Устройство ограничения скорости - история и принцип действия
Статья обновлена: 28.02.2026
Скорость движения транспорта всегда требовала контроля для обеспечения безопасности. Устройство ограничения скорости стало ключевым техническим решением этой задачи.
Первые механические ограничители появились в начале XX века. Современные электронные системы используют датчики скорости и блок управления. Принцип работы основан на сравнении фактической скорости с заданным пределом.
Центробежный механизм Уатта: основа первых конструкций
Джеймс Уатт разработал центробежный регулятор в 1788 году для паровых машин, где требовалось поддерживать стабильную скорость вращения вала при переменной нагрузке. Принцип работы основывался на использовании инерции грузов: два шарообразных груза крепились к вертикальному валу через шарнирные рычаги, соединённые с дроссельной заслонкой парового котла.
При увеличении скорости вращения вала центробежная сила отбрасывала грузы наружу, поднимая муфту и рычажную систему. Это движение частично перекрывало подачу пара через заслонку, снижая мощность машины. При замедлении вращения грузы опускались вниз под действием силы тяжести, открывая заслонку и увеличивая подачу пара для ускорения вала.
Ключевые элементы конструкции
- Вертикальный вал: Жёстко соединён с выходным валом машины.
- Центробежные грузы: Пара металлических шаров, закреплённых на шарнирах.
- Подвижная муфта: Передавала движение грузов на заслонку.
- Рычажная передача: Связывала муфту с дроссельным клапаном.
| Состояние машины | Действие регулятора | Результат |
|---|---|---|
| Превышение скорости | Грузы расходятся → муфта поднимается | Заслонка прикрывается → подача пара уменьшается |
| Снижение скорости | Грузы сближаются → муфта опускается | Заслонка открывается → подача пара возрастает |
Главным ограничением механизма была нелинейная зависимость между скоростью и положением грузов, что вызывало колебания («охоту») при резких нагрузках. Для компенсации этого эффекта позднее добавили пружины, корректирующие силу сопротивления.
Механические ограничители для паровозов XIX века

Необходимость контроля скорости паровозов возникла с ростом их мощности и массовых перевозок, где превышение допустимых параметров движения приводило к сходам с рельсов и катастрофам. Первые механические ограничители создавались как ответ на отсутствие автоматизированных систем безопасности, полагаясь исключительно на инженерные решения без электронных компонентов.
Принцип работы основывался на механической связи между вращением ведущих осей и регулирующим механизмом. Центробежные регуляторы, аналогичные использовавшимся в паровых машинах, приводились в действие через шестерёнчатую передачу от оси локомотива. При достижении критической скорости грузы регулятора под действием центробежной силы расходились, воздействуя на рычажную систему, которая либо перекрывала подачу пара в цилиндры, либо активировала тормозную магистраль.
Типы и особенности устройств

- Центробежные клапаны: Срабатывали при раскручивании маховика с грузами, перекрывая паропровод через пружинный толкатель.
- Маятниковые ограничители: Использовали качающийся груз на эксцентрике; при резонансных колебаниях на высоких скоростях он зацеплял стопорную рамку, включая тормоза.
- Регуляторы с инерционными муфтами: Механизм смещался по наклонной плоскости под действием инерции, размыкая привод дросселя.
| Ключевой недостаток | Причина | Последствие |
| Запаздывание реакции | Инерция механических компонентов | Превышение скорости до блокировки пара |
| Низкая точность | Трение в шарнирах, износ деталей | Погрешность до 15-20% от заданного предела |
Эффективность систем снижалась из-за необходимости ручной настройки под конкретный паровоз и постоянного обслуживания: очистки от копоти, регулировки пружин, замены изношенных тяг. Несмотря на это, они заложили основу для развития автоматических ограничителей, доказав жизнеспособность принципа прямой механической обратной связи с ходовой частью.
Появление пневматических регуляторов в автомобилях
Первые пневматические регуляторы скорости появились в 1940-х годах как механическое решение для поддержания постоянной скорости без участия водителя. Их разработка была вызвана ростом скоростей автомобилей и необходимостью снижения утомляемости при длительных поездках. Системы использовали вакуум двигателя для управления дроссельной заслонкой через диафрагмы и клапаны.
Пионером стала американская компания Minneapolis-Honeywell (1945 г.), создавшая "Auto-Pilot" для Chrysler. Устройство анализировало разницу между вакуумом во впускном коллекторе и эталонным вакуумом от скоростного насоса. При превышении заданной скорости клапан приоткрывал дроссель, снижая тягу.
Ключевые конструктивные элементы
Основные компоненты ранних систем включали:
- Вакуумный насос с центробежным регулятором (приводился от спидометра)
- Диафрагменный блок с пружинным механизмом
- Сервоклапан управления вакуумной магистралью
- Рычажный привод дроссельной заслонки
| Преимущества | Недостатки |
|---|---|
| Простота конструкции | Зависимость от герметичности вакуумных линий |
| Отсутствие электропитания | Задержка срабатывания (0.5-2 сек) |
| Совместимость с карбюраторными двигателями | Низкая точность (±3-5 км/ч) |
В 1958 году Chrysler представил Auto-Pilot с электронным контролем вакуумных клапанов, что повысило точность до ±1.5 км/ч. Технология доминировала до середины 1970-х, когда электронные системы начали использовать шаговые двигатели для прямого управления дросселем.
Внедрение вакуумных устройств на грузовом транспорте

Первые вакуумные регуляторы скорости для грузовиков появились в 1950-х годах как ответ на растущие требования к безопасности при увеличении мощности дизельных двигателей. Системы использовали разрежение во впускном коллекторе для автоматического ограничения подачи топлива при достижении заданного скоростного порога, заменяя менее надежные механические ограничители.
Ключевым компонентом стал вакуумный клапан, связанный с педалью акселератора и топливным насосом высокого давления. При превышении скорости разрежение в системе падало, диафрагма регулятора перемещала тягу и сокращала подачу дизельного топлива независимо от положения педали. Это предотвращало опасные режимы работы двигателя на спусках.
Особенности технической реализации

Внедрение потребовало модификации нескольких систем:
- Топливная аппаратура: интеграция вакуумной камеры с ТНВД через рычажный механизм
- Вакуумные магистрали: медные трубки от коллектора к регулятору с обратными клапанами
- Калибровка: точная настройка пружин диафрагмы под характеристики двигателя
| Период | Развитие систем | Типичные применения |
|---|---|---|
| 1950-1960-е | Простые клапанные регуляторы | Магистральные тягачи Scania, MAN |
| 1970-е | Комбинированные системы с датчиками нагрузки | Самосвалы Komatsu, БелАЗ |
Главным преимуществом вакуумных ограничителей стала прямая зависимость от нагрузки двигателя: при движении под уклон разрежение в коллекторе падало быстрее, обеспечивая раннее срабатывание. Это существенно снижало риски заносов многотонных фур при торможении моторным тормозом.
Связь дроссельной заслонки с ограничителем скорости
Ограничитель скорости воздействует непосредственно на дроссельную заслонку – ключевой элемент управления подачей воздуха в двигатель. При достижении заданной скорости система перехватывает управление заслонкой, блокируя её дальнейшее открытие независимо от положения педали акселератора. Это достигается через механическое, пневматическое или электронное вмешательство в систему привода дросселя.
В электронных системах (drive-by-wire) блок управления двигателем (ЭБУ) получает сигнал от датчиков скорости и сравнивает его с установленным лимитом. При превышении лимита ЭБУ игнорирует команды на увеличение подачи топлива от педали газа, удерживая угол открытия заслонки на текущем уровне или плавно уменьшая его. Механические ограничители используют муфты или кулачки, физически препятствующие перемещению троса дросселя.
Ключевые принципы взаимодействия
- Обратная связь по скорости: Датчики колес или трансмиссии непрерывно передают данные о фактической скорости транспортного средства.
- Актуация дросселя: Принудительное ограничение хода заслонки через:
- Электромотор привода (в электронных системах)
- Пневмоцилиндр (в грузовом транспорте)
- Механический стопор (в системах с тросовым приводом)
- Приоритет безопасности: Система сохраняет возможность полного закрытия заслонки для экстренного торможения двигателем и мгновенно деактивируется при нажатии на тормоз.
| Тип привода дросселя | Метод ограничения | Реакция на педаль газа |
|---|---|---|
| Механический (трос) | Физический упор на секторе заслонки | Педаль упирается в сопротивление |
| Электронный (drive-by-wire) | Корректировка сигнала ЭБУ | Педаль двигается свободно, но без эффекта |
Важно: Ограничитель не вмешивается в работу тормозной системы и не снижает мощность двигателя напрямую – он лишь предотвращает увеличение подачи топливовоздушной смеси сверх расчётного значения, соответствующего заданной скорости.
Электрические датчики Холла для измерения оборотов
Датчики Холла применяются в системах контроля скорости для точного определения частоты вращения валов двигателя или колёс. Они функционируют на основе эффекта Холла, генерируя электрический сигнал при изменении магнитного поля. Для измерения оборотов магнитный элемент (постоянный магнит или кольцо с намагниченными сегментами) крепится на вращающуюся деталь, а датчик фиксируется неподвижно в зоне её движения.
При прохождении магнитных меток мимо чувствительного элемента датчика формируется серия импульсов напряжения. Частота этих импульсов прямо пропорциональна скорости вращения контролируемого объекта. Полученные данные передаются в электронный блок управления, который рассчитывает текущие обороты и сравнивает их с установленными ограничениями.
Принцип работы и ключевые характеристики
Основные этапы преобразования вращения в сигнал:
- Магнитное поле изменяется при прохождении ферромагнитных выступов/впадин ротора мимо сенсора.
- Эффект Холла вызывает отклонение электронов в полупроводниковой пластине датчика.
- Генерация разности потенциалов (напряжения Холла) на гранях пластины.
- Усиление и преобразование сигнала в цифровые импульсы встроенной схемой.
Преимущества перед индуктивными датчиками:
- Работают на нулевых скоростях вращения
- Высокая точность в широком диапазоне частот
- Не подвержены влиянию вибраций и загрязнений
- Компактные размеры и низкое энергопотребление
| Параметр | Диапазон значений |
| Рабочая частота | 0-25 кГц |
| Температурный диапазон | -40°C до +150°C |
| Выходной сигнал | Цифровой (NPN/PNP) или аналоговый |
| Защита от помех | До 2 кВ (электростатический разряд) |
В устройствах ограничения скорости эти датчики обеспечивают непрерывный мониторинг без механического контакта. При превышении допустимых оборотов система автоматически корректирует подачу топлива или активирует тормозные механизмы. Отказоустойчивость достигается дублированием сенсоров и программной диагностикой импульсных последовательностей.
Принцип работы магнитного датчика скорости вращения
Магнитный датчик скорости вращения функционирует на основе изменения магнитного поля при вращении задающего диска (ротора) с зубьями или магнитными метками. При прохождении каждого зуба мимо чувствительного элемента возникает возмущение магнитного потока, которое преобразуется в электрический сигнал. Основные физические принципы включают эффект Холла или электромагнитную индукцию, в зависимости от конструкции датчика.
В датчиках на эффекте Холла постоянный магнит создает статическое поле, а полупроводниковый элемент фиксирует его изменения при движении зубьев ротора. Индуктивные датчики используют катушку, в которой при изменении магнитного потока наводится ЭДС. В обоих случаях частота генерируемых импульсов прямо пропорциональна угловой скорости вращения вала: чем выше скорость, тем чаще следуют импульсы.
Ключевые этапы преобразования сигнала
- Обнаружение изменений поля: Зубья/метки ротора модулируют магнитный поток в зоне датчика.
- Генерация сигнала:
- В датчиках Холла – изменение напряжения на чувствительном элементе
- В индуктивных – возникновение переменной ЭДС в катушке
- Формирование импульсов: Аналоговый сигнал усиливается и преобразуется в цифровые импульсы прямоугольной формы.
- Передача данных: Импульсы поступают в блок управления, где частота сигнала рассчитывается в реальном времени по формуле: Скорость (об/мин) = (Частота импульсов × 60) / Количество меток на роторе.
Электронный блок управления: анализ сигналов датчиков
Электронный блок управления (ЭБУ) является вычислительным центром системы ограничения скорости. Он непрерывно получает в реальном времени электрические сигналы от нескольких ключевых датчиков транспортного средства. Основными источниками информации для ЭБУ в контексте ограничения скорости выступают датчик частоты вращения коленчатого вала двигателя, датчики скорости вращения колес (чаще всего входящие в систему ABS) и датчик положения дроссельной заслонки.
Поступающие от датчиков аналоговые или цифровые сигналы преобразуются микропроцессором ЭБУ в понятные ему числовые значения, отражающие текущие параметры движения. Микропроцессор постоянно сравнивает фактическую скорость автомобиля, рассчитанную на основе этих сигналов (например, по частоте вращения колес или коленвала), с заданным водителем предельным значением скорости. Алгоритм, заложенный в память ЭБУ, определяет логику реакции системы на это сравнение.
Принцип анализа и реакции
Анализ сигналов происходит циклически с высокой частотой. Если вычисленная скорость превышает установленный лимит, алгоритм ЭБУ инициирует действия по ее снижению. Это достигается путем отправки управляющих команд на исполнительные механизмы:
- Дроссельная заслонка: Снижение угла открытия заслонки через электронное управление (электронная педаль газа, ETC) для уменьшения подачи воздуха и топлива.
- Топливная система: Корректировка длительности впрыска форсунок для временного уменьшения количества подаваемого топлива.
- Тормозная система (в некоторых сложных системах): Избирательное подтормаживание колес через систему ABS/ESP для создания тормозного усилия.
ЭБУ постоянно мониторит сигналы после вмешательства, обеспечивая плавное поддержание скорости на заданном уровне или ее снижение до этого уровня. При снижении скорости ниже лимита управляющее воздействие прекращается, возвращая полный контроль водителю. Важным аспектом является фильтрация и проверка достоверности сигналов датчиков для предотвращения ошибочных срабатываний.
Алгоритм ограничения топливоподачи при превышении скорости
Электронный блок управления (ЭБУ) двигателя непрерывно сравнивает текущую скорость автомобиля с заданным водителем пределом через сигналы датчиков ABS или коробки передач. При фиксации превышения порогового значения система активирует режим ограничения топливоподачи для принудительного снижения мощности силового агрегата.
Алгоритм реализуется путём сокращения длительности импульсов впрыска топливных форсунок либо уменьшения угла опережения зажигания. Это вызывает контролируемое падение крутящего момента без полного отключения двигателя, позволяя сохранять управляемость.
- Мониторинг скорости: Датчики колес/трансмиссии передают данные в ЭБУ 20-50 раз в секунду.
- Сравнение с порогом: ЭБУ сопоставляет фактическую скорость с установленным лимитом (например, 90 км/ч).
- Активация ограничения: При превышении лимита >2-3 км/ч блок инициирует коррекцию топливоподачи.
- Корректирующее воздействие:
- Сокращение времени открытия форсунок на 15-40%
- Сдвиг угла опережения зажигания до -10°
- Восстановление подачи: При снижении скорости ниже порога +2 км/ч ЭБУ возвращает штатные параметры впрыска.
| Параметр | Нормальный режим | Режим ограничения |
|---|---|---|
| Длительность впрыска | 2.5-8 мс | 1.5-5 мс |
| Угол опережения зажигания | 5°-40° | -5°-10° |
| Реакция на педаль газа | Полная | Ограничена до 70% |
Система работает циклически: при повторном превышении алгоритм запускается заново. Отключение происходит только при ручном сбросе установленного лимита водителем или выключении зажигания.
Механизм принудительного закрытия дросселя
При достижении транспортным средством заданной предельной скорости устройство ограничения скорости активирует механизм принудительного закрытия дроссельной заслонки. Этот процесс происходит независимо от положения педали акселератора, на которую воздействует водитель. Основная задача механизма – прервать или существенно ограничить подачу топливовоздушной смеси в двигатель, тем самым снижая его мощность и предотвращая дальнейший разгон.
Физическое воздействие на дроссельный узел реализуется через исполнительное устройство, напрямую связанное с системой управления двигателем (ЭБУ). Механизм переводит заслонку в положение, близкое к холостому ходу, либо плавно уменьшает угол ее открытия до безопасного значения. Это создает эффект "принудительного сброса газа", заставляя автомобиль замедляться или стабилизировать скорость на заданном уровне, даже если водитель продолжает удерживать педаль акселератора.
Принцип работы и компоненты
Ключевыми элементами системы принудительного закрытия являются:
- Датчики скорости: непрерывно передают данные о текущей скорости вращения колес или выходного вала КПП на электронный блок управления (ЭБУ).
- Электронный блок управления (ЭБУ): сравнивает фактическую скорость с заданным пределом. При превышении порога формирует управляющий сигнал для исполнительного механизма.
- Исполнительный механизм:
- Электромеханический привод (например, сервомотор или соленоид): получает сигнал от ЭБУ и механически воздействует на тягу дросселя или непосредственно на ось заслонки, преодолевая усилие пружины и нажатие педали газа.
- Электронная дроссельная заслонка (Drive-by-Wire): в современных системах ЭБУ напрямую уменьшает угол открытия заслонки через ее штатный электропривод, игнорируя сигнал от датчика положения педали акселератора.
- Аварийный размыкатель: обычно кнопка или рычаг, позволяющий водителю вручную отключить принудительное ограничение в экстренной ситуации (например, для обгона).
Принцип работы основан на приоритете системы безопасности над командой водителя. Как только скорость падает ниже установленного предела, механизм плавно ослабляет воздействие, возвращая управление дросселем водителю. Система функционирует циклически, постоянно корректируя положение заслонки для поддержания безопасной скорости без полной потери управляемости.
Интеграция с CAN-шиной для данных одометра
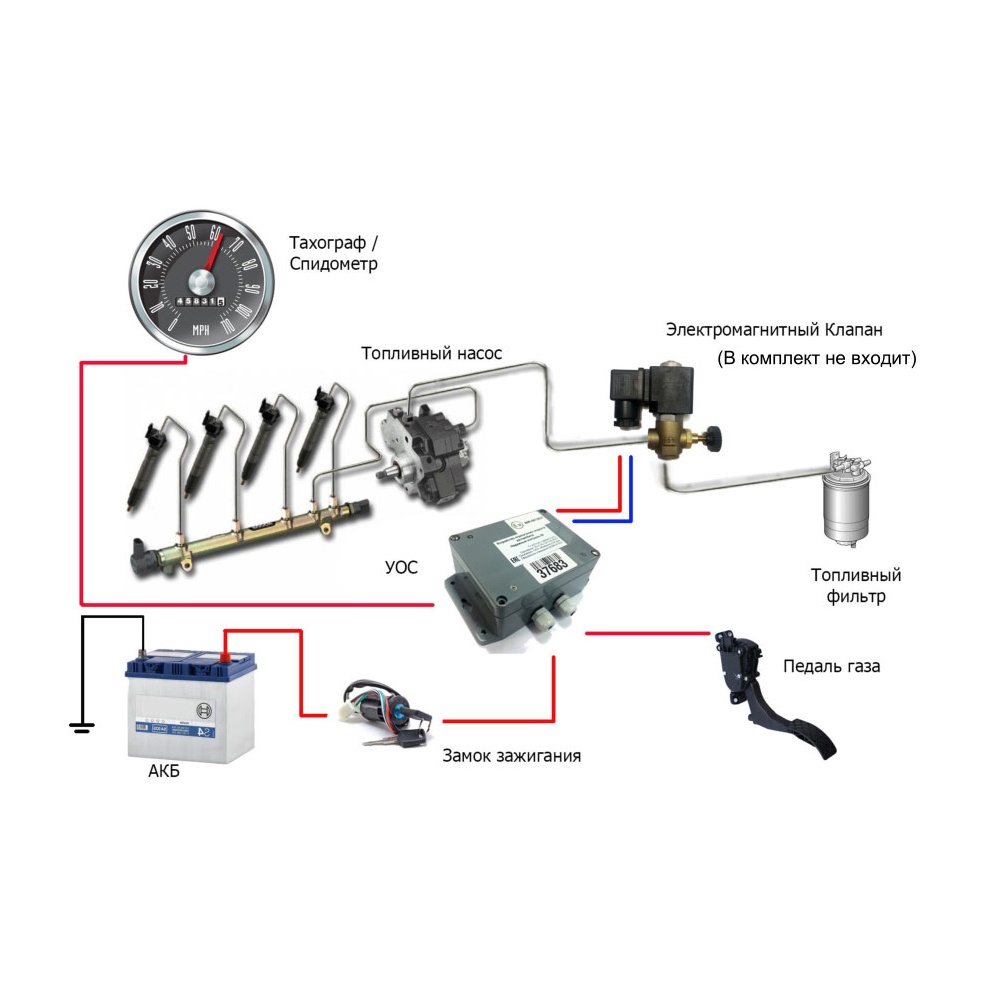
Современные устройства ограничения скорости (УОС) получают данные одометра напрямую через CAN-шину транспортного средства, что исключает необходимость установки дополнительных датчиков или механических вметшательств в конструкцию. CAN-шина объединяет электронные блоки управления (ЭБУ) автомобиля в единую сеть, обеспечивая обмен параметрами в реальном времени, включая скорость вращения колес, частоту оборотов двигателя и пройденное расстояние.
УОС подключается к CAN-интерфейсу через диагностический разъем OBD-II, идентифицируя специфичные идентификаторы (CAN ID), соответствующие пакетам данных одометра. Для корректной интерпретации информации устройство использует предварительно загруженную базу матриц декодирования, уникальных для каждой модели автомобиля. Эти матрицы определяют битовую маску, смещение данных в кадре и формулы преобразования сырых значений в физические величины (км/ч или км).
Принцип обработки данных
Алгоритм работы включает четыре ключевых этапа:
- Фильтрация CAN-трафика: Аппаратный контроллер УОС отсеивает кадры, не содержащие целевых идентификаторов одометра.
- Декодирование сигналов: Применение матриц к выделенным CAN-кадрам для преобразования битовых последовательностей в числовые значения скорости/пробега.
- Валидация данных: Сравнение показаний с соседними ЭБУ (например, ABS и двигателя) для исключения противоречивых сигналов.
- Коррекция погрешностей: Компенсация расхождений, вызванных разным давлением в шинах или износом протектора, через калибровочные коэффициенты.
При нарушении заданного скоростного лимита УОС инициирует ответные действия:
| Тип реакции | Механизм реализации |
|---|---|
| Звуковое предупреждение | Активация звукового сигнала через CAN-команду бортовой аудиосистеме |
| Снижение мощности | Отправка запроса ЭБУ двигателя на ограничение подачи топлива |
| Фиксация нарушений | Запись в энергонезависимую память УОС меток времени, скорости и координат GPS |
Для обеспечения отказоустойчивости дублирующие данные одометра считываются одновременно с нескольких ЭБУ, а при пропадании CAN-связи используется резервный сигнал с датчика скорости коробки передач. Совместимость с различными протоколами шины (CAN 2.0A/B, J1939, ISO 15765) достигается за счет программируемых драйверов интерфейса.
Системы OBD-II: стандартизация диагностики ограничителей
Стандарт OBD-II (On-Board Diagnostics II), введённый в США с 1996 года и распространившийся глобально, унифицировал протоколы обмена данными между электронными блоками управления (ЭБУ) автомобиля и внешними диагностическими приборами. Это позволило создать единый 16-контактный диагностический разъём (DLC), обеспечивающий доступ к параметрам работы двигателя, трансмиссии и вспомогательных систем, включая функцию ограничения скорости.
Для систем ограничения скорости OBD-II стал ключевым инструментом мониторинга и верификации. Диагностические сканеры через стандартизированные коды неисправностей (DTC – Diagnostic Trouble Codes) могут выявлять сбои в цепи управления дроссельной заслонкой, датчиках скорости или программных алгоритмах ограничителя. Например, код P0571 сигнализирует о неполадках в цепи контроля круиз-контроля/ограничителя.
Влияние стандарта на диагностику ограничителей
Унификация OBD-II обеспечила:
- Сквозную проверку: сканирование работы ограничителя от датчиков скорости (через шину CAN) до исполнительных механизмов (электронной педали акселератора, ЭБУ двигателя).
- Чтение параметров в реальном времени: мониторинг заданной/фактической скорости, положения дросселя, статуса активации системы.
- Калибровку и адаптацию: сброс адаптаций дроссельного узла после ремонта, программную активацию функции (на моделях с опциональным ограничителем).
Принцип диагностики основан на постоянном сопоставлении данных:
- ЭБУ двигателя получает сигналы от датчиков скорости колес/трансмиссии.
- При достижении лимита блок ограничителя (интегрированный в ЭБУ или отдельный модуль) корректирует топливоподачу или угол открытия дросселя.
- OBD-II фиксирует расхождения между целевой скоростью (заданной водителем/производителем) и фактической, а также реакцию исполнительных элементов.
| Компонент | Роль в диагностике ограничителя |
|---|---|
| Датчик скорости колеса | Первичный источник данных о скорости для ЭБУ и OBD-II |
| ЭБУ двигателя | Обрабатывает сигналы, управляет дросселем/впрыском при срабатывании ограничителя |
| Диагностический разъём (DLC) | Физический интерфейс для подключения сканера |
Стандартизация OBD-II существенно упростила выявление типовых неисправностей: обрыв проводки датчиков, механические заедания дроссельной заслонки, программные ошибки калибровки. Это позволяет оперативно проводить регламентные проверки ограничителей скорости, особенно на коммерческом транспорте, где их исправность критична для безопасности.
Адаптивные ограничители с распознаванием дорожных знаков
Системы интегрируют камеры и алгоритмы компьютерного зрения для автоматического считывания дорожных знаков, определяющих актуальное ограничение скорости. Полученные данные сопоставляются с картографической информацией и текущими параметрами движения автомобиля (например, включенным поворотником или активацией дворников), что позволяет точно идентифицировать действующие правила для конкретного участка дороги.
На основе распознанных знаков электронный блок управления динамически корректирует предельную скорость транспортного средства. При превышении установленного лимита система последовательно применяет предупреждающие сигналы (визуальные, звуковые), а затем автоматически снижает крутящий момент двигателя или мягко притормаживает. Функция сохраняет возможность временного отключения водителем для выполнения обгона.
Ключевые компоненты и принцип работы
- Фронтальная камера: фиксирует знаки, дорожную разметку и инфраструктуру с частотой 30-60 кадров/с.
- Обработка изображений: нейросети классифицируют объекты, фильтруя ложные срабатывания (реклама, знаки на соседних полосах).
- Fusion-система: объединяет данные камеры, GPS, навигационных карт и датчиков дождя/света.
| Этап работы | Действие системы |
| Обнаружение знака | Анализ формы, цвета и символов с учётом погодных условий |
| Верификация | Сопоставление с картографическими данными и контекстом движения |
| Коррекция скорости | Плавное ограничение ускорения или активация тормозов |
Современные системы (например, Traffic Sign Recognition в BMW, Peugeot, Mercedes) адаптируются к временным знакам, зонам действия ограничений и условиям видимости. При потере знака из виду используется последнее зафиксированное значение до получения новых данных или изменения дорожной ситуации.
Картографическое ограничение через навигационные системы

Принцип картографического ограничения скорости основан на интеграции данных о допустимой скорости на конкретных участках дорог, хранящихся в цифровых картах навигационных систем. Когда транспортное средство оснащено GPS/ГЛОНАСС-приемником и электронной картой, система непрерывно сопоставляет текущие координаты автомобиля с актуальными скоростными ограничениями для данной геолокации. Это позволяет определять разрешенную скорость без физических датчиков дорожных знаков.
Точность системы напрямую зависит от детализации картографических данных и частоты обновления карт. Производители навигационного ПО сотрудничают с картографическими сервисами (HERE Technologies, OpenStreetMap) для регулярного внесения изменений: новых знаков, временных ограничений в зонах ремонта дорог или особенностей местного законодательства. Ключевое преимущество – возможность предупреждать водителя о предстоящем изменении скоростного режима за 500-1000 метров до зоны действия ограничения.
Техническая реализация и ограничения
Алгоритм работы включает три этапа:
- Геопозиционирование: GPS-модуль определяет координаты, направление и скорость автомобиля с точностью до 1-3 метров.
- Сверка с картой: Навигационный блок загружает из памяти скоростные лимиты для текущего сегмента дороги и смежных участков.
- Анализ контекста: Система учитывает дополнительные факторы:
- Тип дороги (автострада, городская улица, жилая зона)
- Действующие временные ограничения (дорожные работы, аварии)
- Погодные условия (при интеграции с метеодатчиками)
Основные ограничения технологии:
| Фактор | Влияние на систему |
|---|---|
| Задержка обновления карт | Новые знаки или измененные ПДД могут не отображаться до следующего апдейта ПО |
| Ошибки позиционирования | В тоннелях или "каньонах" небоскребов GPS-сигнал теряется |
| Сложные дорожные развязки | Система может ошибочно определить принадлежность к дороге при параллельных трассах |
Современные решения комбинируют картографический метод с распознаванием дорожных знаков через камеры, нивелируя часть недостатков. Например, если камера фиксирует знак "40 км/ч", а карта указывает "60 км/ч", приоритет отдается визуальным данным. Такая гибридизация повышает надежность до 95-98%.
RFID-метки в дорожном полотне для зонального контроля
Система использует пассивные RFID-транспондеры, встраиваемые в асфальт на критичных участках: у школ, пешеходных переходов, зон ремонта. Каждая метка содержит уникальный цифровой код, идентифицирующий тип зоны контроля и допустимую скорость.
Транспортные средства оснащаются бортовыми RFID-считывателями и блоком обработки данных. При наезде колеса на метку считыватель активирует её электромагнитным полем, получает закодированную информацию о параметрах зоны и передает данные в электронный контрольный модуль автомобиля.
Принцип взаимодействия и управления
Алгоритм работы системы включает три этапа:
- Идентификация зоны: Считыватель распознаёт тип ограничения (например, "Школа: 30 км/ч").
- Сравнение параметров: Бортовой компьютер сопоставляет текущую скорость ТС с разрешённым значением.
- Реакция системы:
- Визуальное/звуковое оповещение водителя
- Автоматическое снижение скорости через адаптивный круиз-контроль (при интеграции)
- Фиксация нарушения в журнале телематики
Ключевые преимущества технологии:
| Точность позиционирования | Контроль скорости в границах метки (±1 метр) |
| Независимость от погоды | Работоспособность при снеге, дожде, тумане |
| Динамическое обновление | Возможность дистанционного изменения параметров меток |
Интеграция с системами телематики позволяет передавать данные о нарушениях в центры мониторинга, а при использовании V2I (Vehicle-to-Infrastructure) – синхронизировать работу светофоров и дорожных знаков.
Калибровка ограничителей при замене шин
Замена шин с иными геометрическими параметрами напрямую влияет на точность работы электронных ограничителей скорости. Диаметр колеса определяет пройденное расстояние за один оборот: установка шин большего или меньшего размера изменяет фактическую скорость автомобиля относительно показаний датчиков ABS/ESP, передающих данные в систему ограничения.
Некорректные показания приводят к ложному срабатыванию или игнорированию лимита скорости. Например, при увеличении диаметра колес реальная скорость превысит расчетную, что деактивирует ограничитель в заданном диапазоне. Для предотвращения рисков требуется программная калибровка блоков управления.
Процедура адаптации
Калибровка выполняется через диагностическое оборудование (например, Launch, Bosch KTS) и включает этапы:
- Ввод новых параметров шин: внесение точных значений внешнего диаметра или длины окружности колеса в память ЭБУ двигателя и модуля ABS.
- Синхронизация систем: пересчет контрольных точек скорости блоком ABS для корректной передачи данных в ограничитель.
- Тестовые заезды: валидация показаний спидометра и работы ограничителя с использованием GPS-эталона.
| Тип ошибки калибровки | Последствие для ограничителя |
| Превышение реального диаметра шин | Фактическая скорость > расчетной → несрабатывание ограничения |
| Занижение реального диаметра шин | Фактическая скорость < расчетной → ложное срабатывание |
Важно! Ручная корректировка спидометра (через одометр) не влияет на работу ограничителя, так как он использует данные напрямую от датчиков вращения колес. Требуется обязательное обновление прошивки ЭБУ с внесением заводских спецификаций шин.
Юридические требования к установке на коммерческий транспорт

В Российской Федерации обязательная установка УОС регламентируется Техническим регламентом Таможенного союза ТР ТС 018/2011. Устройствами должны оснащаться грузовые автомобили полной массой свыше 3,5 тонн, автобусы с числом мест более 8 (включая водителя), а также транспорт, перевозящий опасные грузы. Максимальная скорость для таких ТС ограничена 90 км/ч на автомагистралях и 70 км/ч на других дорогах вне населённых пунктов.
В Европейском союзе требования закреплены регламентом ЕС 2019/2144. С 1 июля 2022 года все вновь производимые коммерческие транспортные средства массой свыше 3,5 тонн и пассажирские ТС вместимостью более 8 мест обязаны оборудоваться интеллектуальными УОС (Intelligent Speed Assistance). Система автоматически определяет скоростной лимит через камеры и GPS-данные, ограничивая мощность двигателя при превышении установленной скорости.
Ключевые аспекты соответствия
- Сертификация УОС по ГОСТ Р 41.89-2019 (Россия) или ECE R89 (ЕС)
- Пломбировка блока управления для предотвращения несанкционированного вмешательства
- Обязательная калибровка при монтаже и ежегодное техобслуживание
| Параметр | Россия | Евросоюз |
|---|---|---|
| Тип УОС | Электронно-механические (ограничение по оборотам) | Интеллектуальные ISA (карты + распознавание знаков) |
| Документация | Сертификат соответствия ТР ТС, отметка в диагностической карте | Свидетельство ЕС о соответствии, запись в цифровом журнале транспортного средства |
| Штрафы за отсутствие | До 50 000 руб для юрлиц (ст. 12.5 КоАП) | Запрет эксплуатации ТС, штраф до €5 000 |
Контроль исполнения требований осуществляется через технический осмотр и дорожные проверки. Водители обязаны иметь приёмопередающее устройство для УОС (тахограф), фиксирующее скоростной режим. Нарушение правил эксплуатации приравнивается к управлению ТС с неисправностями, запрещающими эксплуатацию (п.7.18 ПДД РФ).
Список источников
При подготовке материалов об истории и принципах работы устройств ограничения скорости использовались авторитетные технические и исторические публикации. Основное внимание уделялось патентной документации, инженерным исследованиям и официальным стандартам безопасности.
Ключевые источники включают архивные документы первых разработчиков, современные технические руководства производителей систем и нормативные акты, регламентирующие применение технологий. Ниже представлен перечень использованной литературы и документальных материалов.
- Патент US 3570622A (1967) - "Vehicle speed control device" (Jacob Rabinow)
- ГОСТ Р 41.89-2019 - Единообразные предписания об ограничителях скорости
- Технический отчёт "Speed Limiter Systems" (Society of Automotive Engineers, 2018)
- Монография: Иванов П.К. "Эволюция автомобильных систем безопасности" (М.: Транспорт, 2020)
- Статья: "История развития интеллектуальных ограничителей скорости" (Журнал "Автомобильная промышленность", №4, 2021)
- Техническая документация Bosch: "Electronic Speed Limiter Functional Description" (2022 Edition)
- Европейская директита 92/6/EEC - Об обязательном оснащении ТС ограничителями скорости
- Исследование: "Impact of Speed Limiters on Road Safety" (European Transport Safety Council, 2019)