Сложности обратной параллельной парковки
Статья обновлена: 28.02.2026
Параллельная парковка задним ходом остаётся одним из самых стрессовых манёвров для водителей любого уровня. Этот навык, требующий точной координации руления и контроля габаритов автомобиля, создаёт значительные трудности даже в условиях ограниченного трафика.
Главная проблема кроется в необходимости одновременного учёта множества факторов: положения соседних машин, угла поворота колёс, траектории движения задней и передней оси в стеснённом пространстве, где любая ошибка грозит столкновением или созданием помех.
Правильный выбор стартовой позиции перед маневром

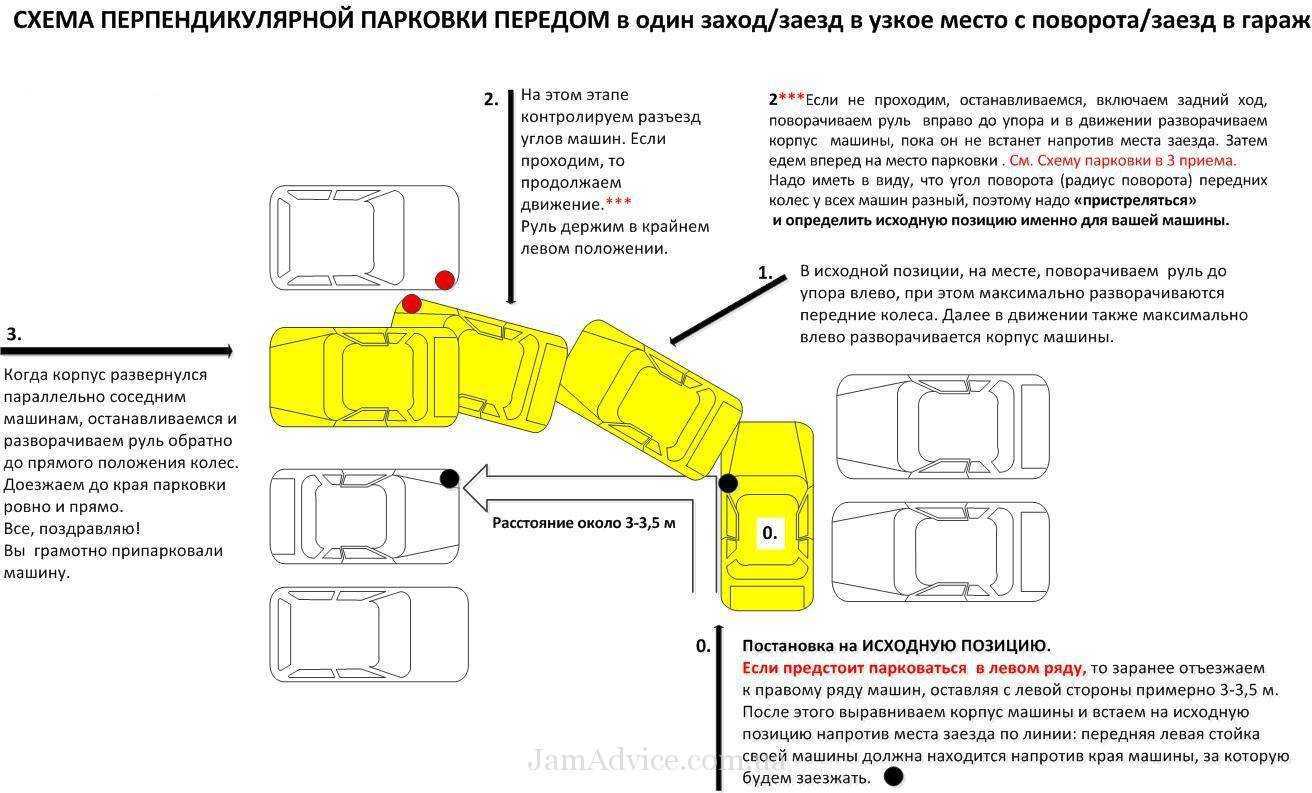
Точное позиционирование автомобиля перед началом парковки – базовое условие для успешного маневра. Машина должна находиться строго параллельно борту целевого ТС с запасом 50-100 см между бортами, продолжая движение параллельно ряду припаркованных авто до момента, когда задние бамперы сравняются. Пренебрежение этим шагом приводит к критичному смещению траектории или заезду на бордюр.
Корректная дистанция до соседней машины определяется боковыми зеркалами: при выравнивании зеркал по высоте с зеркалами рядом стоящего автомобиля расстояние обычно оптимально. Важно контролировать положение задних колес относительно парковочного кармана – они должны поравняться с задним бампером передней машины (при парковке справа) или ее средними стойками (при левосторонней парковке).
- Линейные ориентиры:
- Правый маневр: водительское окно – на уровне заднего бампера переднего авто.
- Левый маневр: зеркало бокового вида – напротив передней стойки машины справа.
- Ошибки позиционирования:
- Слишком большое расстояние от ряда (>1 м) – авто "срезает" угол и встает криво.
- Слишком близкое расстояние (<50 см) – высокий риск задеть соседний ТС при выкручивании руля.
- Смещенные перед/зад ТС относительно зоны парковки – нехватка места для захода или выравнивания.
| Параметр | Идеальное значение | Риск при нарушении |
|---|---|---|
| Боковой интервал | 0.5-1 метр | Затирание колес или ДТП |
| Совмещение задних бамперов | Точное | Угол въезда < 45°, нехватка места |
| Угол колес при старте | Прямо | Раннее/позднее смещение оси |
Контроль угла поворота руля на начальном этапе
Ключевым фактором является правильное определение момента полного выворота руля сразу после начала движения назад. Новички часто ошибаются в выборе исходной точки: преждевременный поворот создает опасность касания переднего автомобиля, запоздалый – приводит к недостаточному отклонению задней оси. Неправильный расчет угла в первые секунды манёвра предопределяет сбитую траекторию на всех последующих стадиях.
Основные проблемы возникают из-за отсутствия физического ощущения габаритов транспортного средства. Водители часто не учитывают разницу в радиусах поворота передних и задних колес, что ведет к критичным последствиям:
- Недостаточный угол оставляет корпус параллельно проезжей части, не позволяя завершить въезд в карман
- Избыточный поворот вызывает резкое смещение переднего крыла к впереди стоящей машине
- Некорректный вход в поворот приводит к блокировке задних колес о бордюр
Синхронизация движений руля и педали газа
Ключевая сложность заключается в необходимости одновременного и плавного манипулирования рулевым колесом и педалью газа при движении задним ходом. Водитель должен точно координировать угол поворота руля с интенсивностью и длительностью нажатия на акселератор, чтобы обеспечить правильную траекторию смещения автомобиля в посадочный карман. Любое рассогласование этих действий немедленно приводит к некорректному положению машины.
Распространенные ошибки новичков напрямую связаны с этой проблемой: слишком резкий поворот руля при недостаточном газу не позволит авто заехать достаточно глубоко, тогда как избыточная тяга при запоздалом вращении баранки чревата ударом о бордюр или впереди стоящий автомобиль. Сложность усугубляется тем, что действия со сцеплением также влияют на плавность хода.
Для успешной синхронизации принципиально важно:
- Минимальная скорость: Двигаться строго на минимально контролируемой скорости, используя частичное сцепление или кратковременные подгазовки.
- Предвидение траектории: Продумывать направление и повороты руля заранее, а не в момент выполнения манёвра.
- Корректировка на ходу: Постоянно контролировать положение машины через зеркала и при необходимости оперативно корректировать *и* газ, *и* угол поворота.
Отсутствие навыка работы с зеркалами заднего вида

Многие водители, особенно новички, не умеют оперативно и правильно интерпретировать информацию из зеркал во время параллельной парковки задним ходом. Отсутствие этого навыка приводит к непониманию реального расположения автомобиля относительно бордюра и соседних транспортных средств. Водители ошибочно полагаются на интуицию или поворот головы, что не обеспечивает полного обзора слепых зон.
Неспособность синхронизировать движения руля с картинкой в зеркалах вызывает грубые ошибки: авто либо не вписывается в парковочный карман, либо становится под углом, задевает бордюр или другие машины. Отсутствие мышечной памяти для быстрой коррекции траектории по зеркальным отражениям многократно удлиняет процесс парковки, провоцируя стресс и хаотичные действия.
Типичные последствия:
- Неправильная оценка зазоров между бамперами при завершении манёвра, ведущая к касательным ударам
- Риск наезда на тротуар колёсами из-за несвоевременного распознавания положения задних шин
- Постоянная необходимость выходить из машины для визуальной проверки, что затрудняет парковку в потоке транспорта
Трудности с ориентированием по габаритам заднего бампера

Главной проблемой при ориентировании по габаритам заднего бампера выступает его фактическая невидимость для водителя с места управления автомобилем. Водитель физически не способен напрямую увидеть нижнюю кромку бампера и оценить, насколько близко она находится к препятствию сзади, будь то бордюр или задний бампер другого автомобиля. Этот прямой визуальный контакт критически важен для точной оценки расстояния при финальном маневрировании.
Использование заднего стекла и зеркал для оценки положения бампера дает лишь условное представление и чревато значительными ошибками. Через зеркала плоскость заднего бампера видна под сложным углом, что существенно искажает восприятие расстояния. Парктроники или камера заднего вида, несмотря на свою полезность, не всегда точно отображают самый край бампера или точно передают расстояние в сантиметрах, особенно при движении задним ходом под углом. Особенно критична невозможность визуально оценить высоту бордюра относительно бампера, что нередко приводит к его касанию или повреждению.
Ключевые последствия и трудности:
- Невозможность точного контроля дистанции до бордюра: Риск упирания бампера в высокий бордюр царапинами или повреждением пластика.
- Искаженное восприятие через оптику: Заложенный угол обзора зеркал "приподнимает" изображение дороги, создавая ложное ощущение большего зазора.
- Ошибка при контроле дистанции до следующей машины: Опасность не рассчитать остановку и "клюнуть" бампером в бампер впереди стоящего авто.
- Усиление проблемы враскачку: При каждом переключении между передней и задней передачей требуется заново оценивать положение невидимой точки, наращивая погрешность.
- Зависимость от вспомогательных систем: Необходимость чрезмерно полагаться на камеры или датчики, которые имеют свои задержки и зоны слепоты.
Компенсировать проблему ориентации на задний бампер можно только комплексно: путем выработки "чувства габаритов" автомобиля на уровне мышечной памяти благодаря практике, установки дополнительных визуальных ориентиров на бампере (разрешенных ПДД меток, антенн) и понимания ограниченности информации от парктроников и камеры, особенно по краям изображения и по высоте. Этот навык требует адаптации для каждого конкретного автомобиля.
Боязнь столкновения с автомобилем сзади
Водитель часто теряет ощущение габаритов своей машины относительно соседнего автомобиля при заезде в "карман". Недостаточный контроль над траекторией движения или неправильный угол поворота колес могут спровоцировать касание бампера или крыла.
Страх усугубляется ограниченной видимостью через зеркала и при повороте головы, особенно при парковке между крупными транспортными средствами. Водитель опасается резко ударить по тормозу из-за риска инерционного смещения, но медленная скорость также может привести к незамеченному контакту.
Факторы риска при неуверенной парковке
- Ошибка в оценке дистанции до сзади стоящей машины при завершении манёвра
- Резкая работа сцеплением при движении задним ходом
- Непрогнозируемое поведение других участников движения
Ключевая сложность: точный расчёт точки начала поворота руля для "заныривания" без выноса задней части авто за пределы парковочной зоны. Микро-столкновения чаще происходят на последней фазе – при выравнивании колёс.
Риск задеть передний бампер впереди стоящей машины
Этот риск возникает из-за неправильного расчёта траектории движения: водитель слишком поздно начинает выравнивать автомобиль при завершении манёвра либо выбирает изначально неверный угол заезда. Недостаточное расстояние для бокового смещения усугубляет проблему: переднее крыло и бампер приближаются к впереди стоящему ТС при интенсивном вращении руля.
Торцевой контакт особенно вероятен на ограниченном пространстве при попытке "втиснуться" в маленький карман: перегазовка или резкое сцепление с дорогой могут спровоцировать рывок автомобиля вперёд. Водители-новички часто теряют контроль над передней частью авто, фокусируясь исключительно на задних габаритах через зеркала или камеру.
- Типичные ошибки:
- Слишком близкий подход к впереди стоящему автомобилю при старте манёвра
- Игнорирование выворота передних колёс при движении задним ходом
- Резкое отпускание сцепления на механике или подача чрезмерного газа
| Фактор риска | Последствие | Способ снижения |
| Маленькая дистанция до объекта (менее 1 м) | Повреждение краски, трещины на бампере | Маневрировать от линии в 1.2–1.5 метра |
| Скользкое покрытие (дождь, лёд) | Неконтролируемое скольжение передка | Только плавные движения рулём и газом |
Критично опасно при парковке под уклон: откат машины при переключении передач гарантированно приводит к столкновению
Неверный момент для обратной прокрутки руля
Распространённая ошибка – начало обратной прокрутки руля не в тот момент, когда задние колёса автомобиля поравнялись с бампером впереди стоящей машины. Если начать выкручивать руль в исходное положение слишком рано, передняя часть вашего автомобиля рискует задеть бампер переднего соседа. Слишком поздняя прокрутка приводит к тому, что передние колёса оказываются вывернутыми под неверным углом при финальном выравнивании, и машина остаётся криво прижатой к бордюру или далеко от него.
Указанная ошибка нарушает всю геометрию манёвра и порождает цепь проблем: задняя часть авто врезается в бордюр шиной или диском, а переднее крыло "выстреливает" в сторону проезжей части, блокируя полосу движения. Водитель вынужден повторять попытки парковки, создавая помехи другим транспортным средствам и повышая риск столкновения.
- Ранняя прокрутка: Переднее крыло смещается к центру дороги, прижимается к бамперу впереди стоящего авто при завершении.
- Поздняя прокрутка: Заднее колесо упирается в высокий бордюр, передние колёса остаются повёрнутыми, не позволяя завершить манёвр.
- Ошибка расчёта: Отсутствие визуальной ориентации на точку совмещения заднего колеса с элементом соседнего авто.
Потеря визуальных ориентиров при сдаче назад
При движении передом водитель опирается на привычные ориентиры: линию тротуара, габариты впередистоящих машин, дорожную разметку. Эти маркеры хорошо видны через лобовое стекло и позволяют точно оценивать дистанции и траекторию. Однако при сдаче назад кардинально меняется точка обзора – ключевые объекты частично или полностью скрываются от водителя.
Наиболее критична потеря прямой видимости бордюра. Передние стойки кузова, низкая посадка и ограниченный угол обзора через зеркала мешают отслеживать положение заднего колеса относительно границы парковочного кармана. Неправильная оценка дистанции до бордюра часто ведет к наезду на него или слишком большому отступу от края проезжей части, что создает помехи движению.
Основные проблемы и их последствия
| Загороженный объект | Риск |
|---|---|
| Задняя линия парковочного места | Выступание бампера за пределы зоны стоянки |
| Ближний бордюр | Повреждение дисков или резины |
| Задний автомобиль | Столкновение при маневрировании |
| Столбики, конусы | Скрытые препятствия в "мертвой зоне" |
Ситуацию усугубляют погодные факторы: в дождь или темное время суток даже боковые зеркала не обеспечивают достаточный обзор. Ложное чувство безопасности возникает из-за электронных ассистентов – парктроники могут не распознать тонкие столбики или высокий поребрик, а камера заднего вида искажает расстояние в широкоугольном режиме. Для компенсации потери визуальных ориентиров рекомендуется:
- Перед маневром выйти и пешком оценить размеры парковочной ниши
- Установить на крайние точки кузова (например, антенну) дополнительные эффективные маячки
- Отработать связь между положением руля и траекторией на закрытой площадке
Сложности контроля параллельности бордюру
Сложность заключается в отсутствии прямой видимости линии бордюра через боковые зеркала при выравнивании автомобиля, что вынуждает водителя активно поворачивать голову или ориентироваться по косвенным признакам. Неправильная оценка расстояния до препятствий или угла поворота колёс часто приводит к пороговому положению кузова – слишком близко либо далеко от тротуара, что снижает эстетику парковки и мешает другим участникам движения.
Ограниченный обзор из салона мешает точно отслеживать траекторию задних колёс, особенно на уклонах или при наличии высокого бордюра, а необходимость синхронизировать повороты руля со скоростью движения требует идеальной координации. Новички склонны резко корректировать руль, усугубляя отклонение от параллели, превращая манёвр в многократные "подъезды".
Ключевые проблемы
- Ошибки в зеркалах: Искажение расстояния в панорамных зеркалах приводит к столкновению с бордюром или слишком широкому положению.
- Нестабильный ориентир: Использование фар соседних машин вместо чёткой линии тротуара влечёт наезд на поребрик или отдаление от него на 40–50 см.
- Реактивная запаздывающая коррекция: Водитель замечает отклонение на позднем этапе, когда для исправления требуется движение вперёд и повтор парковки.
Неправильная оценка дистанции до дорожного покрытия
Основная сложность заключается в искаженном восприятии глубины пространства при движении задним ходом: водитель нередко ошибочно определяет расстояние между бампером автомобиля и бордюром. Отсутствие прямого визуального контроля над препятствием через заднее стекло и несовершенство зеркал заднего вида усугубляют проблему, особенно у новичков, не имеющих сформированного чувства габаритов машины.
Неточная оценка ведет к двум критичным ошибкам: либо автомобиль остается слишком далеко от края проезжей части, создавая помехи движению, либо происходит наезд колесом на бордюр, что грозит повреждением резины и дисков. Риск увеличивается в условиях плохой видимости (дождь, темное время суток), когда тротуарный край теряется в тени или отражениях.
Распространенные последствия
- Повреждение шин и дисков при жестком контакте с бордюром во время попытки финального выравнивания
- Создание аварийной ситуации из-за выезда передней частью авто на полосу встречного движения при перегазовках
- Необходимость многократных попыток парковки, провоцирующая хаотичные маневры и нервозность
Паника при приближении к припаркованным ТС

Страх повреждения соседних автомобилей резко обостряется по мере сокращения дистанции. Зеркала кажутся недостаточно информативными, машина движется "вслепую", что дополняется давлением от ожидания следующих участников движения. Водитель концентрируется на препятствиях, теряя контроль над траекторией, что провоцирует резкие движения рулём или педалями. Результат – рывки авто, усиливающие ощущение хаоса.
Субъективная оценка габаритов искажается под воздействием стресса, а необходимость одновременного контроля за ориентацией колёс и скоростью выводит из равновесия. Нарастает туннельное зрение: внимание фиксируется на ближайших бамперах, исключая периферийные ориентиры (бордюры, разметка). Мысль "я не впишусь!" запускает цикл панических реакций, мешающих трезво оценить ситуацию.
Последствия эмоционального напряжения
- Физиологические сбои: тремор рук, учащённое дыхание и потливость снижают точность движений.
- Когнитивные ошибки: иррациональные решения (например, отказ от парковки в подходящем месте).
- Риск ДТП: резкое торможение или газ во время манёвра увеличивают шанс столкновения.
| Типичная ошибка | Последствие |
|---|---|
| Слишком ранний поворот руля | Касание бордюра колёсом |
| Фиксация на одном зеркале | Неравномерный зазор между машинами |
Ключевой фактор: Отсутствие отработанного алгоритма действий и привычки к габаритам авто превращает манёвр в источник неуправляемого стресса, блокируя способность к анализу.
Отсутствие чувства габаритов своего автомобиля
Знание точных размеров своего автомобиля, особенно понимание того, где находятся его передний и задний свесы, а также расстояние до задних колес, критически важно для безопасного и точного "заныривания" в ограниченное парковочное пространство при параллельной парковке задним ходом. Водитель, не имеющий четкого ощущения этих ключевых точек и внешних границ кузова, не способен достоверно оценить реальное положение машины относительно других объектов в процессе маневра.
Ошибки в оценке габаритов вызывают целый каскад проблем: страх повредить бампера передней машины при завершении заезда, неспособность предсказать траекторию движения задних колес (что приводит к наезду на бордюр или выпиранию передней части), и, как следствие, вынуждают драматически увеличивать зазоры с соседними авто из-за гигантской погрешности суждений.
- Преувеличенное "окно" для маневра: Водитель ищет место, значительно превышающее длину его машины, так как не уверен, что сможет вписаться в стандартный промежуток.
- Многократные "раскачивания": Из-за непонимания реального перемещения задней и передней частей автомобиля требуется гораздо больше попыток "назад-вперед", чтобы занять конечную позицию.
- Проблема захода под углом: Определение правильного момента для начала поворота руля при заезде в "карман" затруднено, так как неясно, где в данный момент находится задняя ось относительно препятствий.
- Риск наезда на пешехода/велосипедиста: Концентрация на бордюрах и других машинах может привести к потере из виду участников движения позади автомобиля, а незнание заднего габарита усугубляет опасность.
Трудности при маневрировании в узких улочках
Главной проблемой становится критический дефицит пространства для выполнения манёвров. Водитель вынужден учитывать минимальные допуски между бортами автомобиля и препятствиями (другие ТС, столбы, элементы зданий), что требует ювелирной точности руления и постоянной коррекции траектории. Любая ошибка в расчёте габаритов или угла поворота грозит столкновением.
Особые сложности возникают при проезде участков с крутыми поворотами, архитектурными выступами или сужением проезжей части из-за припаркованного транспорта. Невозможность развернуть руль на нужный угол в один приём зачастую вынуждает совершать серию последовательных движений вперёд-назад, теряя время и создавая помехи движению.
- Ограниченный обзор: Высокие ограждения, плотная застройка и близость других машин сокращают сектор обзора, особенно в задней полусфере.
- Риск "мёртвых зон": Пешеходы, велосипедисты или мелкие препятствия легко попадают в невидимые при парковке зоны.
- Непредсказуемость среды: Внезапное появление встречного транспорта требует мгновенной реакции и поиска "кармана" для разъезда.
| Фактор риска | Последствие |
| Колея и неровности дороги | Самопроизвольное смещение авто с траектории |
| Вынужденный разворот в несколько приёмов | Повышенный износ сцепления и рулевого механизма |
Ошибки в расчёте траектории задних колес
Неспособность точно определить радиус поворота задней оси является ключевой проблемой. Водители часто ошибочно проецируют динамику передних колёс на задние, не учитывая принципиальной разницы: задние колёса при повороте руля смещаются внутрь поворота по более агрессивной дуге, "срезая" угол.
Другая распространённая ошибка - поздняя или непоследовательная корректировка рулевого управления. Возникающие ошибки в начальной фазе манёвра лавинообразно искажают последующую траекторию из-за возрастающего угла выворота колёс и бокового смещения заднего моста.
Последствия и сопутствующие факторы

- Расчёт расстояния до соседних авто: Недооценка бокового смещения кузова при вхождении в парковочный карман ведёт к риску столкновения с припаркованными машинами.
- Геометрия автомобиля: Игнорирование разницы между оборотом руля на премиальных авто (уменьшённый угол поворота колёс) и бюджетными моделями вызывает отклонения от требуемой траектории.
- Работа зеркал: Опора исключительно на зеркала заднего вида без контроля через плечо приводит к потере ориентиров (бордюр, разметка) и неправильной оценке скорости "заныривания".
Трудности, вызванные неумением использовать мертвые зоны зеркал
Непонимание расположения мертвых зон в зеркалах заднего вида и боковых зеркалах приводит к критическим ошибкам при параллельной парковке. Водители, не корректирующие положение головы для контроля слепых участков, часто не замечают пешеходов, велосипедистов или припаркованные автомобили при движении задним ходом. Это провоцирует резкие маневры в последний момент, сбивающие траекторию парковки и увеличивающие риск столкновения.
Игнорирование мертвых зон заставляет водителей полностью полагаться на центральное зеркало, что создает ложное ощущение безопасности. Боковые смещения транспортного средства при "заезде" в карман остаются неконтролируемыми, из-за чего автомобиль часто занимает положение под углом к бордюру или выходит за пределы разметки. Необходимость повторных попыток парковки из-за такой ошибки блокирует поток движения и провоцирует конфликты с другими участниками.
- Ограниченный охват: Статичное положение зеркал не отражает зоны в непосредственной близости к бамперам.
- Ложный контроль дистанции: Объекты в мертвых зонах визуально "исчезают", мешая оценить расстояние до соседних авто.
Трудности выравнивания авто после заезда

Основная сложность возникает из-за неточного первоначального позиционирования: машина часто останавливается либо слишком далеко от бордюра (более 30-50 см), либо прижимается к нему вплотную. Неправильный угол заезда провоцирует цепную реакцию ошибок – при попытке исправить положение передняя шина цепляет бордюр, а заднее колесо уходит на проезжую часть.
Другая проблема – неконтролируемое виляние корпусом при корректировке позиции. Водители инстинктивно выкручивают руль до упора, что приводит к резкой траектории "глубоко-мелко". Начинающие часто забывают о конце авто: выравнивая переднюю часть, они сталкиваются с тем, что задний бампер полностью перегораживает соседнюю машину или блокирует движение.
- Ошибки в работе педалями: чересчур резкое сцепление провоцирует рывки, а позднее переключение с задней на первую передачу затягивает манёвр;
- Подвижные ориентиры: полное сосредоточение на зеркалах мешает отслеживать смещение передних колес относительно бордюра;
- Геометрия автомобиля: длинный передний свес искажает визуальное восприятие дистанции до впереди стоящей машины.
Проблемы с контролем скорости при движении назад
Основная сложность заключается в неестественном для водителя положении тела: при развороте вполоборота контроль педали газа осуществляется пяткой, которая менее чувствительна к усилиям, чем носок. Добавляет сложностей и обратная логика рулевого управления – поворот руля вправо направляет автомобиль вправо, но при движении задним ходом это ведёт к неочевидному смещению передней части кузова в противоположную сторону.
Ошибки в дозировании скорости часто приводят к критическим последствиям: слишком резкий газ провоцирует удар в автомобиль сзади или бордюр, а недостаточная скорость не позволяет завершить манёвр в стеснённых условиях, вынуждая начинать парковку заново. Особенно опасна высокая скорость при близком расстоянии до препятствий – из-за ограниченного обзора через зеркала водитель физически не успевает среагировать на изменение дистанции.
Типичные риски из-за ошибок контроля скорости:
- Резкий толчок при остановке → повреждение бамперов
- «Недокат» до нужной позиции → блокировка проезда другим ТС
- Заезд на бордюр → деформация дисков/шин
| Ошибка | Причина | Результат |
|---|---|---|
| Рывковое движение | Резкое нажатие сцепления | Столкновение с объектом сзади |
| Инерционный закат | Непогашенная скорость перед торможением | Наезд на бордюр/тротуар |
Чувствительность управления усугубляется особенностью передачи заднего хода: на большинстве авто она имеет более короткое передаточное число, чем первая, что усиливает реакцию на нажатие газа. Новички часто усугубляют проблему, полностью отпуская сцепление – механическая коробка в таком случае выдаёт максимальный крутящий момент даже при лёгком касании педали акселератора.
Список источников
При подготовке материала о сложностях параллельной парковки задним ходом целесообразно опираться на специализированные публикации. Научные исследования и методические пособия помогают систематизировать типичные ошибки водителей и анатомию трудностей данного маневра.
Достоверные практические рекомендации содержатся в современных учебниках по вождению и официальных документах регулирующих органов. Интернет-ресурсы с экспертными анализами дополняют картину реальными кейсами из повседневной практики.
- Учебник: Г. Бранихин "Основы управления автомобилем и безопасность движения". Раздел "Маневрирование в ограниченном пространстве"
- Инструкция: Методическое пособие ГИБДД РФ "Подготовка водителей категории В". Глава "Особенности парковочных маневров"
- Научная статья: Петров А.И. "Психофизиологические аспекты сложных маневров при управлении ТС" в журнале "Автотранспортная психология" 2021(4)
- Исследование: Сидорова Е.К. "Факторы аварийности при парковочных маневрах" М.: Академия транспорта 2019
- Практическое руководство: Школа экстремального вождения "МастерКласс". "Алгоритмы безошибочной парковки"
- Отраслевой стандарт: ГОСТ Р 58438-2021 "Требования к подготовке водителей легкового транспорта"
- Экспертная статья: "Эргономика парковки задним ходом: когнитивные искажения" на портале Автонаука.ру