X, от передней оси), поперечной (по оси Y, относительно плоскости симметрии) и высотной (по оси Z, от уровня дороги). Загрузка автомобиля пассажирами и грузом напрямую влияет на координаты ЦТ, смещая его положение в пространстве.
Наибольшее практическое значение имеет изменение высоты ЦТ и его продольного положения. Вертикальное смещение ЦТ увеличивает риск опрокидывания в поворотах или при экстренных маневрах, а продольное смещение (особенно вперед) ухудшает управляемость и перераспределяет нагрузку между осями, влияя на эффективность торможения и сцепление колес с дорогой. Поперечное смещение (влево/вправо) возникает при неравномерной боковой загрузке и также снижает устойчивость.
Последствия смещения центра тяжести
Ключевые эффекты изменения положения ЦТ при загрузке:
- Увеличение высоты ЦТ:
- Повышает склонность к опрокидыванию в поворотах из-за роста бокового крена.
- Увеличивает перераспределение веса на внешние колеса при криволинейном движении.
- Снижает эффективность стабилизирующих систем (например, ESP).
- Продольное смещение ЦТ (вперед или назад):
- Смещение вперед: Повышает нагрузку на переднюю ось, увеличивая риск блокировки передних колес при торможении и ухудшая поворачиваемость ("недостаточная поворачиваемость").
- Смещение назад: Увеличивает нагрузку на заднюю ось, повышая риск заноса ("избыточная поворачиваемость") и блокировки задних колес.
- Поперечное смещение ЦТ:
- Нарушает симметрию распределения веса по колесам одной оси.
- Создает постоянный статический крен и момент, стремящийся развернуть автомобиль.
- Ухудшает курсовую устойчивость на прямых и в поворотах.
Расчетные параметры для оценки влияния:
| Параметр | Формула/Принцип | Влияние загрузки |
|---|---|---|
| Высота ЦТ (hцт) | Определяется экспериментально или расчетно по массе элементов | ↑ при размещении груза на крыше/багажнике |
| Продольное положение ЦТ (a, b) | a = G2 * L / G ; b = G1 * L / G (G1, G2 – нагрузки на оси, G – полный вес, L – база) |
a ↑ при загрузке передка, b ↑ при загрузке задка |
| Критическая скорость опрокидывания | Vкр = √(g * R * B / (2 * hцт)) (R – радиус поворота, B – колея) |
↓ при ↑ hцт |
| Коэффициент статической устойчивости | Куст = B / (2 * hцт) | ↓ при ↑ hцт |
Важно: Производители указывают допустимую полную массу и распределение груза в руководстве по эксплуатации. Нарушение этих требований критично изменяет положение ЦТ, ухудшая фактическую устойчивость и управляемость относительно расчетных характеристик автомобиля. Особенно опасна высокая загрузка крыши или задней части легковых автомобилей и внедорожников.
Анализ креновой устойчивости при маневрах
Креновая устойчивость определяет способность автомобиля сохранять поперечное положение кузова при выполнении поворотов, перестроений и объездов препятствий. Чрезмерный крен снижает эффективность подвески, ухудшает контакт шин с дорогой и может привести к потере управляемости. Критическим параметром является угол крена, величина которого зависит от центробежной силы, высоты центра масс и жесткости стабилизаторов поперечной устойчивости.
Расчет устойчивости включает оценку критической скорости при маневрировании, при которой возникает риск опрокидывания или потери сцепления. Для этого анализируется баланс моментов: центробежная сила, приложенная к центру масс, создает опрокидывающий момент, тогда как реакция опорной поверхности формирует стабилизирующий момент. Превышение первого над вторым указывает на потерю устойчивости.
Факторы влияния и методы оценки
Основные параметры, определяющие креновую устойчивость:
- Высота центра масс (ЦМ): Чем выше ЦМ, тем больше плечо опрокидывающего момента.
- Колея колес: Широкая колея увеличивает стабилизирующий момент.
- Жесткость подвески: Повышение жесткости пружин и стабилизаторов снижает угол крена.
- Распределение нагрузки: Неравномерность ухудшает устойчивость в критических режимах.
Для количественной оценки используют коэффициент статической устойчивости:
Kуст = 0.5 * B / hцм
где B – колея, hцм – высота центра масс. Автомобиль считается устойчивым при Kуст ≥ 1.2.
Динамический анализ включает моделирование "поворота с постоянным радиусом" или "переставки" (испытание "лосиный тест"). При этом фиксируются:
- Зависимость угла крена от скорости.
- Изменение вертикальной нагрузки на внешних и внутренних колесах.
- Критическая скорость потери контакта колеса с дорогой.
| Параметр | Безопасное значение | Критическое значение |
|---|---|---|
| Угол крена | ≤ 5° | ≥ 8° |
| Разгрузка внутренних колес | ≤ 30% | ≥ 50% |
| Скорость в "лосином тесте", км/ч | ≥ 70 | ≤ 60 |
Важно: При проектировании применяют системы электронной стабилизации (ESP), компенсирующие крен за счет активного подтормаживания колес и управления крутящим моментом двигателя. Однако их эффективность ограничена физическими возможностями шин и параметрами шасси.
Система распределения тормозных усилий (EBD): расчетные параметры
Расчет оптимального распределения тормозных усилий в EBD базируется на динамических характеристиках автомобиля, включая вертикальную нагрузку на оси, положение центра масс и продольное ускорение. Система непрерывно анализирует данные от датчиков частоты вращения колес, датчика угла поворота рулевого колеса и акселерометров, вычисляя фактическое сцепление каждого колеса с дорожным покрытием. При этом учитывается изменение развесовки при торможении: увеличение нагрузки на переднюю ось и разгрузка задней, что требует пропорционального снижения тормозного момента на задних колесах.
Ключевым параметром является коэффициент сцепления (μ), определяемый для каждого колеса на основе разницы между угловой скоростью вращения и скоростью движения автомобиля. Система вычисляет теоретически необходимое усилие для блокировки колеса с учетом текущей вертикальной нагрузки (Fz) по формуле: Fx max = μ · Fz, где Fx max – максимальная сила торможения до блокировки. На основе этих расчетов EBD динамически корректирует давление в тормозных контурах, предотвращая преждевременную блокировку колес с уменьшенной нагрузкой.
Основные расчетные параметры и алгоритмы EBD
Система оперирует следующими критическими величинами для определения распределения усилий:
- Дельта скорости вращения колес (Δω): разница угловых скоростей между осями и колесами одной оси, указывающая на начало проскальзывания
- Нормированное проскальзывание (λ): рассчитывается как λ = (v - ω·r) / v, где v – скорость авто, ω – угловая скорость колеса, r – радиус качения
- Коэффициент распределения (Kr): отношение тормозных сил передней/задней оси, определяемое как Kr = Ff / Fr, где Ff и Fr – суммарные тормозные силы по осям
Оптимальное значение Kr вычисляется по формуле:
Kr opt = (Lr + hg · ax/g) / (Lf - hg · ax/g)
где Lf, Lr – расстояния от центра масс до осей, hg – высота центра масс, ax – текущее замедление, g – ускорение свободного падения.
| Параметр | Влияние на расчет EBD | Типовые значения |
|---|---|---|
| Высота центра масс (hg) | Определяет величину перераспределения нагрузки при торможении | 0.4–0.6 м (легковые авто) |
| Продольное ускорение (ax) | Рассчитывается по данным акселерометра; влияет на критический Kr | До 10 м/с² (экстренное торможение) |
| Коэффициент сцепления (μ) | Корректирует Fx max для разных покрытий (асфальт, лед) | 0.1–0.15 (лед), 0.7–0.9 (сухой асфальт) |
Алгоритм EBD включает прогнозирующую модель, которая на основе производных dλ/dt и d(ax)/dt предугадывает развитие блокировки. При отклонении Kr от оптимального более чем на 15-20% система инициирует коррекцию давления через модуляторы тормозных сил. Точность расчетов обеспечивается частотой обработки данных 50-100 Гц, что позволяет адаптироваться к резким изменениям дорожных условий.
Учет деформации подвески в уравнениях движения
Деформации упругих элементов подвески напрямую влияют на кинематику кузова и колес, изменяя углы крена, тангажа, положение центра масс относительно опорной поверхности. Эти изменения критичны для корректного описания распределения нормальных реакций дороги, которые определяют предельные силы сцепления шин. Без учета податливости подвески уравнения движения дают завышенные оценки устойчивости, особенно при маневрировании на высоких скоростях или экстренном торможении.
При построении математической модели вводятся дополнительные степени свободы, связанные с относительным перемещением кузова и мостов. Упругие характеристики подвески (жесткость пружин cij и демпфирование амортизаторов dij) описываются нелинейными зависимостями, учитывающими прогрессию и гистерезис. Для каждой оси i и стороны j (левая/правая) определяются деформации Δzij, влияющие на вектор кинематических параметров.
Ключевые аспекты математической модели
Силы в подвеске формируются как сумма упругих и диссипативных составляющих:
- Вертикальные силы: Fzij = cij(Δzij) + dij(Δżij)
- Моменты крена: Mx = ∑(Fzij · yij)
- Моменты тангажа: My = ∑(Fzij · xij)
Уравнения движения кузова дополняются слагаемыми, учитывающими смещение ЦМ и инерционные характеристики:
- m·ax = Fxfl + Fxfr + Fxrl + Fxrr + m·h·dωy/dt
- m·ay = Fyfl + Fyfr + Fyrl + Fyrr - m·h·dωx/dt
- Ix·dωx/dt = Mx + m·ay·h
Влияние деформации на углы установки колес:
| Параметр | Зависимость от деформации |
|---|---|
| Развал γ | γ = γ0 + kγ·Δz |
| Схождение δ | δ = δ0 + kδ·Δz |
Коэффициенты kγ и kδ определяются кинематикой конкретной подвески. При интегрировании уравнений требуется совместный расчет деформаций подвески и сил в шинах, так как нормальная нагрузка Fz влияет на коэффициенты сцепления. Итерационные методы применяются для решения нелинейной системы, особенно при моделировании предельных режимов.
Расчет тормозного пути с поправкой на сцепные свойства покрытия

Тормозной путь автомобиля напрямую зависит от коэффициента сцепления шин с дорожным покрытием (φ), который варьируется в зависимости от погодных условий и состояния поверхности. Данный коэффициент отражает максимальное замедление, которое может обеспечить автомобиль без потери управляемости. Стандартная формула для расчета тормозного пути (S) без учета времени реакции водителя имеет вид: S = V² / (2gφ), где V – начальная скорость движения (м/с), g – ускорение свободного падения (≈9.8 м/с²).
Поправка на сцепные свойства вводится через экспериментально определенные значения φ для различных покрытий. Например, для сухого асфальта φ ≈ 0.7-0.8, для мокрого – 0.4-0.5, для укатанного снега – 0.2-0.3, а для гололеда – всего 0.05-0.1. Применение этих коэффициентов в формуле позволяет рассчитать реалистичный тормозной путь для конкретных дорожных условий, что критично для оценки безопасности.
Практическая реализация расчета
Для определения тормозного пути с поправкой на покрытие выполняют следующие шаги:
- Замеряют начальную скорость автомобиля (V) в м/с. Перевод из км/ч: Vм/с = Vкм/ч × 1000 / 3600.
- Определяют коэффициент φ для актуального покрытия (используя справочные таблицы или датчики системы ESP).
- Рассчитывают замедление: a = φ × g.
- Вычисляют тормозной путь: S = V² / (2a).
Пример для скорости 60 км/ч (16.7 м/с):
| Покрытие | φ | Тормозной путь (м) |
|---|---|---|
| Сухой асфальт | 0.7 | 16.7² / (2×9.8×0.7) ≈ 20.3 |
| Мокрый асфальт | 0.4 | 16.7² / (2×9.8×0.4) ≈ 35.5 |
| Гололед | 0.1 | 16.7² / (2×9.8×0.1) ≈ 142.2 |
Важно! Данная формула предполагает идеальное срабатывание тормозов. В реальности необходимо добавлять путь за время реакции водителя (0.4-1.5 сек) и учитывать эффективность тормозной системы (коэффициент k≈1.1-1.3 для легковых авто). Полная формула: Sполн = (tр × V) + (k × V²) / (2gφ).
Управляемость при экстренном торможении: векторные модели
Векторные модели анализируют взаимодействие сил на колёса при экстренном торможении, представляя сцепление шин с дорогой в виде векторов. Каждая шина характеризуется вектором силы трения, направление и величина которого зависят от продольного (тормозного) и бокового (управляющего) усилий. Критический параметр – эллипс сцепления Камма, ограничивающий результирующую силу комбинацией этих компонентов.
При блокировке колеса (превышении продольного усилия) его вектор боковой силы стремится к нулю, что исключает возможность маневрирования. Модели демонстрируют, как неравномерное распределение тормозных моментов между осями или колёсами вызывает вращающий момент вокруг вертикальной оси, провоцируя занос. Динамика векторов скорости и ускорения определяет траекторию движения при совмещении торможения с поворотом руля.
Факторы управляемости в векторном представлении
| Параметр | Влияние на управляемость |
|---|---|
| Баланс тормозных сил | Перекос вызывает рыскание (yaw moment) |
| Угол поворота передних колёс | Определяет направление вектора боковой силы |
| Коэффициент сцепления (μ) | Задаёт радиус эллипса Камма для каждого колеса |
| Продольное ускорение | Снижает нагрузку на заднюю ось → риск блокировки |
Принципы сохранения управляемости:
- Удержание векторов силы в пределах эллипса сцепления для всех колёс
- Синхронизация ABS с углом поворота руля для дозирования тормозного момента
- Контроль вектора скорости: плавное снижение модуля скорости сохраняет запас сцепления для манёвра
Компьютерное моделирование потери устойчивости
Моделирование потери устойчивости реализуется через системы дифференциальных уравнений, описывающих динамику транспортного средства в трёхмерном пространстве. Эти уравнения учитывают инерционные характеристики кузова и подвески, кинематику рулевого управления, свойства шин (эластичность, трение, гистерезис), а также внешние воздействия – боковой ветер, неровности дорожного полотна, гравитационные силы на уклонах. Ключевыми параметрами являются углы рыскания, крена и скольжения, продольные/поперечные ускорения, скорости вращения колёс.
Специализированное ПО (Adams/Car, CarSim, MATLAB/Simulink) позволяет варьировать исходные условия: массу и центр тяжести автомобиля, жёсткость амортизаторов, характеристики стабилизаторов, тип привода, состояние покрытия (асфальт, лёд, грунт), начальную скорость, угол поворота руля. Моделирование выявляет критические режимы – снос передней оси, занос задней оси, опрокидывание – фиксируя пороговые значения управляющих воздействий (резкий поворот, экстренное торможение) или внешних факторов, при которых система выходит из устойчивого равновесия.
Алгоритм анализа критических сценариев
- Формирование виртуального полигона с заданными параметрами:
- Коэффициент сцепления шин с дорогой (μ от 0.1 до 0.9)
- Профиль трассы (повороты, уклон, деформации)
- Атмосферные условия (ветер, осадки)
- Запуск динамического расчёта с пошаговым изменением управляющих сигналов:
- Резкое торможение с блокировкой колёс
- Поворот руля на фиксированный угол при постоянной скорости
- Комбинированные манёвры (торможение в повороте)
- Оценка реакции системы по ключевым индикаторам:
Индикатор Критическое значение Угол рыскания (β) > 10° Угол крена (φ) > 7° Боковое ускорение (ay) > 0.6g Скольжение шин (λ) > 15% - Визуализация траекторий и векторов сил:
- Отклонение от заданной траектории
- Диаграммы "момент-кривизна" для рамы кузова
- Распределение контактных пятен шин
Результаты моделирования интегрируются в системы электронной стабилизации (ESP), где виртуальные тесты определяют алгоритмы корректирующих воздействий – подтормаживания отдельных колёс, изменения крутящего момента двигателя. Для проектирования безопасности моделирование позволяет оптимизировать геометрию подвески, настройки АБС, размещение тяжёлых агрегатов, снижая риски потери управляемости в реальных условиях эксплуатации.
Испытательные методы оценки характеристик устойчивости

Основная цель испытательных методов заключается в получении объективных количественных данных о способности автомобиля сохранять заданную траекторию при различных воздействиях и условиях движения. Эти методы моделируют критические ситуации для оценки реакций транспортного средства на управляющие и возмущающие воздействия.
Испытания проводятся на специальных полигонах с измерительным оборудованием, фиксирующим ключевые параметры: углы поворота рулевого колеса, боковые ускорения, крен кузова, скорости вращения колес, траекторию движения. Точность измерений обеспечивается высокочастотной регистрацией данных с использованием датчиков инерциальных систем, GPS и оптических систем слежения.
Классификация методов испытаний

Методы оценки разделяются на несколько категорий в зависимости от типа маневра и условий проведения:
- Стационарные методы: Оценка реакции на постоянное боковое ускорение (испытания на поворачиваемость)
- Переходные методы: Анализ поведения при резком изменении условий движения
- Комбинированные воздействия: Исследование устойчивости при одновременном торможении/разгоне и повороте
Ключевые стандартизированные испытательные маневры включают:
- Испытание "Переставка" (ISO 3888-2): Резкий объезд препятствия с возвратом на исходную полосу для оценки аварийной управляемости
- Поворот с постоянным радиусом (ISO 4138): Постепенное увеличение скорости в вираже до потери сцепления
- Торможение в повороте (ISO 7975): Анализ сохранения траектории при экстренном торможении на дуге
- Резкий вход в поворот (ISO 7401): Оценка переходных процессов при быстром повороте руля
Критерии оценки устойчивости по результатам испытаний:
| Параметр | Единицы измерения | Значение для оценки |
| Максимальное боковое ускорение | м/с² | ≥ 8 для легковых авто |
| Угол крена кузова | градусы | ≤ 5-7 при номинальной нагрузке |
| Время переходного процесса | секунды | ≤ 0.3-0.5 после маневра |
| Отклонение траектории | метры | ≤ 0.5 от заданной при ISO-маневрах |
Современные испытания дополняются компьютерным моделированием для прогнозирования поведения в нестандартных условиях. Важным аспектом является воспроизведение предельных режимов работы систем активной безопасности (ESP, ABS), где фиксируется эффективность их вмешательства для предотвращения заноса или опрокидывания.
Оптимизация геометрии подвески для повышения стабильности
Ключевые геометрические параметры подвески напрямую влияют на пятно контакта шины с дорогой при динамических нагрузках. Оптимизация углов установки колес и кинематики рычагов минимизирует нежелательные изменения положения колес при кренах, ускорениях и торможении. Корректная геометрия обеспечивает предсказуемую реакцию на рулевое управление и стабилизирует траекторию движения.
Расчеты проводятся с учетом критических режимов: экстренного торможения на разнородных покрытиях, прохождения поворотов с максимальной боковой нагрузкой, движения по неровностям. Моделирование в специализированном ПО (например, Adams/Car) позволяет проанализировать изменение параметров во всем диапазоне хода подвески и выбрать оптимальные компромиссы между устойчивостью, управляемостью и комфортом.
Основные параметры оптимизации
| Параметр | Цель оптимизации | Эффект для устойчивости |
|---|---|---|
| Поперечный наклон шкворня (KPI) | Уменьшение плеча обкатки | Снижение воздействия неровностей на руль, стабилизация при торможении |
| Продольный угол кастера | Поддержание положительного значения 5-9° | Автоматическое возвращение колес в нейтральное положение, улучшение курсовой устойчивости |
| Кинематика развала | Обеспечение отрицательного развала в повороте | Максимизация площади контакта шины при боковых нагрузках, предотвращение сноса |
| Схождение | Динамическая коррекция по ходу подвески | Компенсация увода шин, стабильность на прямолинейных участках |
Критические аспекты проектирования:
- Минимизация изменения колеи при работе подвески для сохранения курсовой устойчивости
- Контроль продольного перемещения колеса при торможении для предотвращения "клевков"
- Оптимизация плеча обкатки для снижения чувствительности к дисбалансу шин
Применение многорычажных схем позволяет независимо настраивать параметры кинематики. Для проверки результатов используются стендовые испытания с имитацией нагрузок и полевые тесты с регистрацией:
- Угловых отклонений кузова
- Фактических траекторий колес
- Силовых реакций в точках крепления подвески
Корректировка геометрии выполняется итерационно с учетом характеристик шин и жесткостей элементов. Результирующая стабильность оценивается по критериям: минимальное отклонение от заданной траектории при экстренном торможении со 100 км/ч, отсутствие ритмического заноса на скользком покрытии, линейность отклика на рулевое воздействие.
Прогнозирование критических режимов движения
Прогнозирование критических режимов движения направлено на заблаговременное выявление ситуаций, при которых автомобиль рискует потерять устойчивость или управляемость. Это позволяет водителям или электронным системам безопасности принять превентивные меры до наступления необратимых последствий. Точное предсказание таких режимов снижает вероятность заносов, опрокидываний и срыва в неконтролируемое скольжение.
Основой прогнозирования служит математическое моделирование динамики автомобиля с использованием параметров движения: скорости, ускорений, углов поворота руля, коэффициентов сцепления шин с покрытием. Анализ этих данных в реальном времени помогает вычислить критические пороговые значения, при превышении которых система генерирует предупреждения или автоматически корректирует режим работы агрегатов.
Ключевые аспекты прогнозирования
Методы оценки риска:
- Расчёт коэффициента запаса устойчивости на основе сравнения действующих боковых сил с предельным сцеплением шин.
- Анализ скорости нарастания угла скольжения осей для выявления тенденции к заносу.
- Прогноз траектории движения при экстренном торможении или манёвре с учётом инерционных характеристик.
Параметры для мониторинга:
| Параметр | Датчики | Критический признак |
|---|---|---|
| Поперечное ускорение | Акселерометры | Превышение 0,8-1,0 g на сухом покрытии |
| Угловая скорость рыскания | Гироскопы | Резкий рост (>15°/с) при манёвре |
| Скольжение шин | ABS, датчики вращения | Разница скоростей вращения >15% |
| Угол поворота руля | Энкодер рулевой колонки | Резкие отклонения при высокой скорости |
Алгоритмы превентивного контроля:
- Оценка предельного угла поворота для текущей скорости без потери сцепления.
- Расчёт максимально допустимого замедления перед торможением с учётом загрузки осей.
- Сравнение фактической траектории с заданной водителем для выявления расхождений.
Интеграция прогнозных моделей в системы ESP и ADAS позволяет автоматически подтормаживать отдельные колёса, снижать крутящий момент двигателя или корректировать усилие руля при обнаружении риска. Точность прогнозирования напрямую влияет на эффективность предотвращения ДТП, особенно на скользких покрытиях и в сложных манёврах.
Ручное вычисление порога срабатывания ESP
Порог срабатывания ESP определяется как критическое значение разницы между угловой скоростью вращения автомобиля вокруг вертикальной оси и скоростью изменения курсового угла. Основная задача – расчет предельной величины бокового ускорения, при котором электроника активирует стабилизацию. Для этого используются физические параметры автомобиля и динамические характеристики движения.
Ключевыми исходными данными служат: коэффициент сцепления шин с покрытием (μ), масса автомобиля (m), расстояние от центра масс до передней/задней оси (a и b), высота центра масс (h), колесная база (L), скорость движения (V) и передаточное число рулевого управления (i). Необходимо также учитывать максимальный угол поворота управляемых колес (δ_max) и конструктивные особенности подвески.
Этапы расчета
1. Определение критического бокового ускорения:
Вычисляется по формуле: \( a_{y_{crit}} = \mu \cdot g \), где \( g \) – ускорение свободного падения (9.81 м/с²). Данное значение представляет физический предел сцепления шин.
2. Расчет порога рыскания:
Предельная угловая скорость вращения (ω_max) определяется как:
\( \omega_{max} = \frac{a_{y_{crit}}}{V} \)
где \( V \) – текущая скорость автомобиля. При достижении этой величины система идентифицирует начало заноса.
3. Учет динамики рулевого управления:
Порог корректируется с учетом фактического угла поворота руля (θ) и передаточного числа (i):
\( \delta = \frac{\theta}{i} \)
Ожидаемая угловая скорость рассчитывается как:
\( \omega_{exp} = \frac{V \cdot \delta}{L \cdot (1 + K \cdot V^2)} \)
где \( K \) – коэффициент недостаточной поворачиваемости.
4. Определение порога активации ESP:
Система срабатывает при выполнении условия:
\( |\omega_ > \omega_{threshold \)
где \( \omega_{meas} \) – измеренная датчиком угловая скорость, а \( \omega_{threshold} \) – калибровочное значение, обычно составляющее 15-25% от ω_max.
Критерии калибровки порога:
- Учет погрешностей датчиков инерциальной системы (IMU)
- Адаптация к типу покрытия (асфальт, лед, гравий)
- Корректировка по степени износа шин
- Температурная компенсация параметров сцепления
| Параметр | Обозначение | Единицы измерения |
|---|---|---|
| Коэффициент сцепления | μ | безразмерный |
| Боковое ускорение | ay | м/с2 |
| Угловая скорость вращения | ω | рад/с |
| Скорость автомобиля | V | м/с |
Важно! Для груженого автомобиля пересчитываются: положение центра масс (h), распределение массы по осям (a, b) и фактический коэффициент сцепления (μреал).
Алгоритмы стабилизации при потере сцепления задней оси
Потеря сцепления задней оси проявляется в избыточной поворачиваемости: задняя часть автомобиля смещается наружу поворота, создавая риск вращения. Алгоритмы электронного контроля устойчивости (ESC) идентифицируют это состояние по расхождению между фактической и расчетной угловой скоростью вращения вокруг вертикальной оси (рыскания), а также по боковому ускорению.
Цель стабилизации – восстановление траектории без блокировки колес путем селективного торможения и управления крутящим моментом двигателя. Система непрерывно сопоставляет показания датчиков (угла поворота руля, скорости вращения колес, акселерометров, гироскопа) с эталонной моделью поведения автомобиля для расчета корректирующих воздействий.
Принципы работы алгоритмов стабилизации
Ключевые этапы обработки данных и реагирования:
- Обнаружение сноса задней оси: Система анализирует:
- Знак и скорость изменения угловой скорости рыскания (ψ̇)
- Соотношение бокового ускорения (ay) и угла поворота руля
- Разницу между требуемым (на основе рулевого ввода) и фактическим радиусом поворота.
- Расчет корректирующего момента: На основе отклонений вычисляется необходимый стабилизирующий момент (Mz), противодействующий вращению:
- Mz = K1 · Δψ̇ + K2 · ∫Δψ̇ dt + K3 · d(Δψ̇)/dt (ПИД-регулятор)
- Где K1, K2, K3 – калибровочные коэффициенты, Δψ̇ – отклонение угловой скорости.
- Выбор колеса для торможения: Для создания момента, стабилизирующего заднюю ось:
- При сносе задней оси в левом повороте тормозится переднее левое колесо.
- При сносе задней оси в правом повороте тормозится переднее правое колесо.
- Дозирование тормозного усилия: Гидравлический модулятор создает давление в контуре выбранного колеса. Сила торможения пропорциональна величине рассчитанного момента Mz и динамически регулируется для плавной стабилизации.
- Коррекция крутящего момента двигателя: ЭБУ двигателя снижает подачу топлива или осуществляет переключение передач для уменьшения мощности, передаваемой на колеса, дополняя тормозное воздействие.
Эффективность алгоритмов зависит от точности сенсоров, скорости обработки данных (цикл 5-20 мс) и калибровки под характеристики шасси. Критические параметры:
| Параметр | Оптимальный диапазон | Влияние на стабилизацию |
|---|---|---|
| Время реакции ESC | < 100 мс | Сокращение амплитуды заноса |
| Точность датчика рыскания | ±0.5°/с | Раннее обнаружение сноса |
| Градиент нарастания тормозного усилия | 15-30 МПа/с | Баланс между резкостью и плавностью коррекции |
Современные системы адаптируются к покрытию (асфальт, лед) и нагрузке автомобиля, используя данные АБС и датчиков подвески. Аппаратная избыточность (дублирование сенсоров) повышает отказоустойчивость при критических маневрах.
Автоматизация расчетов устойчивости в диагностических системах
Современные диагностические системы интегрируют алгоритмы расчета критических параметров устойчивости в реальном времени. Они непрерывно обрабатывают данные от датчиков угла поворота руля, продольного/поперечного ускорения, скорости вращения колес и угловой скорости кузова. На основе математических моделей динамики (например, уравнений Райса или модели "байкера") вычисляются запасы устойчивости по критериям опрокидывания и заноса.
Программные модули сопоставляют текущие показатели с пороговыми значениями для конкретной модели автомобиля, учитывая состояние дорожного покрытия и загрузку. При приближении к критическим зонам система генерирует превентивные сигналы для водителя или корректирующие команды для систем активной безопасности (ESC, ABS). Точность расчетов обеспечивается калибровкой датчиков и адаптивными алгоритмами, компенсирующими износ шин и изменения массы.
Ключевые аспекты реализации
Аппаратно-программные компоненты:
- Датчиковая сеть: акселерометры, гироскопы, датчики давления в тормозной системе и угла поворота руля
- Вычислительные блоки: микроконтроллеры с математическими сопроцессорами для решения дифференциальных уравнений
- Адаптивные модели: алгоритмы машинного обучения для учета деградации компонентов и изменения коэффициента сцепления
Пример расчета запаса устойчивости:
| Параметр | Формула | Пороговое значение |
| Запас против опрокидывания | Kопр = 0.5·B / (hц.т.·ay/g) | ≥1.25 |
| Запас против заноса | Kск = φ·g / ay | ≥1.15 |
Диагностические комплексы проводят верификацию расчетов через OBD-интерфейс, используя тестовые сценарии движения. Результаты мониторинга записываются в энергонезависимую память для последующего анализа причин потери устойчивости, что критично для расследования ДТП и совершенствования систем безопасности.
Интеграция систем активной безопасности для комплексной защиты

Современные автомобили оснащаются множеством разрозненных систем активной безопасности (ABS, ESP, TCS и др.), но их изолированная работа не обеспечивает максимальной эффективности. Интеграция этих систем в единый управляющий комплекс позволяет синхронизировать их действия, прогнозировать критические ситуации и адаптировать реакцию автомобиля к изменяющимся дорожным условиям в реальном времени.
Ключевым элементом интеграции выступает центральный электронный блок управления (ECU), который обрабатывает данные от датчиков (ускорения, угла поворота руля, скорости вращения колес, поперечного увода) и координирует работу всех компонентов. Например, при экстренном торможении на скользком повороте ECU одновременно активирует ABS для предотвращения блокировки колес, подключает ESP для коррекции траектории и регулирует распределение крутящего момента через TCS, компенсируя недостаточную поворачиваемость.
Принципы интеграции и функциональные преимущества
Синергетический эффект достигается за счет:
- Объединения сенсорных данных в единую цифровую модель поведения автомобиля
- Алгоритмов предиктивного анализа, вычисляющих риски до возникновения неконтролируемой ситуации
- Динамического перераспределения функций между системами (например, ESP частично берет на себя задачи TCS при пробуксовке)
| Система | Роль в интеграции | Ключевые датчики |
|---|---|---|
| ABS | Контроль тормозного усилия на грани блокировки | Датчики скорости колес |
| ESP | Стабилизация курсовой устойчивости | Гироскоп, акселерометр |
| TCS | Управление тяговым усилием | Датчики углового ускорения |
Расчет устойчивости в интегрированных системах базируется на непрерывном мониторинге векторов сил: ECU вычисляет разницу между теоретической траекторией (на основе угла поворота руля) и фактическим движением. Если отклонение превышает критический порог (например, 2-3° по рысканию), система компенсирует его импульсным подтормаживанием колес и коррекцией крутящего момента двигателя.
- Определение порогов устойчивости для конкретных условий (скорость, коэффициент сцепления)
- Прогнозирование сценариев потери управления с помощью машинного обучения
- Автоматическая калибровка систем под износ шин и загрузку авто
Безопасность дорожного движения повышается благодаря сокращению тормозного пути на 15-20% при комплексном срабатывании систем, уменьшению риска заноса на смешанных покрытиях на 40%, а также предотвращению типичных аварийных ситуаций: сноса передней оси, вращения при резком маневре, опрокидывания в повороте.
Список источников
При подготовке материалов по устойчивости и управляемости автомобиля использовались фундаментальные научные работы, современные нормативные документы и актуальные исследования в области динамики транспортных средств. Основное внимание уделялось источникам, содержащим методики расчета и экспериментальные данные.
Следующие издания предоставляют теоретические основы и практические рекомендации для оценки безопасности движения:
- Гришкевич А.И. Динамика автомобиля: Учебник для вузов. – М.: Машиностроение.
- Литвинов А.С., Фаробин Я.Е. Автомобиль: Теория эксплуатационных свойств. – М.: Машиностроение.
- ГОСТ Р 52389-2005 "Автотранспортные средства. Устойчивость и управляемость. Технические требования"
- Milliken W.F., Milliken D.L. Race Car Vehicle Dynamics. – SAE International.
- Раймпель Й. Шасси автомобиля: Рулевое управление, подвеска, тормоза. – М.: Машиностроение.
- Журнал "Автомобильная промышленность": Статьи по испытаниям активной безопасности ТС (2020-2023 гг.)
- ЕЭК ООН № 13-H: Единообразные предписания для тормозных систем легковых автомобилей
- Харитохин В.И. Моделирование динамики колесных машин. – М.: Изд-во МГТУ им. Баумана.