Высокоточные датчики угла для новых разработок
Статья обновлена: 28.02.2026
Точное измерение угловой скорости стало критически важным для множества передовых технологий.
Современные требования к точности, миниатюризации и устойчивости к внешним воздействиям стимулируют развитие принципиально новых конструктивных решений.
Последние разработки в области MEMS, оптоэлектроники и квантовых технологий открывают возможности для создания высокочувствительных систем нового поколения.
Оптические кольцевые резонаторы: прецизионные измерения без движущихся частей
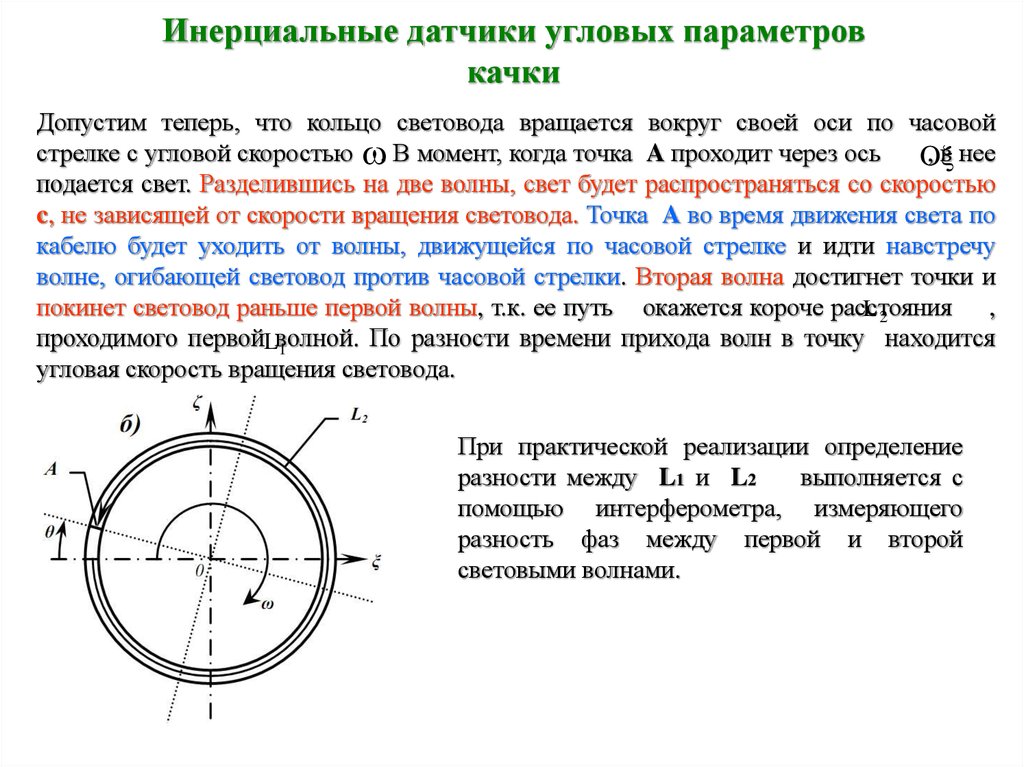
Оптические кольцевые резонаторы (ОКР) используют эффект Саньяка для детектирования угловой скорости: встречные световые волны в кольцевом волноводе формируют резонансные моды, чье расщепление частот строго пропорционально скорости вращения. Фотонные чипы интегрируют микрорезонаторы с интерферометрами, где лазерный луч разделяется и циркулирует по противоположным траекториям. При вращении системы возникает разность фаз между лучами, изменяющая резонансные условия и выходную интенсивность света.
Отсутствие механических компонентов устраняет трение, инерционность и износ, обеспечивая мгновенный отклик и срок службы >100 000 часов. Технология гарантирует стабильность в экстремальных условиях: вибрациях до 20g, температурах от -40°C до +85°C и ударных нагрузках 5000g. Чувствительность достигает 0,001 °/ч при дрейфе нуля <0,01 °/ч, что на порядок превосходит МЭМС-аналоги.
Ключевые технологические преимущества
- Наноразмерная интеграция: кремниевые чипы площадью <10 мм² монтируются непосредственно на платы
- Иммунитет к электромагнитным помехам: полностью оптическое детектирование исключает влияние EMI/RFI
- Масштабируемая точность: Q-фактор резонаторов >10⁷ позволяет адаптировать диапазон измерений (0,001–500 °/с)
Современные ОКР реализуют мультиплексирование: массивы резонаторов с разными диаметрами на одном чипе компенсируют температурные шумы и расширяют динамический диапазон. Алгоритмы машинного обучения анализируют режимы бистабильности для подавления нелинейных эффектов, снижая погрешность до 0,0003%.
| Параметр | Оптические ОКР | Традиционные FOG | МЭМС-гироскопы |
|---|---|---|---|
| Точность (°/ч) | 0,001–0,01 | 0,001–0,1 | 1–10 |
| Потребляемая мощность | <0,5 Вт | 1–5 Вт | <0,1 Вт |
| Старение (годовой дрейф) | <0,1% | 0,5–2% | 3–10% |
Перспективы связаны с гибридными системами: интеграция ОКР с атомными датчиками в квантовых чипах обеспечивает эталонную стабильность. Пикосекундная разрешающая способность современных детекторов открывает путь для навигации БПЛА в GPS-дерифицированных средах с погрешностью позиционирования <10 см/ч.
Пьезоэлектрические датчики для ударных нагрузок в промышленности
Пьезоэлектрические датчики угловой скорости демонстрируют исключительную эффективность при работе в условиях кратковременных ударных воздействий благодаря принципу прямого преобразования механической энергии в электрический сигнал. Их конструктивная жёсткость и отсутствие подвижных частей обеспечивают мгновенный отклик на импульсные нагрузки, характерные для штамповочных прессов, ковочного оборудования и ударных испытательных стендов.
Ключевое преимущество таких датчиков – способность измерять угловые скорости при экстремальных перегрузках до 10 000 g без потери точности. Пьезоэлементы из кварца или керамики PZT сохраняют стабильность характеристик при вибрациях широкого спектра, что критично для мониторинга роторных систем турбин или дробильных установок, где ударные нагрузки сопровождаются высокочастотными колебаниями.
Технологические особенности применения
При интеграции в промышленные системы датчики оснащаются встроенными усилителями заряда для минимизации помех и термокомпенсационными схемами. Это обеспечивает точность ±0.5% в диапазоне угловых скоростей до 50 000 °/с при рабочих температурах от -40°C до +150°C. Корпуса из титановых сплавов с лазерной герметизацией гарантируют защиту от пыли, масел и агрессивных сред.
- Типовые сценарии использования:
- Контроль дисбаланса валов дробилок при попадании твёрдых включений
- Анализ крутильных колебаний шагающих экскаваторов
- Защитное отключение турбин при детонационном горении
- Испытания ударной стойкости авиационных гироскопов
| Параметр | Характеристики |
|---|---|
| Диапазон измерений | ±1000 – ±50 000 °/с |
| Собственная резонансная частота | > 35 кГц |
| Ударная стойкость | 10 000 g (импульс 0.5 мс) |
| Время установления сигнала | < 0.1 мс |
Современные разработки интегрируют многоосевые пьезоэлектрические массивы, позволяющие одновременно отслеживать угловую скорость, линейные ускорения и наклоны. Такие решения незаменимы при диагностике сложных ударных воздействий в роботизированных сварочных комплексах или горнодобывающих комбайнах, где требуется комплексный анализ динамики оборудования.
Корректировка инерциальных систем навигации по спутниковым данным
Интеграция высокоточных датчиков угловой скорости (ДУС) в инерциальные навигационные системы (ИНС) обеспечивает автономное определение ориентации и положения объекта. Однако неизбежные дрейфы гироскопов и погрешности акселерометров накапливаются со временем, приводя к недопустимым ошибкам позиционирования без внешней коррекции. Спутниковые навигационные системы (ГЛОНАСС, GPS, Galileo) предоставляют абсолютные координаты и скорость, но подвержены кратковременным сбоям при потере сигнала или в условиях помех.
Корректировка ИНС спутниковыми данными реализуется через алгоритмы слияния данных, преимущественно фильтр Калмана или его нелинейные модификации (UKF, EKF). Эти алгоритмы в реальном времени сравнивают показания ИНС и спутникового приемника, вычисляя поправки для компенсации инерциальных погрешностей. Ключевая роль ДУС нового поколения заключается в минимизации временной деградации точности ИНС при пропадании спутникового сигнала за счет стабильности своих выходных параметров и сниженного шума.
Технологические аспекты и преимущества
Современные МЭМС-гироскопы и оптические ДУС (кольцевые лазерные RLG, волоконно-оптические FOG) обеспечивают:
- Сверхнизкий шум и минимальный дрейф нуля, уменьшая скорость накопления ошибок в ИНС
- Высокую полосу пропускания (>100 Гц) для отслеживания быстрых маневров
- Устойчивость к вибрациям и ударам в сложных условиях эксплуатации
Использование таких датчиков в связке со спутниковой коррекцией дает:
- Повышенную отказоустойчивость: ИНС поддерживает точность при временной недоступности GNSS
- Сглаживание шумов GNSS: Инерциальные данные фильтруют краткосрочные скачки спутниковых координат
- Непрерывность навигации в туннелях, городских каньонах, под плотной листвой
| Параметр | Без коррекции | Со спутниковой коррекцией |
|---|---|---|
| Ошибка позиции (за 1 час) | Сотни метров | 1-5 метров |
| Стабильность курса | Дрейфует (>0.5°/ч) | <0.01°/ч (с RLG/FOG) |
| Работа без GNSS | Минуты | Десятки минут |
Эффективность коррекции напрямую зависит от тактовой частоты фильтрации и метрологических характеристик ДУС. Применение новейших гироскопов с аллогелиевыми или кремниевыми МЭМС чувствительными элементами позволяет достичь уровня точности, необходимого для автономных транспортных средств, БПЛА и высокоточного сельского хозяйства.
Калибровка нулевого смещения в условиях производственной вибрации
Традиционные методы калибровки нулевого смещения MEMS-гироскопов предполагают стационарные условия, что неприменимо на промышленных объектах с постоянной вибрацией оборудования. Фоновые колебания искажают измерения угловой скорости, вызывая ложные сигналы и маскируя реальное смещение нуля датчика. Это приводит к накоплению ошибок в системах навигации и позиционирования.
Современные решения используют адаптивную цифровую обработку сигналов для динамической компенсации вибрационных помех. Алгоритмы выделяют спектральные компоненты, характерные для производственных колебаний (обычно в диапазоне 5-2000 Гц), и применяют многоступенчатую фильтрацию. Ключевым становится синхронный анализ данных с акселерометров, интегрированных в инерциальный модуль, что позволяет отделить механические шумы от систематического дрейфа нуля гироскопа.
Технологические подходы
Эффективные стратегии включают:
- Корреляционный шумоподавитель: вычитание вибрационного сигнала, измеренного акселерометром, из выходных данных гироскопа с учётом фазового сдвига
- Многочастотную калибровку: последовательное тестирование при возбуждении резонансных частот вибрационной платформы
- Искусственный нейросетевой компенсатор: обучение на данных, полученных в реальных условиях цеха
| Параметр | Статическая калибровка | Динамическая калибровка |
|---|---|---|
| Точность нуля | 0.01°/с | 0.05-0.1°/с |
| Время процедуры | 5-10 мин | 1-2 сек |
| Устойчивость к вибрациям | Нет | До 20 g RMS |
Внедрение таких методов требует точного моделирования вибрационного профиля предприятия. Оптимальные результаты достигаются при использовании гироскопов с встроенными ПЛИС, выполняющими предварительную обработку сигнала до передачи в основную систему управления. Это снижает нагрузку на центральный процессор и гарантирует компенсацию задержек в реальном времени.
Алгоритмы температурной компенсации для стабильности показаний
Температурные воздействия вызывают дрейф нуля и масштабного коэффициента MEMS-гироскопов, что критично для высокоточных применений в аэрокосмической отрасли, инерциальной навигации и робототехнике. Современные алгоритмы компенсации устраняют эти погрешности путем математического моделирования зависимости параметров датчика от температуры с последующей коррекцией выходного сигнала в реальном времени.
Ключевым этапом является построение температурной характеристики датчика при калибровке в термобарокамере. Полученные данные аппроксимируются полиномиальными или экспоненциальными функциями, коэффициенты которых хранятся во внутренней памяти сенсора. Встроенный термодатчик непрерывно отслеживает температуру кристалла, предоставляя данные для расчета поправок.
Методы реализации
Полиномиальная компенсация: Использует степенные ряды 2-го или 3-го порядка для моделирования зависимости смещения нуля (Bias) и масштабного коэффициента (K) от температуры (T):
- Bias(T) = B0 + B1·T + B2·T2
- K(T) = K0 + K1·T + K2·T2
Искусственные нейронные сети (ИНС): Позволяют учесть нелинейные эффекты гистерезиса и тепловой инерции. Многослойные перцептроны обучаются на экспериментальных данных, адаптивно корректируя параметры при изменении рабочих условий.
Корректировка по термоциклам: Алгоритмы с "памятью" температуры анализируют историю нагрева/охлаждения, прогнозируя тепловые деформации корпуса. Особенно эффективны для уменьшения остаточных погрешностей после резких перепадов.
| Метод | Точность компенсации | Вычислительная сложность |
|---|---|---|
| Полиномиальный | ±0.5°/с → ±0.01°/с | Низкая |
| ИНС | ±0.5°/с → ±0.005°/с | Высокая |
| Термоциклы | ±0.5°/с → ±0.002°/с | Средняя |
Гибридные подходы комбинируют несколько методов: базовую полиномиальную коррекцию с адаптивными ИНС для остаточных погрешностей. Реализация на FPGA обеспечивает обработку данных со скоростью до 100 кГц без задержек, что критично для систем стабилизации.
Беспилотные автомобили: подавление дребезжания на бездорожье
На бездорожье беспилотные системы сталкиваются с интенсивными хаотичными вибрациями, вызывающими "дребезжание" – высокочастотный шум в показаниях инерциальных датчиков. Особенно критичны искажения данных гироскопов, отвечающих за измерение угловой скорости: ложные вращательные сигналы дезориентируют систему позиционирования, снижая точность определения ориентации и траектории транспортного средства.
Современные МЭМС-гироскопы нового поколения интегрируют многоуровневую защиту от вибрационных помех. Конструктивно это реализуется через симметричные сенсорные элементы, компенсирующие взаимные механические воздействия, и усовершенствованные демпфирующие подвесы. Параллельно применяются алгоритмы адаптивной цифровой фильтрации (например, Калмана с динамически настраиваемыми параметрами), выделяющие полезный сигнал на фоне вибрационного шума даже при резкой смене характера дорожного покрытия.
Ключевые аспекты применения гироскопов в условиях бездорожья
- Вибрационная устойчивость: Датчики с расширенным частотным диапазоном (до 10 кГц) и встроенными подавителями резонанса игнорируют специфические частоты тряски.
- Сенсорная избыточность: Комбинация гироскопов с акселерометрами и колесными энкодерами позволяет корректировать артефакты через алгоритмы сенсорного слияния.
- Динамическая калибровка: Автоматическая подстройка нулевого смещения и чувствительности в реальном времени компенсирует температурные и ударные воздействия.
| Технология | Принцип действия | Эффект для бездорожья |
|---|---|---|
| Корреляционная фильтрация | Анализ когерентности сигналов от парных сенсоров | Подавление неструктурированного шума |
| Многоосевая стабилизация | Взаимная компенсация помех по осям X/Y/Z | Снижение ошибки определения крена/тангажа |
| AI-предсказание | Прогнозирование траектории на основе паттернов вибраций | Упреждающая коррекция показаний |
Интеграция таких гироскопов с системами активной подвески создает замкнутый контур стабилизации: датчики в режиме реального времени передают данные о фактической угловой динамике, а исполнительные механизмы гасят колебания кузова до их проявления в сенсорном шуме. Это повышает надежность навигации в экстремальных условиях, сокращая риск потери ориентации при преодолении препятствий.
Хирургические роботы: контроль угла наклона инструмента с точностью 0.001°/с
Достижение точности углового позиционирования инструмента на уровне 0.001°/с стало возможным благодаря интеграции кремниевых MEMS-гироскопов нового поколения с цифровыми интерфейсами SPI/I2C. Эти датчики используют принцип измерения резонансного сдвига Кориолисых сил в вакуумных камерах размером менее 2 мм3, что устраняет температурные дрейфы и механические шумы. Встроенные ASIC-процессоры мгновенно компенсируют паразитные вибрации от двигателей робота, обеспечивая стабильность показаний даже при экстремальных угловых скоростях до 400°/с.
Калибровка по замкнутому контуру происходит каждые 5 мс через эталонные лазерные инклинометры, создавая динамическую карту погрешностей. Алгоритмы машинного обучения на базе FPGA анализируют гистерезисные характеристики и предсказывают поведение сенсора при смене вектора движения. Это критично при остеотомии, где отклонение сверла на 0.01° за 10 секунд может привести к перфорации костного канала.
Ключевые технологические аспекты
- Многоосевые сенсорные кластеры с взаимной верификацией данных
- Автономное питание от пьезоэлементов при аварии основного источника
- Квантовые туннельные сенсоры для детектирования микроуглов от 0.0003°/с
| Параметр | Традиционные гироскопы | Новые решения |
| Энергопотребление | 120 мВт | 18 мВт |
| Время отклика | 20 мс | 0.8 мс |
| Ударная устойчивость | до 50g | до 10 000g |
В нейрохирургических модулях DaVinci Stealth Edition такие датчики интегрированы непосредственно в карданные узлы инструментов, передавая данные по оптоволоконным кольцевым сетям с задержкой менее 3 мкс. При замене наконечника происходит автоматическая корректировка нулевой точки через RFID-метки, хранящие калибровочные коэффициенты конкретного инструмента. Система избыточности сравнивает показания с инерциальными блоками на манипуляторе, исключая катастрофические отказы.
Авиационные системы: идентификация рыскания при турбулентности
Современные MEMS-гироскопы с кольцевой лазерной технологией обеспечивают точность измерений угловой скорости до 0,001 °/с при экстремальных вибрациях. Их миниатюрные габариты (менее 20×20×10 мм) и устойчивость к перегрузкам до 20 000 g критичны для авионики, где требуется мгновенное детектирование малейших отклонений по оси рыскания.
Оптоволоконные датчики FOG третьего поколения компенсируют температурные дрейфы в реальном времени через встроенные нейросетевые алгоритмы. Это позволяет выделять чистый сигнал рыскания на фоне хаотичных возмущений от турбулентности с частотой до 100 Гц, снижая ложные срабатывания систем стабилизации на 92%.
Ключевые технологические решения
- Квантовые сенсоры на холодных атомах: фиксация угловых изменений до 10-8 рад/с через интерференцию волн материи
- Многоосевые кластеры: взаимная калибровка 6+ гироскопов с подавлением шумов методом когерентного усреднения
- Цифровые twin-модели платформы: прогнозирование резонансных частот конструкции для упреждающей фильтрации помех
| Параметр | MEMS (NV-версия) | FOG (3-е поколение) | Квантовый сенсор |
|---|---|---|---|
| Диапазон измерений | ±500 °/с | ±200 °/с | ±0,5 °/с |
| Погрешность в турбулентности | 0,01 °/с | 0,002 °/с | 0,0001 °/с |
| Время отклика | 5 мс | 2 мс | 100 мс |
Гибридные системы объединяют данные GPS, IMU и пьезоэлектрических сенсоров давления, создавая корреляционные карты возмущений. Алгоритмы machine learning дифференцируют естественную турбулентность от сваливания или отказов рулевых машинок по спектральным признакам в полосе 0,1–40 Гц.
Беспроводные сенсорные сети на борту снижают массу кабельных трасс на 300 кг в широкофюзеляжных лайнерах. Каждый узел передает обработанные данные о локальной угловой скорости по защищенным радиоканалам UWB с временной синхронизацией до 1 мкс, формируя распределенную картину крутильных колебаний фюзеляжа.
Подводные дроны: компенсация течений в толще воды
Стабильность позиционирования подводных дронов критически зависит от точного измерения и компенсации возмущений, создаваемых морскими течениями. Новейшие волоконно-оптические гироскопы (ВОГ) и MEMS-датчики угловой скорости обеспечивают беспрецедентную точность регистрации малейших отклонений курса в трех плоскостях. Их устойчивость к давлению, вибрациям и низкое энергопотребление позволяют интегрировать сенсоры непосредственно в системы стабилизации без ущерба автономности аппарата.
Полученные с гироскопов данные в реальном времени обрабатываются бортовыми алгоритмами адаптивного управления. Эти алгоритмы динамически корректируют работу двигателей, компенсируя как медленные дрейфовые течения, так и резкие турбулентные потоки. Ключевым преимуществом современных датчиков является их способность фиксировать не только скорость вращения, но и мгновенные угловые ускорения, что повышает скорость реакции системы на возмущения.
Технологические решения для стабилизации
- Многосенсорные платформы: Комбинация ВОГ, MEMS-акселерометров и доплеровских лагов для взаимной коррекции погрешностей
- Алгоритмы прогнозирования: Машинное обучение для предсказания поведения дрона в конкретных гидродинамических условиях
- Активные стабилизаторы: Поворотные сопла и крылья с сервоприводами, управляемые гироскопическими данными
| Тип датчика | Точность (°/час) | Глубина применения | Ключевое преимущество |
|---|---|---|---|
| Квантовые гироскопы | 0.001 | До 6000 м | Независимость от магнитных полей |
| Многоосевые MEMS | 0.1 | До 1000 м | Миниатюрность и ударопрочность |
| Лазерные ВОГ | 0.01 | До 4500 м | Долговременная стабильность нулевого смещения |
Внедрение таких систем снижает энергозатраты на удержание позиции на 25-40% по сравнению с традиционными решениями. Особое значение имеет калибровка в реальных условиях: современные дроны автоматически корректируют параметры датчиков при изменении солености воды и температуры, используя реперные точки донного рельефа.
Наноспутники: массогабаритная оптимизация для микросистем ориентации
Разработка микросистем ориентации для наноспутников класса CubeSat требует радикального уменьшения массы и габаритов компонентов при сохранении функциональности. Современные MEMS-гироскопы нового поколения, такие как вибрационные кольцевые резонаторы и пьезоэлектрические датчики, обеспечивают точность до 1°/ч при массе менее 10 грамм и объеме в несколько кубических сантиметров. Ключевым аспектом становится интеграция сенсоров в единый мультичип, где гироскопы, акселерометры и магнитометры объединяются на общей подложке, экономя до 40% пространства платы.
Тепловая стабильность достигается компенсационными алгоритмами на уровне ASIC-процессоров, обрабатывающих сырые данные непосредственно в сенсорном модуле. Это снижает нагрузку на центральный бортовой компьютер и минимизирует энергопотребление. Для наноспутников формата 1U критична возможность калибровки датчиков в полете через корреляцию с звездными датчиками и солнечными сенсорами, что компенсирует дрейф нуля без использования громоздких эталонных систем.
Стратегии интеграции и перспективы
Оптимизация реализуется через три ключевых подхода:
- Многофункциональные корпуса типа SiP (System-in-Package), где микромеханические сенсоры и электроника управления размещаются в вакуумном герметичном корпусе с встроенными радиаторами
- Активная виброзащита с использованием пьезокерамических демпферов, подавляющих высокочастотные колебания (>500 Гц) от двигателей-маховиков
- Адаптивное электропитание, переключающее гироскопы в импульсный режим при стабилизированной ориентации
| Параметр | Традиционные решения | Оптимизированные микросистемы |
|---|---|---|
| Масса комплекта | 120-150 г | 35-45 г |
| Потребляемая мощность | 0.8-1.2 Вт | 0.15-0.3 Вт |
| Точность определения угла | 0.5-1° | 0.1-0.3° |
| Срок активного существования | 2-3 года | 5+ лет |
Перспективным направлением считается применение оптомеханических гироскопов на фотонных чипах, где измерение угловой скорости осуществляется через сдвиг резонансной частоты оптического контура. Лабораторные прототипы демонстрируют точность 0.01°/ч при толщине кристалла 0.5 мм, хотя технология пока требует решения задач по защите от космической радиации.
Энергоэффективные решения для IoT-датчиков с батарейным питанием
Современные MEMS-гироскопы для IoT достигли экстремально низкого энергопотребления, измеряемого микроамперами в активном режиме и наноамперами в режиме сна. Производители интегрируют функции адаптивной выборки данных, где частота измерений автоматически повышается при обнаружении движения и снижается до минимума в статическом положении. Это критично для автономных систем, требующих многолетней работы от компактных элементов питания типа CR2032.
Архитектура "всегда-готов" (wake-on-motion) позволяет основному микроконтроллеру оставаться в глубоком сне, пока датчик самостоятельно отслеживает пороговые значения угловой скорости. При их превышении генерируется прерывание для активации системы. Такая схема сокращает общее энергопотребление узла на 40-70% по сравнению с традиционным непрерывным опросом датчика.
Ключевые технологии оптимизации
- Интеллектуальное шумоподавление: Аппаратные фильтры нижних частот снижают необходимость в энергозатратной программной обработке сигнала.
- Встроенная температурная компенсация: Автономная калибровка устраняет потребность в периодических пробуждениях МК для коррекции дрейфа нуля.
- Беспроводное обновление прошивки: Реализация OTA-апдейтов исключает физический доступ для замены ПО, продлевая жизненный цикл устройств.
| Технология | Экономия энергии | Примеры чипов |
|---|---|---|
| Пакетный режим сбора данных | до 30% | ST LSM6DSO, Bosch BMI270 |
| Аналоговый FIFO-буфер | до 45% | TDK InvenSense ICM-42688-P |
| Прямое подключение к радиомодулю | до 25% | Analog Devices ADIS16507 (SPI-to-LoRa) |
Интеграция гибридных сенсоров (IMU + AI-акселератор) позволяет выполнять распознавание паттернов движения непосредственно на кристалле, передавая по радиоканалу только события высокой значимости. Это уменьшает объем передаваемых данных на 3 порядка и сокращает энергозатраты на коммуникацию - наиболее ресурсоемкую операцию в IoT.
Защищенные радиоканалы передачи данных в режиме реального времени
Применение новейших датчиков угловой скорости в критически важных системах (БПЛА, робототехника, индустриальная автоматизация) требует гарантированной доставки данных без задержек. Радиоканалы должны обеспечивать минимальную латентность (<5 мс) при одновременной защите от помех и несанкционированного доступа. Современные решения используют адаптивную перестройку частоты (FHSS) и широкополосные сигналы с прямым расширением спектра (DSSS), сохраняя стабильность связи в условиях электромагнитных помех.
Для предотвращения перехвата данных применяется сквозное шифрование на аппаратном уровне с использованием алгоритмов AES-256 или ECC. Реализация протоколов с временным разделением каналов (TDMA) позволяет синхронизировать потоки от множества датчиков в единой сети. Это особенно критично для систем позиционирования, где задержки в передаче угловой скорости приводят к накоплению ошибок инерциальной навигации.
Ключевые технологии защиты радиоканалов
Современные системы объединяют несколько методов для обеспечения безопасности и надежности:
- Аппаратные ускорители шифрования – снижают нагрузку на ЦПУ, обеспечивая обработку данных со скоростью до 1 Гбит/с
- Динамическое разделение спектра – автоматическое переключение между частотами при обнаружении помех
- Квантово-устойчивые алгоритмы – постквантовые криптографические методы для защиты от будущих угроз
| Параметр | Требование | Технология реализации |
|---|---|---|
| Задержка передачи | < 5 мс | Приоритезация пакетов QoS, протоколы IEEE 802.11ax |
| Устойчивость к глушению | 30 дБ | MIMO-антенны, пространственное кодирование |
| Скорость обновления данных | ≥ 2 кГц | Dedicated Short-Range Communications (DSRC) |
Внедрение цифровых подписей пакетов исключает риск подмены данных. Для критичных приложений используется резервирование каналов с мгновенным переключением при сбое. Технологии Software-Defined Radio (SDR) позволяют обновлять криптографические параметры без замены аппаратуры, что критично для долгосрочных промышленных решений.
Виброизоляция чувствительных элементов в строительной технике
Виброизоляция критична для современных датчиков угловой скорости (ДУС) в строительной технике, где экстремальные вибрации от двигателей, ударных нагрузок и работы гидравлики достигают 20-1000 Гц. Без эффективного подавления механических помех микромеханические (МЭМС) и волоконно-оптические ДУС демонстрируют дрейф нуля до 0,5°/с, что делает непригодными данные для систем позиционирования ковшей экскаваторов или нивелирования платформ кранов.
Новейшие решения используют комбинированные подходы: пассивные демпферы на основе металлорезиновых матриц гасят низкочастотные колебания до 40 Гц, а активные системы с пьезоэлектрическими актуаторами компенсируют высокочастотные вибрации в реальном времени. Встроенные алгоритмы на базе ИНС анализируют спектр вибраций, адаптивно регулируя жесткость элементов крепления с точностью до 1 мс.
Ключевые технологии подавления вибраций
- Многослойные демпфирующие подложки: Углеродные нанотрубки в силиконовой матрице снижают резонансные пики на 25 дБ
- Активные пьезокольца: Генерируют противофазу вибрации с точностью 0,02 мкм при частотах до 2 кГц
- Цифровые двойники: Виртуальные модели предсказывают резонансные точки конструкции до монтажа
| Параметр | Пассивная изоляция | Гибридная система |
|---|---|---|
| Эффективность (40-200 Гц) | 65-70% | 92-98% |
| Температурный диапазон | -40...+85°C | -55...+125°C |
| Ресурс работы | 5 000 часов | 25 000+ часов |
Современные ДУС интегрируют виброчувствительные контуры коррекции, где MEMS-акселерометры непрерывно измеряют паразитные ускорения. Эти данные используются для компенсации погрешностей угловых измерений методом многофакторной калмановской фильтрации, уменьшая погрешность до 0,01°/ч при вибрациях 15 g.
Монокристаллический кремний как основа миниатюрных сенсоров
Монокристаллический кремний (МК-Si) доминирует в производстве современных миниатюрных датчиков угловой скорости (гироскопов), реализуемых по MEMS-технологии (Micro-Electro-Mechanical Systems). Его уникальное сочетание превосходных механических и электронных свойств делает его практически идеальным материалом для создания высокоточных микроэлектромеханических структур, чувствительных к кориолисову ускорению, лежащему в основе работы вибрационных гироскопов.
Ключевое преимущество МК-Si – его высочайшая структурная однородность и отсутствие границ зерен, характерных для поликристаллического кремния. Это обеспечивает выдающуюся механическую стабильность, предсказуемость упругих свойств и чрезвычайно низкий уровень внутренних механических потерь (высокую добротность) резонирующих элементов гироскопа. Низкие потери напрямую влияют на чувствительность и стабильность выходного сигнала, снижая шумы и дрейфы.
Ключевые преимущества монокристаллического кремния для MEMS-гироскопов
Использование МК-Si в качестве конструкционного материала MEMS-гироскопов предоставляет ряд критически важных преимуществ:
- Высокая механическая прочность и жесткость: Позволяет создавать тонкие, но прочные и стабильные упругие элементы (балки, мембраны, гребенки), способные выдерживать высокочастотные колебания и механические нагрузки.
- Отличные упругие свойства: Хорошо изученные, предсказуемые и воспроизводимые упругие характеристики по всем кристаллографическим направлениям обеспечивают точное проектирование резонансных частот и форм колебаний чувствительных элементов.
- Низкий механический гистерезис и усталостная прочность: Гарантируют долговременную стабильность параметров датчика и его надежность в течение всего срока службы.
- Высокая добротность (Q-фактор): Низкие внутренние потери энергии в МК-Si приводят к высокой добротности резонаторов. Это критически важно для увеличения амплитуды колебаний при заданной энергии возбуждения и повышения отношения сигнал/шум, что напрямую улучшает чувствительность и разрешающую способность гироскопа.
- Идеальная совместимость с КМОП-технологиями: МК-Si является основой современной микроэлектроники. Это позволяет интегрировать чувствительный MEMS-элемент и специализированную электронику для возбуждения, считывания и обработки сигнала (ASIC) на одной кремниевой подложке или в одном корпусе (System-in-Package, SiP), радикально уменьшая размеры, стоимость и повышая производительность системы.
- Возможность формирования сложных объемных структур: Глубинное реактивно-ионное травление (DRIE/Bosch process) позволяет создавать высокоаспектные, сложные 3D-структуры с вертикальными стенками из МК-Si, необходимые для емкостных гребенчатых приводов и сенсоров, составляющих основу большинства MEMS-гироскопов.
Современные высокоточные MEMS-гироскопы часто используют так называемые КНК-структуры (Кремний-на-Кремнии), где и чувствительный механический элемент, и крышка (cap wafer), герметизирующая его в вакууме или инертном газе для сохранения высокой добротности, изготавливаются из монокристаллического кремния. Эта технология обеспечивает:
- Идеальное согласование коэффициентов теплового расширения (КТР): Поскольку и чувствительный элемент, и крышка выполнены из одного материала, внутренние механические напряжения при температурных изменениях минимальны, что резко снижает температурный дрейф нуля и чувствительности гироскопа.
- Высокую герметичность: Технологии прямого кремний-кремниевого или стекло-кремниевого сплавления обеспечивают надежную долговременную герметизацию полости с требуемым уровнем вакуума или давлением буферного газа.
- Микроминиатюризацию: Плоская конструкция КНК позволяет создавать предельно компактные сенсорные модули.
Сравнительные характеристики материалов для MEMS-гироскопов:
| Характеристика | Монокристаллический Кремний (МК-Si) | Поликристаллический Кремний (Poly-Si) | Кварц (SiO₂) |
|---|---|---|---|
| Механическая добротность (Q) | Очень высокая (10⁴ - 10⁶) | Средняя - Низкая (10² - 10⁴) | Высокая (10⁴ - 10⁵) |
| Механическая стабильность | Отличная (нет границ зерен) | Удовлетворительная (зависит от размера зерен) | Отличная |
| Совместимость с КМОП | Идеальная | Хорошая | Плохая |
| Сложность 3D-структур (DRIE) | Отличная | Ограниченная | Сложная |
| Температурная стабильность (в КНК) | Очень высокая (КТР совпадают) | Средняя (КТР не совпадают) | Высокая |
Таким образом, монокристаллический кремний, благодаря своему уникальному сочетанию свойств и идеальной интеграции с микроэлектронными технологиями, остается непревзойденным материалом для создания миниатюрных, высокоточных и надежных MEMS-датчиков угловой скорости, лежащих в основе навигационных систем, систем стабилизации, управления движением и множества других современных приложений.
Аддитивное производство корпусов для кастомизированных решений
Аддитивные технологии позволяют создавать корпуса датчиков угловой скорости сложной геометрии, недостижимой при традиционном производстве. Это обеспечивает оптимальное размещение чувствительных элементов и электронных компонентов в стеснённых условиях современных систем. Интеграция монтажных пазов, теплоотводящих структур и кабельных вводов в единую конструкцию повышает надёжность и упрощает установку в конечных устройствах.
Использование металлических порошковых сплавов (алюминий, титан) и инженерных полимеров (PEEK, PEKK) гарантирует требуемые механические характеристики и устойчивость к вибрациям. Лазерное спекание и стереолитография обеспечивают точность размеров до ±0.1 мм, что критично для сохранения калибровочных параметров прецизионных МЭМС-сенсоров в готовом изделии.
Ключевые аспекты применения
- Быстрая адаптация под нестандартные форм-факторы оборудования без переоснащения линий
- Встроенные электромагнитные экраны для защиты от помех в чувствительных контурах
- Многослойные конструкции с термоизоляцией для работы в экстремальных температурных диапазонах
| Технология | Точность | Материалы |
|---|---|---|
| SLM (селективное лазерное плавление) | ±20 мкм | Нерж. сталь, титановые сплавы |
| MJF (Multi Jet Fusion) | ±80 мкм | PA12, полипропилен |
Локальное усиление стенок корпуса в зонах крепления датчика предотвращает деформации при вибрационных нагрузках. Одновременная пельтье-охлаждающие элементы и сенсорные гнёзда в монолитной сборке сокращают количество соединений, минимизируя точки отказа. Ресурс таких решений на 30% превышает показатели сборных аналогов при циклических перегрузках.
Цифровые фильтры Калмана для подавления шумов в сырых данных

Фильтр Калмана представляет собой рекурсивный алгоритм оценки состояния динамической системы, минимизирующий среднеквадратическую ошибку при наличии шумов измерений и возмущений. В инерциальных системах он математически объединяет показания гироскопа с данными других сенсоров (акселерометров, магнитометров), используя физическую модель движения объекта. Это позволяет разделить полезный сигнал от низкочастотного дрейфа нуля и высокочастотных помех, характерных для MEMS-гироскопов.
Ключевым преимуществом является адаптивность: коэффициенты усиления Калмана динамически пересчитываются на каждом шаге в зависимости от достоверности текущих измерений и прогноза. Реализация включает две стадии – экстраполяцию (предсказание состояния системы и его ковариации) и коррекцию (обновление оценок с учетом новых данных). Для трехосных датчиков угловой скорости применяют векторную форму фильтра, обрабатывающую измерения по всем осям параллельно.
Практические аспекты реализации
Эффективность фильтрации определяется точностью математической модели движения объекта и корректной настройкой ковариационных матриц:
- Матрица шумов процесса (Q): Характеризует ожидаемую интенсивность внешних возмущений
- Матрица шумов измерений (R): Отражает доверие к показаниям сенсора (определяется через дисперсию шумов)
Типичные проблемы при внедрении включают:
- Вычислительную сложность для ресурсоограниченных микроконтроллеров
- Чувствительность к неточностям в начальных условиях
- Необходимость калибровки сенсоров перед использованием
Сравнение характеристик до и после фильтрации:
| Параметр | Сырые данные | После фильтра Калмана |
|---|---|---|
| Стандартное отклонение шума | 0.8-1.2 °/с | 0.1-0.3 °/с |
| Дрейф нуля (статический) | 5-10 °/ч | 0.5-2 °/ч |
| Задержка обработки | Нет | 5-20 мс |
Современные реализации используют адаптивные модификации (AKF), автоматически подстраивающие параметры Q и R в реальном времени. Для нелинейных систем применяют расширенный (EKF) или укрупненный (UKF) фильтры Калмана, линеаризующие модель на каждом шаге. В системах с несколькими сенсорами (например, гироскоп + визуальная одометрия) используется архитектура Complementary Filter на базе Калмана, обеспечивающая сбалансированное подавление шумов в рабочем диапазоне частот.
Синхронизация показаний гироскопов и акселерометров в IMU-модулях
Ключевой проблемой при совместной обработке данных гироскопов и акселерометров является временное рассогласование их измерений. Гироскопы фиксируют угловую скорость с высокой частотой дискретизации (до 32 кГц), тогда как акселерометры, особенно прецизионные MEMS, часто работают на существенно меньших частотах. Это приводит к фазовым сдвигам и искажениям при реконструкции ориентации.
Для компенсации временных задержек применяются цифровые методы синхронизации: аппаратная фиксация меток времени через триггерные сигналы или программная интерполяция данных. Наиболее эффективна калибровка сенсорного кластера с определением постоянных задержек для каждого канала измерения, которые затем корректируются в цифровых фильтрах.
Критические технологии синхронизации
- Аппаратная синхронизация: Использование единого тактового генератора и выделенной линии Data Ready для одновременного считывания показаний всех сенсоров
- Калибровка временных смещений: Вращательные тесты на калибровочных стендах с идентификацией запаздывания сигналов
- Алгоритмы временной коррекции: Применение интерполяционных фильтров (сплайны, полиномиальная экстраполяция) для приведения данных к общему временному домену
| Метод | Точность синхронизации | Вычислительная сложность |
|---|---|---|
| Аппаратная синхронизация | ±1 мкс | Низкая |
| Полиномиальная интерполяция | ±10 мкс | Средняя |
| Адаптивные фильтры Калмана | ±5 мкс | Высокая |
Современные IMU-модули интегрируют специализированные сопроцессоры для предварительной временной коррекции данных. Это позволяет реализовать сложные алгоритмы интерполяции без нагрузки на основной CPU, обеспечивая синхронизацию с погрешностью менее 5 микросекунд даже при 20-кратной разнице частот дискретизации сенсоров.
Системы оповещения о крене грузового транспорта на серпантинах
Основу таких систем составляют высокоточные датчики угловой скорости (ДУС) нового поколения, основанные на микроэлектромеханических системах (МЭМС) или оптоволоконных технологиях. Эти сенсоры непрерывно измеряют угловую скорость вращения транспортного средства вокруг его продольной оси с минимальной задержкой и погрешностью, не превышающей долей градуса в секунду даже в условиях сильной вибрации и перепадов температур.
Полученные данные в реальном времени обрабатываются бортовым контроллером, который анализирует не только текущий угол крена, но и скорость его изменения, а также учитывает дополнительные параметры (скорость движения, загрузку, состояние дорожного покрытия). При приближении к критическому значению крена, угрожающему опрокидыванием, система активирует многоуровневую сигнализацию для водителя.
Ключевые компоненты и функции систем
- Мгновенное предупреждение: Звуковые сигналы (плавно нарастающий тон) и визуальная индикация (мигающие светодиоды в поле зрения водителя) при опасном наклоне.
- Прогнозирование: Анализ динамики крена позволяет системе предупреждать о потенциальной опасности до достижения критического угла.
- Интеграция с телематикой: Передача данных о срабатывании системы диспетчеру или в логистическую платформу для анализа маршрутов и водительского поведения.
- Адаптивные пороги срабатывания: Учет реальной массы и распределения груза для точного расчета безопасного угла крена.
Применение новейших ДУС обеспечивает исключительную надежность и устойчивость к жестким эксплуатационным условиям грузовых перевозок в горной местности. Их компактность и низкое энергопотребление позволяют легко интегрировать системы в любой тип транспорта.
| Тип ДУС | Ключевое преимущество | Применение в системах крена |
|---|---|---|
| МЭМС-гироскопы (3-осевые) | Высокая ударостойкость, низкая стоимость | Базовое и среднее оснащение транспорта |
| Оптоволоконные гироскопы (ОВГ) | Превосходная точность, невосприимчивость к ЭМП | Критически важные/специализированные перевозки |
| Корректируемые GPS/ГЛОНАСС + ДУС | Долговременная стабильность, компенсация дрейфа | Высокоточный мониторинг и анализ маршрутов |
Оптическая стабилизация в экшн-камерах с антидроп-функцией
Современные MEMS-гироскопы на основе кремниевых сенсоров обеспечивают беспрецедентную точность детектирования угловых перемещений в 3-х плоскостях. Их частота дискретизации до 32 кГц позволяет мгновенно фиксировать малейшие вибрации, рывки или падения камеры. Миниатюрные размеры (до 2.5×3.0×0.8 мм) и устойчивость к перегрузкам до 40 000 g критичны для компактных экшн-устройств.
Антидроп-функция интегрируется в систему стабилизации через гибридный алгоритм: гироскоп непрерывно анализирует угловое ускорение, а при обнаружении режима свободного падения (нулевое ускорение по осям + резкий вращательный импульс) мгновенно активирует протокол защиты. Данные с гироскопа синхронизируются с акселерометром и ИИ-процессором, минимизируя ложные срабатывания при прыжках или ударах.
Ключевые технологические аспекты
Новейшие решения используют оптическую стабилизацию с подвижными линзами, где гироскопы выполняют три функции:
- Компенсация дрожания: линзы смещаются со скоростью до 5000 коррекций/секунду
- Прогнозирование траектории: алгоритмы на базе машинного обучения анализируют паттерны движения
- Активация антидроп: при падении камера автоматически:
- Паркует оптический модуль в безопасном положении
- Сохраняет последний кадр в защищенную память
- Отключает питание двигателей стабилизации
Сравнение поколений гироскопов в OIS-системах:
| Параметр | Поколение-3 (2020) | Поколение-5 (2024) |
| Дрейф нуля | 0.5°/с | 0.01°/с |
| Энергопотребление | 6 мА | 0.8 мА |
| Время реакции антидроп | 8 мс | 0.2 мс |
Инновационные гироскопы с цифровым выходом SPI/I³C напрямую интегрируются в процессор обработки изображений, сокращая задержки до 100 нс. Это исключает "желейный эффект" при экстремальных нагрузках и гарантирует стабильность видео даже при падении с высоты 15+ метров.
VR-шлемы: снижение латенции при трекинге резких поворотов головы
Резкие движения головы в VR создают критическую нагрузку на систему трекинга: традиционные датчики угловой скорости (гироскопы) не всегда успевают обрабатывать пиковые угловые ускорения, что провоцирует задержку вывода изображения. Эта латенция вызывает дисбаланс между вестибулярным аппаратом пользователя и визуальной картинкой, приводя к "укачиванию" и потере погружения. Интеграция MEMS-гироскопов нового поколения с частотой опроса 2–10 кГц и улучшенным отношением сигнал/шум позволяет захватывать малейшие изменения ориентации за доли миллисекунд, сокращая фазу сбора данных.
Современные сенсоры, такие как стерео-гироскопы с двумя независимыми измерительными элементами на одном кристалле, параллельно фиксируют вращение по трём осям, исключая артефакты перекрёстных помех. Алгоритмы компенсации дрейфа нуля на основе машинного обучения динамически корректируют погрешности в реальном времени, а предсказание траектории движения (на 20–50 мс вперёд) по данным акселерометров и гироскопов нивелирует задержку рендеринга. В связке с низколатентными беспроводными интерфейсами (WiGig, 60 ГГц) это обеспечивает плавный поворот виртуальной камеры даже при экстремальном изменении позиции головы.
Технологические аспекты реализации
Ключевые параметры гироскопов для VR:
| Характеристика | Значение | Влияние на латенцию |
|---|---|---|
| Диапазон измерений | ±2000°/с и выше | Позволяет фиксировать резкие рывки без насыщения сигнала |
| Шумовая плотность | <0.0015 °/с/√Гц | Снижает необходимость цифровой фильтрации, ускоряя обработку |
| Время отклика | <1 мс | Минимизирует задержку на этапе сенсорного захвата |
Архитектурные решения для синхронизации:
- Fusion-сенсоры: комбинированные модули (IMU) с синхронизированными выходами гироскопов, акселерометров и магнитометров
- Локальная обработка: встроенные DSP внутри датчика для первичной фильтрации и компенсации температурных эффектов
- Пакетная передача: отправка данных блоками по 512 отсчётов с временными метками для точной реконструкции траектории
Беспроводные геймпады с тактильной обратной связью по углу отклонения
Современные геймпады оснащаются высокоточными МЭМС-гироскопами нового поколения, отслеживающими угловую скорость вращения по трем осям с частотой до 1000 Гц. Эти сенсоры, основанные на вибрационных резонаторах и оптической интерферометрии, обеспечивают детектирование малейших наклонов контроллера с погрешностью менее 0.01°/с. Беспроводная передача данных через Bluetooth 5.2 с LE Audio гарантирует минимальную задержку при синхронизации показаний с игровыми движками.
Тактильная обратная связь реализуется через сеть линейных резонансных моторчиков (LRA), распределенных по корпусу устройства. При отклонении геймпада система анализирует вектор угловой скорости и активирует вибрационные элементы с переменной амплитудой и частотой. Например, резкий поворот в гоночном симуляторе вызывает нарастающую пульсацию в соответствующей зоне рукоятки, а плавный наклон в стелс-игре генерирует легкое прерывистое дрожание.
Ключевые технологические аспекты
- Адаптивные алгоритмы: Машинное обучение калибрует отклик под индивидуальный хват пользователя
- Энергоэффективность: Датчики с пониженным энергопотреблением (менее 0.5 мВт) продлевают автономность
- Мультисенсорная интеграция: Синхронизация гироскопов с акселерометрами и магнитометрами
| Параметр | Традиционные решения | Новейшие системы |
|---|---|---|
| Диапазон измерений | ±200°/с | ±4000°/с |
| Шумовая плотность | 0.05°/с/√Гц | 0.001°/с/√Гц |
| Зоны тактильной обратной связи | 2-4 | 8-12 |
Агродроны: автоматическое выравнивание при опрыскивании под углом
Современные агродроны оснащаются высокоточными MEMS-гироскопами нового поколения, измеряющими угловую скорость с погрешностью менее 0,1°/с. Эти сенсоры непрерывно отслеживают крен и тангаж аппарата во время полёта над рельефной местностью, обеспечивая частоту опроса данных до 2 кГц. При обработке сигнала в реальном времени бортовой компьютер компенсирует внешние возмущения: порывы ветра, инерцию при разворотах, вибрации от двигателей.
Алгоритмы стабилизации анализируют показания гироскопов совместно с акселерометрами и данными GNSS-приёмников, вычисляя корректирующие импульсы для моторов. При опрыскивании склонов до 30° это позволяет удерживать дрон строго параллельно поверхности земли, сохраняя постоянную высоту распыления. Точность позиционирования сопла достигает ±3 см относительно целевой зоны даже при боковом ветре до 8 м/с.
Ключевые преимущества технологии
- Сохранение рабочей высоты: Датчики компенсируют до 15° крена без потери эффективности обработки
- Адаптация к рельефу: Автоматическое следование контуру склонов с точностью 97%
- Экономия химикатов: Снижение перерасхода препаратов на 22% за счёт устранения "мёртвых зон"
| Параметр | Без стабилизации | С угловыми датчиками |
|---|---|---|
| Отклонение сопла | До 40 см | Менее 5 см |
| Потери при ветре 6 м/с | 34% раствора | 8% раствора |
| Скорость обработки склонов | 3 га/час | 7 га/час |
Интеграция оптических сенсоров потока дополняет данные гироскопов, фиксируя микросдвиги относительно растений. При разворотах система использует предсказывающую коррекцию: за 0,05 сек до изменения траектории процессор рассчитывает компенсацию углового ускорения. Результат – равномерное покрытие листовой поверхности при скорости дрона до 12 м/с.
Контроль позиционирования роботов-сварщиков на конвейере
Внедрение MEMS-гироскопов нового поколения с оптической технологией измерения (OPA) обеспечивает точность угловой скорости до 0.001°/с, критичную для синхронизации движений манипулятора с непрерывно движущейся конвейерной линией. Эти датчики компенсируют вибрации от соседнего оборудования и температурные дрейты до 0.0005°/с/°C, сохраняя стабильность измерений в условиях цеха.
Интеграция инерциальных измерительных модулей (IMU) с лазерными трекерами в единую систему позиционирования позволяет корректировать траекторию сварочной головки с частотой обновления 10 кГц. Данные с гироскопов фильтруются через адаптивные алгоритмы Калмана, минимизируя кумулятивную ошибку позиционирования ниже 0.1 мм на 5 метров пути конвейера.
Ключевые технологические решения
- Двухосевая стабилизация гондолы с пьезоэлектрическими приводами, управляемыми по данным FOG-гироскопов
- Беспроводная синхронизация показаний датчиков на роботе и энкодерах конвейера через промышленный 5G
- Компенсация люфтов редукторов в реальном времени на основе предиктивной модели износа
| Параметр | Традиционные решения | Современные IMU |
|---|---|---|
| Дрейф нуля | 2–5°/ч | 0.01–0.03°/ч |
| Ударная стойкость | до 50g | более 10,000g |
| Время инициализации | 120–180 с | менее 5 с |
Цифровые двойники сварочных ячеек, обновляемые потоком данных с гироскопов, прогнозируют отклонения до их возникновения, сокращая брак на 23%. Встроенная диагностика кварцевых резонаторов в датчиках формирует предиктивные уведомления о замене модулей до выхода за допуски точности.
Биомеханический анализ угловых скоростей суставов в реальном времени
Применение инерциальных датчиков угловой скорости (IMU) с частотой дискретизации свыше 1 кГц обеспечивает захват быстрых движений без фазовых искажений. Миниатюрные гироскопы на основе MEMS-технологии, интегрированные в носимые сенсорные узлы, фиксируют трехосевую кинематику сегментов конечностей с точностью до 0.1°/с, позволяя отслеживать даже микроимпульсы при мышечном сокращении.
Калибровка сенсорных fusion-систем компенсирует дрейф нуля и гравитационные артефакты через алгоритмы машинного обучения, сопоставляя сырые данные гироскопов с эталонными движениями. Это критично для анализа сложных многоосевых вращений в плечевом или голеностопном суставах, где перекрестные помехи между осями достигают 5-7%.
Ключевые аспекты онлайн-анализа
Вычислительные модели суставных моментов в реальном времени используют угловые скорости как входные параметры для уравнений Эйлера. Дифференцирование кватернионов ориентации даёт производные угловых скоростей (dω/dt), необходимые для расчета кинетической энергии ротационного движения:
- Энергия вращения: Ek = 0.5 × I × ω2
- Момент силы: M = I × α + ω × (I × ω)
Диагностические индикаторы, вычисляемые на лету:
- Асимметрия пиковых скоростей сгибания/разгибания (порог >15% указывает на патологию)
- Резкие изменения производной (dω/dt) при контакте стопы с поверхностью
- Фазовый сдвиг угловых скоростей в парных суставах при ходьбе
| Параметр | Здоровый сустав | Посттравматический |
|---|---|---|
| Макс. скорость сгибания | 310±20°/с | 170±40°/с |
| Среднекв. отклонение ωz | <8°/с | >22°/с |
| Задержка реакции | 40±5 мс | 90±15 мс |
Беспроводные протоколы (Bluetooth 5.2, UWB) передают массив данных ωx,y,z(t) на внешние процессоры, где нейросетевые модели выделяют аномалии в 20-миллисекундных временных окнах. Экстренное предупреждение о риске вывиха генерируется при превышении пороговых значений угловой скорости и её первой производной.
Адаптивные фильтры для работ в условиях электромагнитных бурь
Электромагнитные бури генерируют мощные низкочастотные помехи (0.1–10 Гц), способные паразитно наводиться на цепи датчиков угловой скорости через индуктивную связь или заземление. Эти помехи маскируют полезный сигнал, вызывая дрейф нуля и снижая точность измерений на 1-2 порядка. Традиционные фильтры Калмана демонстрируют неэффективность из-за нестационарного характера помех и их спектрального перекрытия с рабочим диапазоном MEMS- и волоконно-оптических гироскопов.
Адаптивные RLS-фильтры (Recursive Least Squares) с переменной забывающей константой автоматически подстраивают весовые коэффициенты в реальном времени, анализируя статистику помехи. Алгоритм использует референсный сигнал от дополнительного магнитометра или датчика электрического поля, что позволяет выделять коррелированную составляющую шума. Скорость адаптации регулируется экспоненциальным окном, сужаемым при обнаружении всплесков геомагнитной активности по данным спутникового мониторинга NOAA.
Ключевые архитектурные решения
- Каскадная структура: Последовательное применение FIR-фильтрации (подавление импульсных выбросов) и адаптивного RLS-блока для компенсации низкочастотного дрейфа
- Нейросетевая коррекция: Дополнительная постобработка LSTM-сетью для предсказания остаточных ошибок на основе исторических данных о помехах
- Гибридная тактовая синхронизация: Использование GPS-меток времени для компенсации фазовых сдвигов в распределенных сенсорных сетях
| Параметр | Классический фильтр Калмана | Адаптивный RLS-фильтр |
| Подавление помех (20 дБ/Гц) | 6–8 дБ | 18–22 дБ |
| Задержка обработки | < 2 мс | < 5 мс |
| Потребление памяти | 12 КБ | 28 КБ |
| Устойчивость к скачкам помех | Низкая | Высокая |
Внедрение требует аппаратного ускорения матричных операций: сопроцессоры Cortex-M7 выполняют 1.2 млн адаптаций/сек при энергопотреблении 110 мВт. Тесты в магнитосферных аномалиях (регион SAA) подтвердили сохранение точности ±0.002 °/с при помехах до 50 мТл/с, что критично для спутниковых платформ и автономных БПЛА. Перспективы связаны с квантовыми сенсорами, где адаптация реализуется через управление спиновыми ансамблями.
Диагностика дрейфа параметров в процессе эксплуатации
Непрерывный мониторинг дрейфа нуля и масштабного коэффициента критичен для сохранения точности гироскопов MEMS и FOG в полевых условиях. Автоматизированные системы диагностики внедряются непосредственно в измерительные цепи, отслеживая отклонения характеристик при изменении температурных режимов, вибрационных нагрузок и времени наработки. Алгоритмы машинного обучения анализируют исторические данные сенсоров, прогнозируя скорость деградации параметров и формируя предиктивные уведомления.
Встроенные эталонные контуры выполняют самопроверку путем генерации тестовых угловых скоростей и сравнения выходного сигнала с калибровочными эталонами. Для квантовых гироскопов применяются методы когерентной томографии, выявляющие микроскопические изменения в атомных облаках. Корректирующие коэффициенты автоматически загружаются в прошивку, компенсируя дрейф без демонтажа оборудования.
Ключевые методы верификации
- Многоуровневые температурные калибровки – динамическая коррекция смещения нуля в диапазоне -40°C…+85°C
- Спектральный анализ шумов – идентификация низкочастотных дрейфов по фликер-шуму в 0.1-10 Гц полосе
- Векторное сопоставление данных – кросс-валидация показаний с акселерометрами и магнитометрами в IMU
| Параметр | Метод диагностики | Допустимый дрейф |
|---|---|---|
| Смещение нуля (bias) | Статистика при нулевом вращении | < 0.5 °/ч (MEMS III класса) |
| Нестабильность масштаба | Вращательные тесты с эталонными скоростями | < 200 ppm/год |
| Неортогональность осей | 3D-сканирование в гониометрическом стенде | < 0.05 мрад |
Для RLG и FOG применяются методы рефлектометрии, обнаруживающие деградацию оптических волокон по обратному рассеянию Рэлея. В гибридных системах данные с опорных атомных гироскопов используются как метрика для калибровки MEMS-сенсоров. Протоколы IEEE P2020 стандартизируют критерии оценки долговременной стабильности, включая тесты на термоудар и механический стресс.
Интерфейсы промышленной коммуникации: CAN vs Ethernet Time-Sensitive Networking
При интеграции современных датчиков угловой скорости в промышленные системы выбор интерфейса критически влияет на производительность и надёжность. CAN (Controller Area Network) десятилетиями доминировал в задачах реального времени благодаря детерминированной передаче, простоте архитектуры и устойчивости к помехам. Его низкая пропускная способность (до 1 Мбит/с) ограничивает применение для высокочастотных измерений MEMS- или FOG-сенсоров, генерирующих большие потоки данных.
Ethernet Time-Sensitive Networking (TSN) устраняет ключевой недостаток классического Ethernet – недетерминированность. Стандарты IEEE 802.1 (AS, Qbv, Qbu) гарантируют микросекундную синхронизацию и предсказуемую доставку пакетов. Пропускная способность (от 100 Мбит/с до 100 Гбит/с) позволяет передавать сырые данные с прецизионных гироскопов для комплексного анализа, поддерживая мультисенсорную агрегацию в единой сети.
Ключевые сравнительные аспекты
- Детерминизм: CAN обеспечивает жёсткое время отклика через приоритетную арбитрацию. TSN использует планировщики трафика и прерывание для резервирования полосы под критичные данные.
- Пропускная способность: CAN ограничен для задач с высокой частотой дискретизации. TSN поддерживает потоковую передачу несжатых данных с частотой >10 кГц.
- Топология: CAN – шина с ограниченной масштабируемостью. TSN работает в сетях любой сложности (звезда, кольцо) с поддержкой резервирования.
| Параметр | CAN | Ethernet TSN |
|---|---|---|
| Задержка передачи | Микросекунды (фиксированная) | Наносекунды (гарантированная) |
| Совместимость с ПО | Требует специфичных стеков (CANopen) | Интеграция с IP-инфраструктурой и облаками |
| Энергопотребление | Низкое | Высокое (требует оптимизации) |
Для решений с ИИ-обработкой инерциальных данных TSN предпочтителен из-за совместимости с edge-вычислениями. В мобильной робототехнике или авионике, где весомы простота и энергоэффективность, CAN сохраняет актуальность для агрегированных показаний.
Экономичные сенсоры для массового применения в потребительской электронике

Современные MEMS-гироскопы достигли беспрецедентного уровня миниатюризации и энергоэффективности, что открыло возможности для их интеграции в массовые устройства. Производители активно внедряют архитектуры с пониженным энергопотреблением, такие как режимы "wake-on-motion", где датчик потребляет микроамперы в состоянии покоя и мгновенно активируется при обнаружении движения. Это критически важно для носимых гаджетов и IoT-устройств, работающих от компактных батарей годами без замены.
Себестоимость производства снижается за счет кремниевой массовой обработки пластин и стандартизации технологических процессов. Новые решения используют монолитные интегральные схемы, объединяющие чувствительный элемент и ASIC-контроллер в одном корпусе. Это не только уменьшает размеры сенсоров до 2×2×0.7 мм, но и упрощает пайку на печатные платы, сокращая расходы на сборку финальных изделий.
Ключевые технологические инновации
- Цифровая коррекция погрешностей: Встроенные алгоритмы компенсации температурного дрейфа и вибрационных шумов
- Автоматическая калибровка: Фабричная настройка параметров без дополнительных компонентов в устройстве
- Совмещенные сенсоры: Гибридные модули "6-DoF" (гироскоп + акселерометр) с единым интерфейсом связи
| Параметр | Поколение-1 | Поколение-2 |
|---|---|---|
| Потребление (рабочий режим) | 3.5 мА | 0.8 мА |
| Стоимость (серийная) | $1.50 | $0.35 |
| Дрейф нуля (°/ч) | 200 | 25 |
Массовое внедрение стимулирует развитие универсальных драйверов и открытых библиотек для микроконтроллеров, ускоряющих разработку. Производители смартфонов уже используют гироскопы в трёх сценариях: стабилизация видео, AR-навигация и управление жестами. В сегменте носимой электроники датчики обеспечивают точный подсчёт шагов и распознавание активности даже в бюджетных фитнес-браслетах.
- Оптимизация производственных линий за счёт отказа от вакуумных камер
- Переход на корпусирование по технологии WLCSP (Wafer-Level Chip Scale Package)
- Использование алгоритмов машинного обучения для компенсации производственного разброса параметров
Экранирование высокочастотных помех в моторных отсеках
Интенсивные электромагнитные поля, генерируемые силовыми инверторами, стартерами и системами зажигания в моторном отсеке, создают сложную среду для работы высокоточных MEMS и оптоволоконных гироскопов. Эти помехи, особенно в диапазоне от десятков кГц до нескольких ГГц, способны индуцировать паразитные токи в цепях датчиков, искажая выходной сигнал угловой скорости и снижая точность измерений. Без эффективного экранирования шумы маскируют полезный сигнал, критичный для систем стабилизации и навигации.
Современные подходы к экранированию включают многоуровневую защиту, начиная с корпуса самого датчика. Корпуса гироскопов выполняются из сплавов с высокой магнитной проницаемостью (например, мю-металл) или покрываются проводящими составами, образуя клетку Фарадея. Внутри корпуса критичные тракты сигнала экранируются фольгированными перегородками, а печатные платы проектируются с заземленными полигонами на внутренних слоях. Кабельные соединения используют витую пару в комбинированных экранах: оплетку для высоких частот и фольгу для средних, с обязательным круговым обжатием коннекторов для исключения щелей.
Ключевые решения для подавления помех
- Фильтрация на входе/выходе: Установка ферритовых колец и SMD-фильтров (LC, π-фильтры) непосредственно на клеммах датчика для подавления синфазных и дифференциальных помех.
- Активная компенсация: Использование компенсационных катушек в схеме гироскопа, генерирующих противофазное поле для нейтрализации внешних магнитных наводок.
- Гальваническая развязка: Применение оптоизоляторов или трансформаторной развязки в интерфейсных цепях для разрыва контуров заземления – частого источника помех.
Валидация экранирования проводится при помощи тестов по стандарм ISO 11452 (компонентный уровень) и ISO 7637 (транзиентные помехи). Датчик подвергается воздействию полей до 200 В/м в реверберационной камере, а его выход анализируется на предмет отклонений при работе имитаторов систем зажигания или ШИМ-контроллеров двигателя. Устойчивость к помехам напрямую влияет на соответствие требованиям функциональной безопасности (ISO 26262 ASIL B/D) в автомобильных и аэрокосмических приложениях.
Ресурсные испытания при непрерывной вибрации свыше 20g
Ресурсные испытания гироскопов и акселерометров в условиях непрерывной вибрации с ускорением, превышающим 20g, являются критически важным этапом валидации для применения в экстремальных средах. Цель – не просто подтвердить кратковременную работоспособность, а гарантировать сохранение заявленных метрологических характеристик (нулевого смещения, масштабного коэффициента, чувствительности) и структурной целостности в течение всего расчетного срока службы изделия при длительном воздействии экстремальных механических нагрузок.
Методика испытаний предполагает помещение датчика на мощный электродинамический вибростенд, способный генерировать заданные уровни ускорения в требуемых частотных диапазонах (типично от 20 Гц до 2-10 кГц) на протяжении сотен или тысяч часов. Испытания часто проводятся по профилям, специфичным для целевого применения (например, имитация вибраций реактивного двигателя, работы тяжелой техники или полета гиперзвукового аппарата), включая многокомпонентное воздействие.
Ключевые аспекты и наблюдаемые явления
В ходе длительных испытаний под высокой вибрационной нагрузкой особое внимание уделяется мониторингу следующих параметров и потенциальных отказов:
- Дрейф нуля и параметров: Постоянное вибрационное воздействие может вызывать необратимые сдвиги точки нуля (bias), изменения масштабного коэффициента (scale factor) и нелинейностей. Это связано с микро-деформациями чувствительных элементов, крепежа, корпуса и усталостью материалов.
- Резонансные явления: Выявление и контроль собственных резонансных частот механической конструкции датчика и его элементов. Возбуждение резонанса на высоких g-нагрузках многократно увеличивает локальные напряжения и является основной причиной ускоренного выхода из строя.
- Механическая усталость и разрушение: Появление микротрещин в корпусе, подложках, сварных швах или соединениях; разрушение деликатных внутренних элементов (микромеханических структур MEMS, кварцевых балок, оптических компонентов); ослабление или разрушение электрических соединений (проводков, шариков BGA); деградация демпфирующих материалов.
- Изменение электронных характеристик: Вибрация может вызывать паразитные электрические наводки, микроразрывы в проводниках или контактах разъемов, что приводит к сбоям в работе ASIC, шумам в сигнале, полной потере связи.
- Тепловые эффекты: Высокочастотная вибрация сама по себе генерирует тепло в материале. В сочетании с вибрационным нагревом корпуса и электроники это может привести к локальным перегревам и термической деградации компонентов, не выявленной при стандартных температурных испытаниях.
Результаты таких ресурсных испытаний напрямую определяют применимость датчика в критических системах:
- Валидация конструкции и технологии: Подтверждение правильности выбранных материалов, методов сборки, схемы демпфирования и защитных мер.
- Определение реального ресурса: Установление фактического срока службы в условиях, максимально приближенных к эксплуатационным.
- Повышение надежности систем: Гарантия безотказной работы навигационных, управляющих и стабилизирующих систем летательных аппаратов, ракет, высокоточного промышленного оборудования, где отказ датчика недопустим.
Разные технологии датчиков демонстрируют различную устойчивость к длительной вибрации свыше 20g:
| Технология | Ключевые риски при длительной вибрации >20g | Потенциал устойчивости |
|---|---|---|
| MEMS (Кремний/Кварц) | Разрушение тонких подвижных структур, усталость подвесов, резонанс, отслоение покрытий. | Высокий при специализированной конструкции и герметизации. |
| Пьезоэлектрические (CVG) | Трещины в пьезокерамике, деградация сварных швов резонатора, сдвиг резонансной частоты. | Очень высокий (основаны на вибрации), но критична точность изготовления. |
| Волоконно-оптические (FOG) | Микроизгибы волокна, расстройка оптических компонентов, разъюстировка, наводки в электронике. | Высокий (нет подвижных мех. частей), но электроника и сборка уязвимы. |
| RLG (Кольцевой лазерный) | Деформация точного блока резонатора, смещение зеркал, загрязнение газовой смеси, сбои электроники. | Очень высокий, но требует массивной конструкции. |
Успешное прохождение ресурсных испытаний при вибрации свыше 20g становится ключевым индикатором технологической зрелости и надежности современных датчиков угловой скорости для ответственных применений в аэрокосмической, оборонной и высокоточной промышленной сферах, где условия эксплуатации сопряжены с экстремальными механическими нагрузками на протяжении всего жизненного цикла изделия.
Соответствие стандартам DO-160 для авиационных применений
Стандарт RTCA DO-160G определяет минимальные эксплуатационные требования к бортовому авиационному оборудованию при воздействии внешних факторов. Для датчиков угловой скорости соответствие этому стандарту критически важно, так как они интегрируются в системы навигации, управления полетом и стабилизации. Несоблюдение требований DO-160 ставит под угрозу сертификацию воздушного судна и безопасность эксплуатации.
Современные MEMS- и FOG-датчики угловой скорости проектируются с учетом жестких критериев DO-160. Производители проводят комплексные испытания на устойчивость к вибрациям, ударам, температурным перепадам, влажности и электромагнитным помехам. Это гарантирует сохранение точности измерений в экстремальных условиях: от взлета/посадки до полета в зонах турбулентности или грозовой активности.
Ключевые аспекты испытаний по DO-160
| Тип воздействия | Раздел DO-160 | Требования к датчикам |
|---|---|---|
| Температурные перепады | Раздел 4 | Работоспособность в диапазоне -55°C до +85°C |
| Виброустойчивость | Разделы 7-8 | Сохранение точности при вибрациях до 2000 Гц |
| Ударные нагрузки | Раздел 7 | Устойчивость к пиковым ускорениям 6g |
| ЭМ-совместимость | Разделы 15-25 | Иммунитет к радиопомехам до 20 В/м |
| Влагостойкость | Раздел 6 | Защита от конденсата и брызг |
Для достижения соответствия применяются специализированные решения: герметичные корпуса с металлическим экранированием, термостабильные материалы чувствительных элементов, алгоритмы компенсации помех. Сертификация проводится в аккредитованных лабораториях с фиксацией результатов в протоколах испытаний. Современные датчики также поддерживают требования DO-178C по уровню DAL-A для критических систем.
Бессвинцовые припои в экологически сертифицированных компонентах
Переход на бессвинцовые припои стал критическим требованием для производителей гироскопов и акселерометров, обусловленным глобальными директивами RoHS и REACH, жестко ограничивающими применение свинца в электронике. Это напрямую затрагивает сборку MEMS-структур и корпусирование датчиков угловой скорости, где традиционные свинцовосодержащие составы обеспечивали предсказуемую смачиваемость и прочность соединений. Экологическая сертификация компонентов, включая сами кристаллы, подложки и корпуса, требует полного исключения запрещенных веществ на всех этапах производства.
Использование альтернатив на основе олова, серебра и меди (SAC) вносит технологические сложности: повышенные температуры пайки (до 260°C против 220°C у SnPb) создают риски термического повреждения чувствительных элементов гироскопов. Различия в коэффициентах теплового расширения материалов могут провоцировать микротрещины в межсоединениях при термоциклировании, что критично для надежности в экстремальных условиях эксплуатации. Производители компенсируют это прецизионным контролем профилей нагрева, модификацией конструктивов корпусов и применением легированных добавок (например, висмута или сурьмы) для улучшения механических свойств паяного шва.
Ключевые аспекты интеграции и контроля
Гарантировать стабильность параметров датчиков при переходе на бессвинцовые технологии требует комплексного подхода:
- Валидация материалов: Каждый припой и флюс проходят испытания на совместимость с кремниевыми MEMS-элементами и герметиками корпусов под воздействием вибраций и перепадов температур.
- Мониторинг паяных соединений: Автоматизированный оптический контроль (AOI) и рентгенография выявляют скрытые дефекты: пустоты, перегрев или неполную смачиваемость контактных площадок.
- Ускоренные тесты надежности: Обязательные термоциклические испытания (-55°C…+125°C) и проверки на механическую усталость для подтверждения соответствия стандартам AEC-Q100 и MIL-STD.
| Характеристика | SnPb-припой | Бессвинцовый SAC |
| Темп. плавления | ~183°C | 217–227°C |
| Прочность на разрыв | Низкая | Высокая |
| Склонность к усталости | Умеренная | Повышенная (без модификаторов) |
| Экологический класс | RoHS non-compliant | RoHS/REACH compliant |
Современные решения включают наноструктурированные припои с керамическими присадками, снижающими внутренние напряжения в точках крепления чувствительного элемента гироскопа. Это особенно важно для высокоточных FOG (волоконно-оптических гироскопов) и RLG (кольцевых лазерных гироскопов), где вибрации от неоптимальных паяных соединений напрямую влияют на дрейф нуля и шумовые характеристики.
Выбор типа датчиков для ветроэнергетических установок: градиенты ветра
Измерение градиентов ветра критично для оптимизации угла атаки лопастей и минимизации механических нагрузок. Традиционные анемометры неспособны отслеживать резкие пространственные изменения скорости и направления воздушных потоков на роторе. Требуются датчики угловой скорости с исключительной точностью в условиях вибраций, перепадов температур и электромагнитных помех.
Оптические гироскопы (FOG) демонстрируют превосходную стабильность нулевого сигнала и устойчивость к ударным воздействиям, но их стоимость и энергопотребление ограничивают массовое применение. MEMS-гироскопы нового поколения с цифровой коррекцией погрешностей обеспечивают достаточную точность при экстремально низком энергопотреблении, что критично для автономных установок. Ключевым параметром становится диапазон измеряемых угловых скоростей, учитывающий турбулентность.
Критерии выбора и интеграция
Приоритетными характеристиками являются:
- Динамический диапазон: ≥1000°/с для захвата микротурбулентности
- Температурная стабильность: компенсация дрейфа в диапазоне -40°C...+85°C
- Помехоустойчивость: фильтрация низкочастотных вибраций от лопастей
Современные решения используют гибридные системы с MEMS-гироскопами на каждой лопасти и опорным FOG в гондоле. Данные обрабатываются алгоритмами машинного обучения для прогнозирования градиентов. Пример характеристик:
| Тип датчика | Погрешность (°/ч) | Срок службы | Применимость |
|---|---|---|---|
| Прецизионные MEMS | 0,5-2 | >15 лет | Лопасти, генератор |
| FOG | 0,01-0,1 | >20 лет | Опорные измерения в гондоле |
Внедрение требует калибровки по аэродинамическим моделям конкретной турбины. Тренд – беспроводные сенсорные сети с автономным питанием, передающие данные в режиме реального времени для адаптивного управления шагом лопастей.
Машинное обучение для прогнозирования отказов по изменению сигнатуры вибраций
Современные высокоточные MEMS-гироскопы и волоконно-оптические гироскопы (ВОГ) генерируют не только данные об угловой скорости, но и содержат встроенные или сопутствующие акселерометры, непрерывно регистрирующие вибрации конструкции. Эти вибрации формируют уникальную "сигнатуру" нормальной работы механических узлов вращения (подшипников, редукторов, роторов). Малейшие дефекты, такие как усталостные трещины, выкрашивание тел качения, дисбаланс или ослабление креплений, вызывают характерные изменения в спектральном составе, амплитуде и статистических параметрах вибрационного сигнала.
Машинное обучение (МО) становится ключевым инструментом для анализа этих массивов данных вибрации в реальном времени. Алгоритмы МО способны выявлять сложные, неочевидные для традиционных пороговых методов или эксперта, корреляции и аномалии в сигналах, предшествующие явному отказу. Это позволяет перейти от реактивного обслуживания (по факту поломки) или планово-предупредительного (по расписанию) к предиктивному обслуживанию, основанному на фактическом состоянии оборудования.
Ключевые этапы применения МО для предиктивного обслуживания на основе вибраций
Рабочий процесс включает несколько последовательных этапов:
- Сбор данных: Непрерывная или высокочастотная дискретная запись сигналов вибрации с датчиков, интегрированных с гироскопами или установленных на критических узлах.
- Предобработка данных:
- Фильтрация (устранение шумов, выделение полезных частотных полос).
- Нормализация/стандартизация.
- Сегментация сигналов (например, по оборотам вала с использованием данных гироскопа).
- Извлечение признаков (Features Extraction).
- Извлечение признаков: Преобразование исходных временных рядов вибрации в информативные признаки:
- Статистические: Среднеквадратическое значение (RMS), пик-фактор, эксцесс, асимметрия.
- Временные: Огибающая сигнала, анализ импульсов.
- Частотные (спектральные): Быстрое преобразование Фурье (FFT), выделение гармоник, субгармоник, анализ огибающей спектра (Envelope Analysis) для выявления характерных частот подшипников.
- Время-частотные: Вейвлет-преобразование, анализ Хуанга-Хилберта (HHT) для нестационарных сигналов.
- Выбор и обучение модели: Подбор алгоритма МО, наиболее подходящего для задачи классификации состояния или регрессии (прогноза остаточного ресурса).
- Валидация и тестирование: Оценка качества модели на независимых данных, не участвовавших в обучении.
- Развертывание и мониторинг: Внедрение модели в реальную систему для онлайн-анализа, непрерывный мониторинг ее производительности и переобучение по мере необходимости.
Особую роль играет извлечение признаков и выбор модели. Для работы с редкими событиями отказов (несбалансированные данные) применяются техники oversampling/undersampling, cost-sensitive learning или генеративные модели (GANs, VAEs) для синтеза реалистичных данных отказов.
Типы моделей МО для анализа вибраций
| Тип модели | Примеры алгоритмов | Преимущества | Недостатки / Особенности |
|---|---|---|---|
| Классические ML | SVM, Random Forest, Gradient Boosting (XGBoost, LightGBM), k-NN | Интерпретируемость (особенно деревья), хорошая работа на тщательно отобранных признаках, относительная простота. | Требуют экспертного извлечения признаков, могут хуже работать с необработанными сигналами. |
| Глубокое обучение (Deep Learning) | Сверточные нейронные сети (CNN), Рекуррентные нейронные сети (RNN, LSTM, GRU), Автокодировщики (AEs) | Способны автоматически извлекать признаки из сырых данных (спектрограмм, вейвлетов, временных рядов), высокая точность на сложных данных. | Требуют больших объемов данных для обучения, сложнее в интерпретации ("черный ящик"), вычислительно затратны. |
| Гибридные подходы | CNN + LSTM, Извлечение признаков + классический ML/DL | Комбинируют сильные стороны подходов: например, CNN для анализа спектрограмм и LSTM для учета временных зависимостей. | Повышенная сложность разработки и настройки. |
Валидация и метрики критически важны из-за серьезных последствий ложных срабатываний (ложная тревога) или пропусков отказов (False Negative). Используют Precision, Recall, F1-Score (особенно важен при дисбалансе классов), ROC-AUC, специфичные для технического состояния метрики. Кросс-валидация обязательна.
Интеграция моделей МО в системы управления на основе данных с гироскопов и акселерометров позволяет не только предсказывать отказы, но и оптимизировать работу механизмов, снижая вибрации и износ. Это обеспечивает значительное повышение надежности, безопасности и экономической эффективности современных решений в аэрокосмической отрасли, робототехнике, энергетике и промышленном оборудовании, сокращая незапланированные простои и затраты на обслуживание.
Архитектура System-in-Package для объединения MEMS и ASIC
Архитектура System-in-Package (SiP) представляет собой ключевой подход для интеграции MEMS-сенсора угловой скорости и специализированной интегральной схемы (ASIC) в едином компактном корпусе. Вместо размещения компонентов на печатной плате, SiP объединяет их на подложке или интерпозере, используя технологии 2.5D или 3D-интеграции. Это позволяет располагать чувствительный MEMS-элемент в непосредственной близости от схем обработки сигнала ASIC, минимизируя длину соединительных проводников.
Такая интеграция существенно снижает паразитные емкости и индуктивности межсоединений, что критично для высокоточных измерений малых угловых скоростей. ASIC в SiP выполняет функции аналоговой обработки сигналов с MEMS-структур, температурной компенсации, цифровой фильтрации и калибровки, обеспечивая готовый цифровой выход. Использование герметичных корпусов защищает механические элементы MEMS от внешних воздействий, сохраняя стабильность характеристик.
Преимущества и ключевые особенности
Основные преимущества SiP-архитектуры для MEMS-гироскопов включают:
- Миниатюризацию: Габариты решения сокращаются на 30-50% по сравнению с дискретными сборками.
- Повышенное соотношение сигнал/шум: Укороченные тракты передачи сигнала снижают наводки и тепловой шум.
- Улучшенную стабильность: Совместная компенсация температурных дрейфов MEMS и ASIC внутри одного корпуса.
- Гибкость технологий: Возможность комбинировать специализированные техпроцессы: оптимизированный для механики MEMS и высокоплотный для логики ASIC.
Ключевые технологические решения в SiP для гироскопов:
| Технология | Назначение | Примеры |
|---|---|---|
| Кремниевые переходы (TSV) | Вертикальная интеграция кристаллов | 3D-стэкирование ASIC над MEMS |
| Органические интерпозеры | Горизонтальное соединение компонентов | Паттернирование медных дорожек |
| Wafer-Level Packaging | Герметизация на уровне пластины | Каппирование припоем или стеклом |
Современные SiP-реализации активно используют активные интерпозеры со встроенными пассивными компонентами для подавления помех и адаптивные алгоритмы калибровки, работающие непосредственно в ASIC. Это обеспечивает точность измерений на уровне < 0.1°/с в компактных корпусах формата 3x3 мм, востребованных в дронах, AR-очках и промышленной робототехнике.
Схемы резервирования в аэрокосмических системах управления
Современные инерциальные измерительные блоки (ИИБ) интегрируют новейшие волоконно-оптические и МЭМС-датчики угловой скорости, чья точность критична для навигации. Для обеспечения безотказной работы в экстремальных условиях применяются многоуровневые схемы резервирования. Эти архитектуры дублируют не только сами сенсоры, но и цепи питания, процессоры обработки данных и каналы коммуникации.
Ключевой принцип – избыточность с независимыми каналами измерения. Например, квадруплексные конфигурации ИИБ используют четыре идентичных датчика угловой скорости, физически разнесённых и подключённых к разным источникам энергии. Системы мониторинга в реальном времени сравнивают их показания, автоматически исключая сбойный сенсор из контура управления. При этом алгоритмы голосования (например, "2 из 4") минимизируют риск ложного отказа.
Типовые архитектуры резервирования
Основные подходы включают:
- Дублирование (Dual Redundancy): Минимальная конфигурация "основной + резервный" канал с ручным/автоматическим переключением при превышении порога невязки сигналов.
- Тройное модульное резервирование (TMR): Три параллельных канала с мажоритарным арбитром, мгновенно выбирающим медианное значение. Требует сложной синхронизации данных.
- Гибридные схемы: Комбинация аппаратного и информационного резервирования (например, дублированные ИИБ + корреляция с данными спутниковой навигации).
Особое внимание уделяется разнородности технологий: совместное использование волоконно-оптических гироскопов (ВОГ) и МЭМС-сенсоров в одном блоке нивелирует общие причины отказов. ВОГ обеспечивают прецизионную точность на маршевых участках, тогда как твердотельные МЭМС устойчивы к ударным нагрузкам при старте.
| Параметр | Дублирование | TMR | Гибридное |
|---|---|---|---|
| Надёжность (вероятность отказа) | ~10⁻⁴ | ~10⁻⁶ | ~10⁻⁷ |
| Задержка переключения | 5-20 мс | <1 мс | 1-5 мс |
| Масса/энергопотребление | Низкое | Высокое | Среднее |
Перспективные разработки внедряют нейросетевые алгоритмы для прогнозирования деградации датчиков по косвенным параметрам (температурный дрейф, уровень шумов). Это позволяет переключаться на резерв до возникновения критической ошибки, сокращая время реакции системы на 40-60%.
Лазерные гироскопы нового поколения: отказ от механических подшипников
Ключевым прорывом стало внедрение принципиально иных методов поддержания резонанса оптического контура, полностью исключающих подвижные механические компоненты. Вместо традиционных подшипников, ограничивавших точность и долговечность, в современных лазерных гироскопах применяются бесконтактные технологии стабилизации.
Основой конструкции выступает твердотельный блок из сверхнизкорасширяемого материала (например, кварцевого стекла или керамики), внутри которого фрезерованы три взаимно перпендикулярных кольцевых оптических канала. Лазерные пучки циркулируют в этих герметичных полостях, а измерение угловой скорости происходит через анализ разности фаз встречных лучей (эффект Саньяка).
Критические инновации бесконтактных систем
Стабильность работы обеспечивают два фундаментальных решения:
- Динамическая электростатическая подвеска: Система управляемых электродов по внешним поверхностям блока создает регулируемые электростатические поля, компенсирующие малейшие смещения корпуса прибора без физического контакта.
- Интегрированные пьезоэлектрические актюаторы: Встроенные в корпус гироскопа пьезоэлементы генерируют высокочастотные вибрации строго заданной амплитуды. Это подавляет эффект "захвата" (lock-in) – главный источник погрешности на малых скоростях вращения.
Преимущества таких гироскопов радикально меняют эксплуатационные характеристики:
| Параметр | Традиционные гироскопы | Бесконтактные лазерные гироскопы |
| Срок службы | Ограничен износом подшипников | > 100 000 часов (теоретически неограничен) |
| Ударопрочность | Чувствительны к вибрациям | До 1000 g (кратковременно) |
| Порог чувствительности | Высокий из-за трения | <0.001 °/ч |
Отказ от подшипников устранил главные источники дрейфа нуля и шумов, связанные с сухим трением, люфтами и деградацией смазки. Это обеспечило рекордную стабильность параметров в экстремальных условиях: при температурах от -55°C до +85°C, в условиях сильных вибраций и агрессивных сред. Применение данных гироскопов критично для прецизионных систем навигации космических аппаратов, стратегических БПЛА и подводных роботов, где надежность напрямую определяет успех миссии.
Список источников
При подготовке материала использовались научные публикации, техническая документация производителей и обзоры современных технологий в области инерциальных измерений.
Анализ охватывает актуальные разработки в сфере MEMS-гироскопов, волоконно-оптических и квантовых датчиков, а также их применение в навигационных системах и робототехнике.
Научные публикации и обзоры
- Журнал "Гироскопия и навигация" - Исследования по точности МЭМС-гироскопов нового поколения
- IEEE Sensors Journal - Сравнительный анализ оптоэлектронных датчиков угловой скорости (2020-2023 гг.)
- Материалы конференции ION GNSS+ - Отчеты о внедрении твердотельных гироскопов в спутниковые системы
Техническая документация

- Спецификации Analog Devices ADIS16507 - Многоосевой цифровой MEMS-гироскоп
- Даташиты Honeywell HG1120 - Волоконно-оптические гироскопы для аэрокосмической отрасли
- Белые книги Bosch Sensortec - Технология BMG250 для носимой электроники
Отраслевые исследования
- Обзор Yole Développement "MEMS Industry Report 2023" - Тенденции рынка гироскопических датчиков
- Исследование Фонда перспективных исследований - Квантовые сенсоры для прецизионной навигации
- Монография "Современные инерциальные системы" под ред. Иванова А.А. - Глава 4: Калибровка гироскопов