Что такое парктроник и как он работает
Статья обновлена: 28.02.2026
Парковка автомобиля в ограниченном пространстве – задача, требующая повышенного внимания и точности. Даже опытные водители могут столкнуться с трудностями при маневрировании в тесных условиях, особенно при отсутствии полного обзора вокруг транспортного средства.
Для минимизации риска столкновений с препятствиями во время парковки и повышения общего уровня безопасности был создан специальный электронный помощник – парковочный радар, более известный как парктроник.
Это устройство стало неотъемлемым атрибутом современного автомобиля, существенно упрощающим процесс парковки за счет постоянного контроля пространства вокруг машины и своевременного предупреждения водителя о приближении к невидимым объектам.
Ключевые компоненты парковочного радара
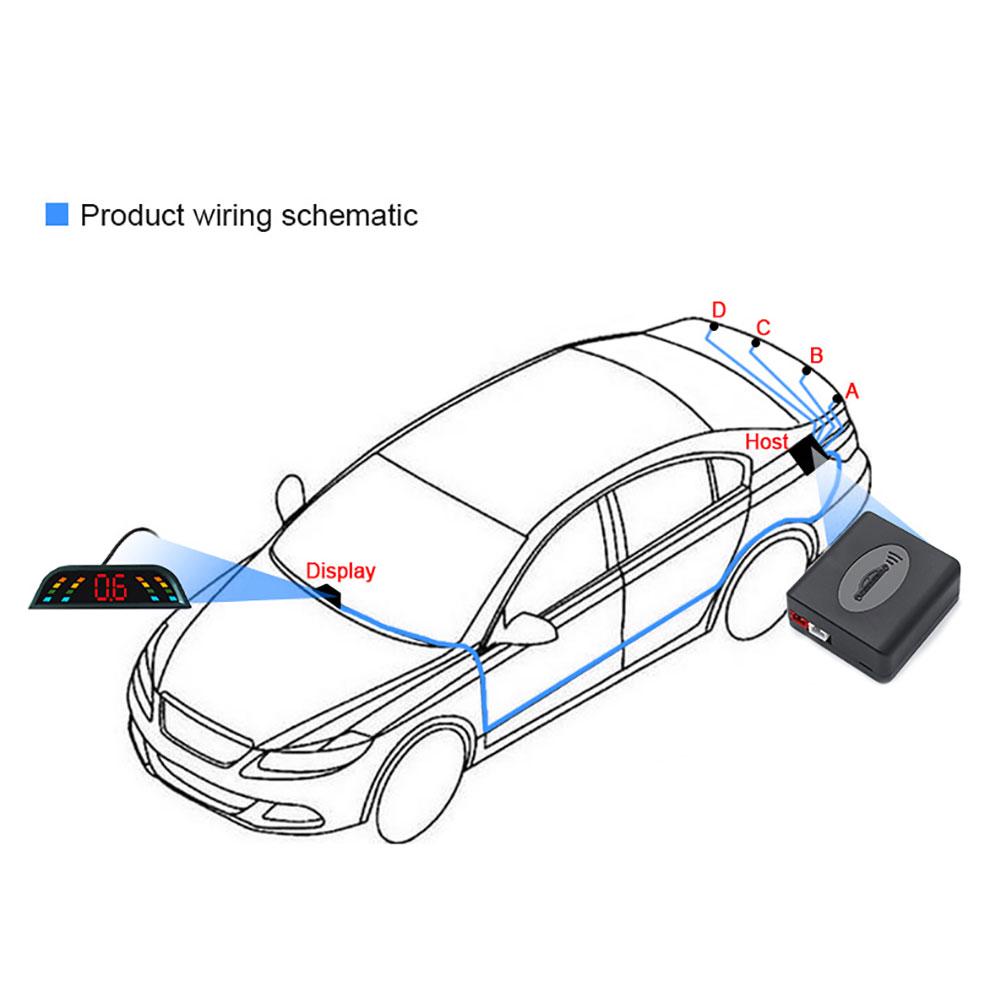
Парковочный радар объединяет несколько технических элементов, обеспечивающих его корректную работу. Основные составляющие включают сенсоры для обнаружения объектов, блок обработки данных и систему информирования водителя.
Каждый элемент выполняет строго определенную функцию, формируя последовательную цепочку действий: от сканирования пространства до предупреждения о риске столкновения. Рассмотрим эти компоненты детально.
Составные части системы

- Ультразвуковые датчики: Монтируются в бамперах (обычно 2-8 штук). Генерируют высокочастотные звуковые волны (20-40 кГц) и фиксируют их отражение от препятствий.
- Электронный блок управления (ЭБУ): Анализирует время возврата сигнала от датчиков, вычисляя расстояние до объектов. Координирует работу всей системы.
- Система оповещения:
- Звуковая: Издает прерывистые сигналы (бипер), учащающиеся при приближении к препятствию
- Визуальная: Графический дисплей или светодиодные индикаторы, отображающие дистанцию и сектор обнаружения
| Компонент | Материал корпуса | Устойчивость к воздействиям |
|---|---|---|
| Датчики | Пластик/металл | Вода, грязь, вибрации |
| Блок управления | Термостойкий пластик | Температура (-40°C...+85°C) |
Физический принцип работы ультразвуковых датчиков
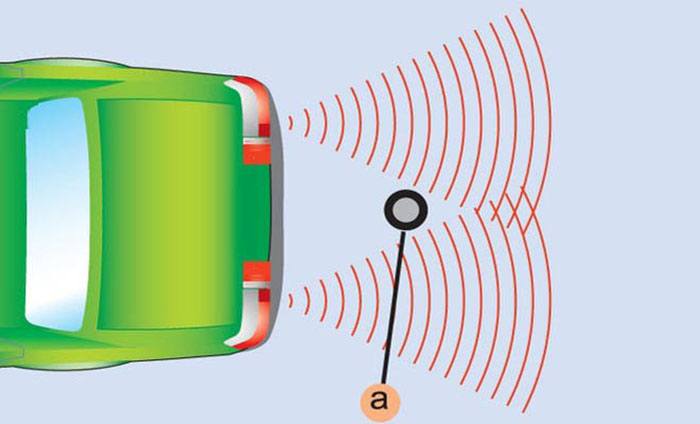
Ультразвуковой датчик генерирует высокочастотные звуковые волны (обычно 40-70 кГц), неразличимые человеческим ухом. Электрический импульс от блока управления преобразуется пьезоэлементом в механические колебания, создавая акустический сигнал, который распространяется в воздухе со скоростью ≈340 м/с.
При столкновении с препятствием звуковая волна отражается. Жёсткие объекты (металл, бетон) отражают сигнал эффективнее мягких (ткань, снег). Часть отражённой энергии возвращается к датчику, где пьезокристалл преобразует её обратно в электрический сигнал. Чувствительный приёмник фиксирует этот эхо-сигнал.
Ключевые этапы обработки сигнала
- Измерение времени задержки: Блок управления вычисляет интервал между отправкой импульса и получением эха (Δt).
- Расчёт дистанции: Расстояние до объекта (d) определяется по формуле:
d = (v × Δt) / 2,
где v – скорость звука, коэффициент 2 учитывает двойной путь сигнала (к объекту и обратно). - Фильтрация помех: Алгоритмы игнорируют слабые сигналы и посторонние шумы для минимизации ложных срабатываний.
| Параметр | Значение | Влияние на работу |
|---|---|---|
| Диапазон частот | 40-70 кГц | Определяет точность и угол охвата |
| Угол излучения | 70°-90° | Зависит от размера мембраны датчика |
| Минимальная дистанция | 10-30 см | Обусловлена временем затухания колебаний |
| Погрешность измерения | ±1-3 см | Зависит от температуры воздуха и влажности |
На точность измерений влияют атмосферные условия: скорость звука меняется при колебаниях температуры и влажности. Современные системы компенсируют это через температурные датчики, корректируя расчётную скорость распространения волн.
Как датчик излучает звуковой сигнал
Датчик парктроника генерирует ультразвуковые волны через пьезоэлектрический элемент. При подаче электрического напряжения от блока управления кристаллическая структура пьезоэлемента резко деформируется, создавая механические колебания. Эти колебания преобразуются в направленные звуковые волны частотой 40-70 кГц, не воспринимаемые человеческим ухом.
Электронный блок формирует короткие импульсы напряжения длительностью 0.1-1 мс с четкими интервалами между излучениями. Пьезоэлемент работает в режиме резонанса, что обеспечивает максимальную амплитуду колебаний и эффективное преобразование электрической энергии в акустическую. Корпус датчика фокусирует волны в узкий луч для точного сканирования пространства.
- Генерация импульса: блок управления подает напряжение на контакты датчика
- Деформация кристалла: пьезоэлемент сжимается/расширяется под действием тока
- Создание колебаний: механические вибрации передаются мембране датчика
- Излучение волн: мембрана взаимодействует с воздухом, генерируя ультразвуковой фронт
Процесс отражения звука от препятствия
Ультразвуковой датчик парктроника генерирует высокочастотный звуковой импульс (обычно 40-70 кГц), направленный в сторону потенциального препятствия. Этот импульс распространяется в воздухе со скоростью звука (~340 м/с), формируя акустическую волну.
При достижении физического объекта звуковая волна сталкивается с его поверхностью. Часть энергии волны поглощается материалом препятствия, а оставшаяся часть отражается обратно в виде эха. Интенсивность отраженного сигнала зависит от:
- Угла встречи волны с поверхностью: Максимальное отражение происходит при перпендикулярном ударе.
- Коэффициента отражения материала: Твердые гладкие поверхности (металл, бетон) отражают лучше, чем мягкие (ткань, снег).
- Расстояния до объекта: Сигнал ослабевает с увеличением дистанции.
Отраженная волна возвращается к датчику, где ее улавливает чувствительный микрофон-приемник. Электронный блок парктроника фиксирует временной интервал между моментом излучения импульса и моментом приема эха. На основе известной скорости звука система вычисляет расстояние по формуле:
| Расстояние до объекта (м) | = | (Скорость звука (м/с) × Время задержки (с)) / 2 |
Деление на 2 учитывает двойной путь волны (до препятствия и обратно). Полученные данные обрабатываются, и система предупреждает водителя звуковыми сигналами или визуальной индикацией, пропорциональной дистанции.
Как датчик принимает отраженную волну
После излучения ультразвукового импульса датчик автоматически переключается в режим приёма. В этом состоянии пьезоэлектрический элемент внутри датчика прекращает вибрацию и начинает ожидать возвращение акустического сигнала, отражённого от препятствия.
При столкновении звуковой волны с преградой часть её энергии возвращается к датчику. Пьезоэлемент реагирует на механическое давление отражённой волны, преобразуя его в слабый электрический сигнал. Этот процесс аналогичен обратному пьезоэффекту: кристалл генерирует напряжение пропорционально интенсивности полученных колебаний.
Ключевые этапы обработки сигнала
- Фильтрация помех: Электронный блок парктроника усиливает полученный сигнал и отсекает посторонние шумы (ветер, дождь, другие звуковые источники) с помощью частотных фильтров.
- Расчёт времени задержки: Контроллер измеряет интервал между моментом отправки импульса и получением эха по формуле: Расстояние = (Скорость звука × Время задержки) / 2.
- Корректировка данных: Учитываются факторы, влияющие на скорость звука (температура воздуха, влажность), для повышения точности измерений.
| Параметр | Влияние на приём сигнала |
| Угол отражения | Наклонные поверхности могут отклонять волну мимо датчика |
| Коэффициент поглощения | Мягкие материалы (ткань, снег) гасят сигнал сильнее твёрдых |
| Дальность действия | Слабые сигналы от далёких объектов требуют высокой чувствительности приёмника |
Полученные данные передаются в центральный процессор, который сравнивает показания всех датчиков и формирует предупреждение для водителя.
Расчет расстояния по времени возврата сигнала
Парктроник определяет дистанцию до препятствия путем точного замера времени между отправкой ультразвукового импульса и получением отраженного эха. Датчик генерирует короткий акустический сигнал, который распространяется в воздухе со скоростью ≈340 м/с (при 20°C).
Электронный блок фиксирует временной интервал t от момента излучения до регистрации отраженного сигнала микропроцессором. Поскольку звук проходит двойное расстояние (до объекта и обратно), формула расчета выглядит следующим образом:
Формула и этапы вычисления
Расчет дистанции выполняется по алгоритму:
- Измерение времени задержки t (в секундах)
- Вычисление пройденного звуком пути: S = v × t, где v ≈ 340 м/с
- Определение реального расстояния до объекта: D = S / 2
Пример для t = 0.01 с:
S = 340 × 0.01 = 3.4 м
D = 3.4 / 2 = 1.7 м
| Время (мс) | Расстояние (см) |
|---|---|
| 3 | 51 |
| 6 | 102 |
| 15 | 255 |
Микропроцессор непрерывно обрабатывает эти данные, переводя расстояние в сигналы для водителя. Точность зависит от калибровки скорости звука с учетом температуры воздуха.
Типичные места установки датчиков на бампере
Датчики парктроника монтируются в передний и задний бамперы автомобиля для контроля препятствий со всех сторон. Их расположение строго регламентировано производителем для обеспечения максимальной точности измерений и минимизации "мертвых зон".
Количество датчиков варьируется от 2 до 8 в зависимости от модели системы и габаритов транспортного средства. Наиболее распространены комплекты с 4 сенсорами на заднем бампере и 4 – на переднем.
Стандартная схема установки
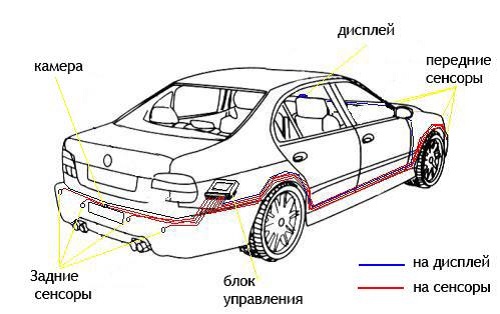
- Задний бампер: 4 датчика равномерно по всей длине на высоте 45-65 см от дороги
- Передний бампер: 2-4 датчика в нижней части, обычно ближе к углам
- Боковые датчики: Дополнительные сенсоры в передних/задних крыльях для контроля диагональных объектов
| Зона бампера | Количество датчиков | Особенности |
|---|---|---|
| Центральная часть (зад) | 2-3 | Обязательны для базового обнаружения |
| Угловые зоны | По 1 с каждой стороны | Критичны для парковки в стесненных условиях |
| Нижний край (перед) | 2-4 | Защита от бордюров и низких препятствий |
Важно: Сенсоры всегда устанавливаются на ровных участках бампера без выраженного рельефа. Минимальное расстояние между датчиками составляет 30-40 см для предотвражения взаимных помех. При монтаже обязательно учитывается зона покрытия каждого сенсора для создания сплошного поля обнаружения.
Различие между задними и передними парктрониками

Основное отличие заключается в автоматизации активации. Задние парктроники включаются автоматически при переводе КПП в режим заднего хода, тогда как передние обычно требуют ручного включения кнопкой или активируются только при движении на низкой скорости (до 15-20 км/ч). Это связано с тем, что задний ход используется преимущественно для парковки, а передние датчики могут ложно срабатывать в пробках или на светофорах.
Расположение и количество датчиков также различаются. Задние комплекты чаще оснащаются 4 датчиками из-за более высоких рисков столкновения при маневрировании. Передние системы могут иметь 2-4 сенсора, причем их устанавливают ниже бампера для контроля бордюров и низких препятствий. Калибровка передних парктроников сложнее из-за необходимости игнорировать движущиеся объекты вроде пешеходов.
| Критерий | Задние парктроники | Передние парктроники |
|---|---|---|
| Активация | Автоматическая (при включении задней передачи) | Ручная/ограниченная по скорости |
| Типовое количество датчиков | 4 | 2-4 |
| Главная функция | Контроль слепых зон при парковке | Предотвращение наезда на бордюры/низкие объекты |
| Особенности работы | Звуковое оповещение при приближении к препятствию | Часто интегрируются с системой автоматического торможения |
Дополнительные различия:
- Приоритет оповещения: сигналы задних датчиков обычно громче
- Задержка отключения: передние системы могут деактивироваться с задержкой после остановки
- Зоны покрытия: задние контролируют узкий сектор (120°), передние – до 180°
Варианты звукового оповещения о препятствии
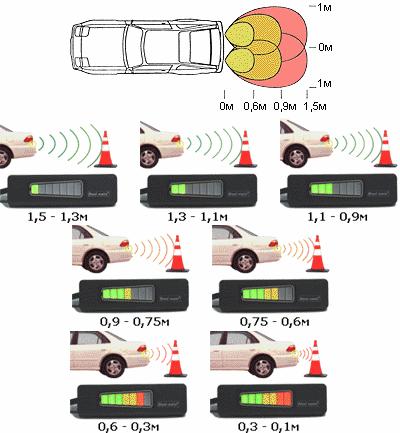
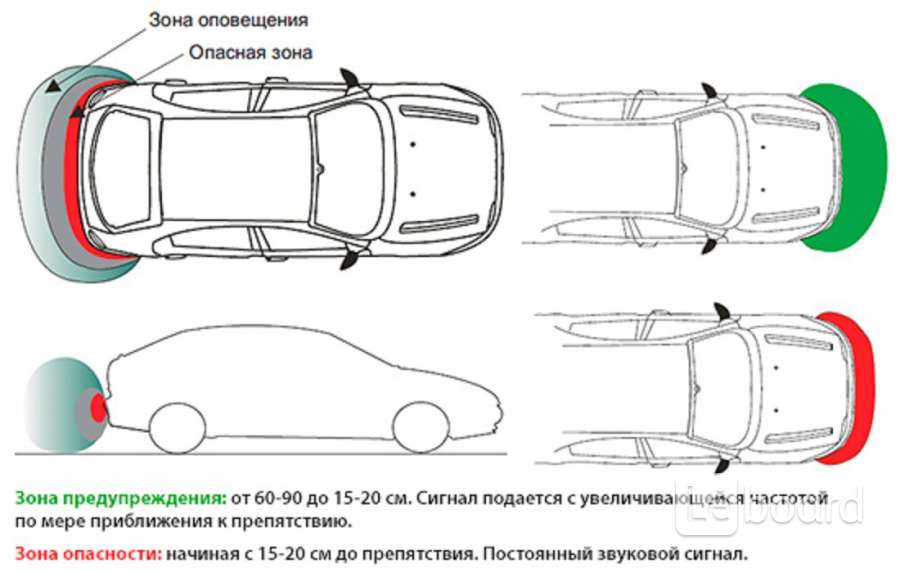
Парктроник генерирует звуковые сигналы, частота и интенсивность которых изменяются пропорционально дистанции до обнаруженного объекта. Чем ближе автомобиль к препятствию, тем короче становятся паузы между сигналами и выше их тональность.
При критически малом расстоянии (обычно менее 30 см) сигнал переходит в непрерывный монотонный звук, предупреждая о непосредственной опасности столкновения. Этот порог срабатывания может регулироваться в зависимости от модели устройства.
Типы звукового предупреждения
- Пилотные сигналы: Одиночные короткие звуки при обнаружении объекта на дальней дистанции (1,5–2 метра).
- Прерывистый режим: Серии учащающихся сигналов по мере приближения (например, бип-бип → бип-бип-бип → бибибип).
- Непрерывный тон: Постоянный высокочастотный звук при опасном сближении (менее 0,3–0,4 метра).
- Многотональные оповещения: Смена тональности для разных секторов (например, высокий тон для задних датчиков, низкий – для передних).
- Голосовые предупреждения: Проговаривание расстояния в метрах/сантиметрах или указание локации ("Сзади 50 см", "Спереди стоп").
Изменение частоты звукового сигнала
При приближении к препятствию парктроник увеличивает частоту звукового сигнала. Чем меньше расстояние до объекта, тем выше становится тональность звукового предупреждения. Эта градация позволяет водителю интуитивно оценивать дистанцию без необходимости смотреть на индикатор.
Некоторые системы дополнительно изменяют длительность интервалов между сигналами: на большом расстоянии звук прерывистый с паузами, при критическом сближении паузы исчезают, формируя непрерывный высокочастотный звук. Данный принцип основан на психоакустике – человеческое ухо четче различает изменения высоты тона, чем абсолютные значения расстояния.
Зависимость сигнала от дистанции
- 1.5–1.0 метра: Низкочастотные сигналы с интервалом 0.8–1.2 сек
- 0.9–0.5 метра: Средняя тональность, интервалы 0.4–0.6 сек
- 0.4–0.3 метра: Высокочастотные "бипы", интервалы 0.2–0.3 сек
- Менее 0.3 метра: Непрерывный пронзительный сигнал
Важно: Пороги срабатывания и характер звука варьируются в зависимости от модели и настроек парктроника. Водитель распознает опасность не по абсолютной частоте, а по динамике её изменения при движении автомобиля.
Принцип работы визуального дисплея парктроника
Визуальный дисплей парктроника получает обработанные сигналы от электронного блока управления, преобразуя данные о расстоянии до препятствий в понятную графическую или символьную информацию. Он синхронизируется с ультразвуковыми датчиками, отображая дистанцию в реальном времени по мере приближения транспортного средства к объектам.
Основные типы дисплеев используют цветовую сегментацию и зонирование: зелёный сектор указывает на безопасную дистанцию (обычно >1.5 метра), жёлтый – предупреждение о сокращении промежутка (0.8-1.5 метра), красный – критическое сближение (<0.8 метра). Дополнительно отображается графическая схема расположения препятствий относительно бампера.
Ключевые элементы визуализации
- Светодиодные шкалы: Сегменты загораются/гаснут пропорционально расстоянию
- ЖК-экраны: Отображают цифровое значение дистанции (например: "1.2 м")
- Схематическая проекция авто: Графическая модель машины с подсвечиваемыми зонами риска
| Цвет индикации | Дистанция | Тип оповещения |
|---|---|---|
| Зелёный | >1.5 м | Прерывистый звук/статичная подсветка |
| Жёлтый | 0.8-1.5 м | Учащённые звуковые сигналы |
| Красный | <0.8 м | Непрерывный звук/мигание |
Интерпретация индикаторов на графическом дисплее

Графический дисплей парктроника визуализирует дистанцию до препятствий через сегментные или точечные индикаторы, синхронизированные с ультразвуковыми датчиками. Каждая зона экрана соответствует конкретному сенсору: переднему, заднему или боковым. Приближение объекта активирует сегменты, меняющие цвет или яркость пропорционально сокращению расстояния.
Динамика индикации напрямую отражает скорость сближения с препятствием. Медленное заполнение сегментов сигнализирует о плавном движении, тогда как быстрое переключение в красную зону предупреждает о критической близости. Система дублирует визуальные сигналы звуковыми импульсами, учащающимися по мере уменьшения дистанции.
Типы индикаторов и их значение
- Цветовая градация: Зеленый (безопасно, >1.5 м), Желтый (осторожно, 0.5-1.5 м), Красный (опасно, <0.5 м)
- Мигающие сегменты: Обозначают объекты ближе 30 см, требуют немедленной остановки
- Статичная подсветка зоны: Указывает на непрерывно активный датчик в конкретном направлении
| Иконка автомобиля | Центральный элемент, относительно которого отображаются препятствия |
| Анимированные волны | Имитируют распространение УЗ-волн, подсвечивают траекторию обнаруженного объекта |
| Цифровое значение (в метрах) | Точная дистанция до ближайшего препятствия, выводится в углу экрана |
При одновременном срабатывании нескольких датчиков система выделяет зону наибольшей угрозы импульсной подсветкой. Ложные срабатывания (например, от дождя или грязи) распознаются по хаотичному мерцанию индикаторов без логической траектории движения.
Функция зонирования: определение боковых объектов
Функция зонирования в парктрониках обеспечивает разделение пространства вокруг автомобиля на секторы для точного определения локации препятствий. При обнаружении объекта система анализирует данные с конкретных датчиков, чтобы выявить его положение относительно бортов транспортного средства. Это критически важно для предотвращения контакта с невидимыми в зеркалах элементами: столбами, бордюрами или припаркованными машинами.
Боковые датчики, расположенные на передних и задних крыльях, формируют узконаправленные зоны ответственности по бокам авто. При попадании препятствия в зону действия сенсора система вычисляет дистанцию и направление, активируя звуковые сигналы или визуальные индикаторы в соответствующем сегменте дисплея. Такое точечное оповещение позволяет водителю точно идентифицировать риск касания с объектом даже при сложном маневрировании в узких пространствах.
Ключевые аспекты работы бокового зонирования
- Узконаправленные сенсоры: Датчики излучают волны под углом, минимизируя перекрестные помехи между зонами.
- Сегментированная индикация: Светодиодная шкала или графический интерфейс отображают сторону угрозы (левый/правый борт).
- Динамическое оповещение: Частота звуковых сигналов учащается по мере сокращения дистанции до объекта.
- Фильтрация ложных срабатываний: Алгоритмы игнорируют движущиеся объекты (проезжающие машины) или мелкие статичные помехи (трава, снег).
Порог срабатывания минимальной дистанции
Порог срабатывания минимальной дистанции – это критически важный параметр парковочного радара, определяющий расстояние до препятствия, при котором система активирует звуковой и/или визуальный сигнал предупреждения водителя. Данное значение устанавливается производителем на основе инженерных расчетов и тестов, учитывающих габариты транспортного средства, инерционность тормозной системы, время реакции водителя и погрешности работы ультразвуковых датчиков. Обычно этот порог находится в диапазоне 20–40 сантиметров для задних парктроников и 30–60 сантиметров для передних.
Срабатывание происходит мгновенно при достижении или пересечении заданной дистанции: датчики непрерывно измеряют расстояние, передавая данные в электронный блок управления (ЭБУ). ЭБУ сравнивает полученные значения с пороговым минимумом и при его превышении:
- Активирует прерывистый звуковой сигнал, частота которого нарастает по мере приближения к препятствию.
- Выводит на дисплей цветовую индикацию (например, зеленый → желтый → красный) или графическое изображение зон риска.
Факторы, влияющие на точность порога срабатывания:
| Скорость движения ТС | На высоких скоростях система может игнорировать статичные объекты для предотвращения ложных срабатываний. |
| Тип препятствия | Тонкие столбы или наклонные поверхности могут быть обнаружены позже из-за рассеивания ультразвука. |
| Загрязнение датчиков | Снег, грязь или лед на сенсорах увеличивают фактический порог срабатывания. |
Важно помнить: парктроник не заменяет визуальный контроль! Сигнал указывает на предельно допустимую дистанцию, при которой необходимо немедленно остановить автомобиль во избежание столкновения.
Автоматическая активация при включении передачи
Автоматическая активация парктроника при переключении на заднюю передачу – ключевая функция для удобства и безопасности. Система интегрирована с электроникой трансмиссии автомобиля, что позволяет ей мгновенно запускаться без ручного вмешательства водителя. Принцип основан на считывании сигнала от датчиков положения селектора КПП или блока управления коробкой передач.
При включении заднего хода бортовой компьютер отправляет электрический импульс на контроллер парктроника, переводя его из режима ожидания в активное состояние. Одновременно активируется питание ультразвуковых датчиков, расположенных в заднем бампере. Система мгновенно начинает сканирование пространства с помощью высокочастотных волн, анализируя отраженные сигналы для вычисления расстояний до препятствий.
Особенности работы:
- Активация происходит исключительно при включении задней передачи (R) для стандартных систем
- В продвинутых моделях возможна автоматическая работа на передних передачах при скорости ниже 15-20 км/ч
- Деактивация осуществляется автоматически при:
- Переключении с задней передачи на нейтраль/драйв
- Превышении пороговой скорости движения
| Состояние КПП | Действие системы |
| Включение "R" (задний ход) | Автозапуск, активация датчиков и дисплея |
| Переключение на "D"/"N"/"P" | Немедленное отключение (кроме моделей с фронтальными сенсорами) |
Ручная активация/деактивация системы водителем
Несмотря на автоматическое включение при включении задней передачи, практически все современные парковочные радары предоставляют водителю возможность вручную управлять работой системы. Для этого на приборной панели, центральной консоли или рулевом колесе предусмотрена специальная кнопка, обычно обозначенная пиктограммой в виде буквы "P" и ультразвуковых волн или надписью "PARK".
Нажатие этой кнопки позволяет принудительно включить парктроник при движении вперед на малой скорости (например, в узких местах или при парковке "носок вперед"), что не происходит автоматически. Также кнопка служит для принудительного выключения системы, когда ее работа нежелательна или мешает водителю (например, в пробке, при движении по пересеченной местности с низкой растительностью или при буксировке прицепа). Обычно изменение состояния системы сопровождается звуковым сигналом и изменением индикации на кнопке или приборной панели.
Причины для ручной деактивации
- Движение в плотном потоке (пробка): Постоянные ложные срабатывания на соседние автомобили при медленном движении могут отвлекать водителя.
- Экстремальные условия: Сильный дождь, снегопад, град или густой туман могут вызывать ложные сигналы или мешать работе датчиков.
- Буксировка прицепа: Датчики будут "видеть" дышло или сам прицеп как постоянное препятствие.
- Езда по бездорожью: Низко свисающие ветки, высокая трава, кусты, грязь могут постоянно активировать датчики.
- Наличие посторонних предметов: Сильное загрязнение датчиков снегом, льдом или грязью.
- Личные предпочтения водителя: Некоторым водителям постоянный звуковой фон мешает.
Варианты размещения кнопки управления
| Расположение | Преимущества | Недостатки |
|---|---|---|
| Приборная панель (ряд с другими кнопками) | Легко найти, стандартное место | Может потребовать отвлечения взгляда от дороги |
| Центральная консоль (около КПП или мультимедиа) | Удобно дотянуться рукой | Может быть загорожена предметами |
| Рулевое колесо (на спицах) | Максимально быстрое и удобное управление без отрыва рук | Требует наличия мультируля, доступно не на всех моделях |
Важно помнить, что после принудительного выключения парктроника (особенно задних датчиков) система не включится автоматически при следующем включении задней передачи. Водитель обязан самостоятельно активировать систему кнопкой перед маневрами, требующими ее работы, чтобы избежать столкновения из-за ложного ощущения отсутствия препятствий.
Зависимость погрешности от скорости движения
При увеличении скорости транспортного средства точность парктроника существенно снижается. Это связано с ограниченной скоростью обработки сигналов ультразвуковыми датчиками: система физически не успевает корректно обрабатывать отраженные волны при быстром перемещении объекта относительно препятствий.
На высоких скоростях (выше 20-25 км/ч) возникает эффект "опоздания" данных: информация о дистанции перестаёт соответствовать реальному положению автомобиля в момент получения сигнала процессором. Дополнительным фактором погрешности становится изменение угла отражения ультразвуковых волн при движении под острыми углами к поверхности преграды.
Ключевые закономерности
Основные зависимости можно представить следующим образом:
| Скорость (км/ч) | Типичная погрешность | Риски |
|---|---|---|
| 0-5 | 1-3 см | Минимальные |
| 5-15 | 3-10 см | Возможны ложные срабатывания |
| 15-25 | 10-30 см | Опасность позднего оповещения |
| >25 | 30+ см | Система становится ненадёжной |
Дополнительные факторы влияния:
- Инерционность обработки: задержка между отправкой импульса и анализом эха (до 0,3 сек)
- Геометрия датчиков: боковые сенсоры теряют точность раньше передних/задних
- Тип препятствия: погрешность усиливается на наклонных или звукопоглощающих поверхностях
Для компенсации погрешностей современные системы используют прогнозирующие алгоритмы, экстраполирующие траекторию движения, однако их эффективность резко падает при резких манёврах или на скользком покрытии.
Объекты, плохо определяемые системами (тонкие, наклонные)
Тонкие вертикальные объекты (велосипедные спицы, арматура, столбики ограждений) часто остаются незамеченными из-за малой площади отражения ультразвуковых волн. Сигнал либо рассеивается в стороны, либо возвращается под углом, не попадая на приемные датчики. Особенно критично это при движении задним ходом на низких скоростях.
Наклонные поверхности (бордюры под острым углом, лежачие полицейские, пологие прицепы) отражают волны в сторону от датчиков. Парктроник рассчитывает расстояние до объектов, исходя из перпендикулярного отражения, поэтому наклонные плоскости либо не детектируются вовсе, либо показывают дистанцию с критической погрешностью.
Основные проблемы при детекции
- Тонкие цилиндры (Ø менее 5 см): трубы, столбы, тросы
- Узкие перекладины: велосипедные рамы, горизонтальные штанги
- Пологие наклоны: пандусы (угол ≤ 20°), пологие грузовики
- Сетчатые конструкции: ограждения из цепей, строительные сетки
| Тип объекта | Причина пропуска | Риск при парковке |
| Каменный бордюр (45°) | Рассеивание сигнала вверх | Повреждение бампера |
| Вертикальный трос | Минимальная площадь отражения | Царапины на кузове |
Решение части проблем обеспечивают системы с увеличенным количеством датчиков (6-8 вместо стандартных 4) и комбинированные технологии (ультразвук + камеры). Однако даже продвинутые модели могут не распознать мокрые металлические предметы из-за полного отражения сигнала от гладкой поверхности.
Слепые зоны у стандартных парковочных радаров
Стандартные парковочные радары (парктроники) обладают ограниченным углом обзора, что неизбежно формирует "слепые зоны" вокруг автомобиля. Эти зоны представляют собой участки пространства, которые датчики не способны обнаружить из-за физических особенностей их работы и расположения на кузове. Наиболее критичные области находятся в непосредственной близости от бамперов, а также на высоте ниже 30-40 см от земли, где ультразвуковые волны теряют эффективность.
Ключевая проблема слепых зон – их непредсказуемость для водителя. Радар может не распознать вертикально расположенные объекты (например, тонкие столбики, цепи или торчащие арматурные прутья), низко висящие препятствия (бордюры, высокие пороги) или предметы сложной формы (велосипеды, детские игрушки). Особенно опасны динамические объекты, такие как внезапно выбегающие дети или животные, которые попадают в мертвую зону при маневрировании.
Основные причины возникновения слепых зон

- Физические ограничения датчиков: Ультразвуковые сенсоры излучают сигнал в форме конуса шириной 70-120°. Зоны между конусами соседних датчиков и пространство непосредственно под бампером остаются непокрытыми.
- Низкое размещение: Датчики монтируются на бамперах на высоте 45-60 см, что оставляет неконтролируемой область у земли (например, лежачие полицейские или глубокие выбоины).
- Отражение сигналов: Мягкие или поглощающие материалы (ткань, снег, листва), а также острые углы препятствий могут отражать волны мимо сенсоров.
| Тип слепой зоны | Расположение | Риски |
|---|---|---|
| Боковые "карманы" | Между крайними датчиками и углами бампера | Столкновение с столбами, дверьми соседних авто |
| Центральная нижняя | Под центральной частью бампера | Повреждение выхлопной системы, днища |
| Вертикальная | Выше уровня датчиков | Контакты с козырьками навесов, низкими ветвями |
Для частичной компенсации этих недостатков производители применяют дополнительные боковые датчики или камеры кругового обзора. Тем не менее, водителям рекомендуется всегда дублировать электронику визуальным контролем, особенно при парковке в стесненных условиях. Современные системы с радарными модулями 360° и искусственным интеллектом постепенно уменьшают проблему, но полностью исключить слепые зоны в бюджетных решениях пока невозможно.
Влияние загрязнения датчиков на точность работы
Загрязнение сенсоров (пыль, грязь, снег, лед) создаёт физический барьер для ультразвуковых волн. Это приводит к поглощению или искажению сигнала, нарушая основной принцип работы парктроника: излучение импульса и точный приём его отражения от препятствия. Датчик либо не получает обратный сигнал, либо фиксирует его с критической задержкой.
Последствия проявляются в ложных срабатываниях системы (ложная тревога при чистой зоне) или, что опаснее, в полном пропуске реальных препятствий. Особенно критично загрязнение зимой: налипший снег или лёд часто полностью "глушат" датчики, делая систему бесполезной до очистки.
Типичные сценарии сбоев из-за загрязнения
- Ложное обнаружение препятствий: Грязь/капли на сенсоре воспринимаются системой как близкий объект.
- Слепая зона: Толстый слой грязи или льда блокирует сигнал, препятствие не определяется.
- Неправильный расчёт дистанции: Ослабленный или искажённый сигнал возвращается с опозданием, показывая препятствие дальше, чем в реальности.
- Постоянный звуковой сигнал: Система интерпретирует загрязнение как критически близкое непрерывное препятствие.
| Тип загрязнения | Влияние на точность | Риск для водителя |
|---|---|---|
| Тонкий слой пыли/грязи | Незначительное снижение дальности обнаружения | Низкий |
| Плотная грязь, слякоть | Ложные срабатывания, "слепые" зоны | Средний |
| Снег, лёд | Полный отказ датчиков | Высокий |
Реакция системы на нестационарные препятствия
Парктроники сталкиваются с существенными сложностями при обнаружении динамически перемещающихся объектов из-за принципа работы ультразвуковых сенсоров. Датчики излучают короткие импульсы и измеряют время возвращения отраженного сигнала, что эффективно для статичных предметов с предсказуемой дистанцией. Нестационарные препятствия (пешеходы, животные, движущиеся транспортные средства) постоянно меняют координаты между отправкой импульса и получением эха, приводя к запаздыванию данных о позиции.
Система обрабатывает такие объекты через алгоритмы прогнозирования траектории и фильтрации ложных срабатываний. Микропроцессор анализирует последовательные замеры расстояния, вычисляя вектор перемещения препятствия. Если скорость изменения дистанции превышает пороговое значение (например, 5-10 км/ч), парктроник интерпретирует объект как движущийся и корректирует предупреждения. Однако резкие изменения траектории (внезапный выход из-за угла) могут вызвать задержку оповещения на 0.3-0.8 секунд.
Особенности обработки динамических объектов
Ключевые ограничения и адаптивные механизмы:
- Частота сканирования: Стандартные 20-40 импульсов/сек недостаточны для точного трекинга быстро перемещающихся целей
- Компенсация задержек: Алгоритмы экстраполяции предсказывают позицию объекта на момент активации звукового сигнала
- Приоритетность оповещений: Система усиливает сигнал (непрерывный писк/красная зона на дисплее) при сокращении дистанции до движущегося объекта
Сравнение эффективности в различных условиях:
| Тип препятствия | Скорость приближения | Точность обнаружения |
|---|---|---|
| Пешеход (3-5 км/ч) | Низкая | До 90% |
| Велосипедист (15-20 км/ч) | Средняя | 70-80% |
| Автомобиль (30+ км/ч) | Высокая | 40-60% |
Важно: Современные системы интегрируют данные с камер и радаров миллиметрового диапазона для улучшения реакции на динамические объекты, но базовые ультразвуковые парктроники остаются уязвимы к резким маневрам вблизи автомобиля.
Комбинация парктроника с камерой заднего вида
Парктроник, несмотря на свою точность в определении расстояний до препятствий, не предоставляет визуальной информации об окружающем пространстве. Камера заднего вида решает эту проблему, транслируя на экран в салоне реальное изображение зоны позади автомобиля, включая объекты, невидимые в зеркала или находящиеся вне зоны действия ультразвуковых датчиков.
Совместная работа этих систем создает комплексное решение: парктроник вычисляет дистанцию до объектов с помощью ультразвуковых волн и подает звуковые сигналы, а камера дополняет данные визуализацией. Информация с обоих устройств синхронизируется и выводится на мультимедийный дисплей, часто с наложением цветных линий разметки (статической или динамической), указывающих траекторию движения и безопасные зоны.
Ключевые преимущества интеграции
- Повышенная точность позиционирования: Визуальный контроль помогает идентифицировать низкие (бордюры, тонкие столбики) или нависающие (ветки, козырьки) препятствия, которые парктроник может не обнаружить.
- Уменьшение "слепых зон": Широкоугольная камера охватывает области, недоступные для датчиков парктроника и зеркал заднего вида.
- Интуитивное восприятие: Звуковая сигнализация парктроника (прерывистая или непрерывная) дополняется визуальными подсказками на экране (разметка, предупреждающие иконки), упрощая оценку обстановки.
| Функция | Парктроник | Камера | Синергия систем |
|---|---|---|---|
| Обнаружение объектов | Дистанция до препятствий (в метрах) | Визуальная идентификация формы и типа объекта | Точное определение что находится сзади и на каком расстоянии |
| Работа в условиях | Эффективен в темноте, тумане, при ярком солнце | Зависит от освещенности и чистоты объектива | Компенсация ограничений одной системы возможностями другой |
Автоматическое переключение на изображение с камеры при включении задней передачи и одновременная активация парктроника обеспечивают мгновенную готовность системы. Динамическая разметка на экране, синхронизированная с поворотом руля, прогнозирует траекторию движения, а датчики парктроника в реальном времени подсвечивают сектора приближения к препятствиям, создавая интерактивную среду для безопасного маневрирования.
Базовые требования к энергоснабжению системы
Стабильное электропитание критически важно для корректной работы парктроника, так как система использует электронные сенсоры, процессор обработки сигналов и устройства оповещения. Нарушения в подаче энергии могут вызвать ложные срабатывания, задержки в определении препятствий или полный отказ системы.
Парктроник подключается к бортовой сети автомобиля, которая подвержена колебаниям напряжения при запуске двигателя, работе генератора и подключении дополнительных потребителей. Некачественное питание способно повредить чувствительные компоненты системы, особенно в условиях вибрации и перепадов температур.
Ключевые параметры электропитания:

- Номинальное напряжение: 12 В ±10% (для легковых автомобилей), соответствие штатной сети транспортного средства
- Защита от переполюсовки: встроенные диодные барьеры или предохранители для предотвращения повреждений при ошибочном подключении
- Фильтрация помех: подавление высокочастотных пульсаций от генератора и зажигания через LC-фильтры
- Устойчивость к провалам: сохранение работоспособности при кратковременных падениях напряжения до 9 В во время старта двигателя
- Энергоэффективность: ток потребления в режиме ожидания не более 10-15 мА для исключения разряда АКБ при длительной стоянке
Самотестирование парктроника при запуске двигателя
При включении зажигания или запуске двигателя парктроник автоматически инициирует процедуру самотестирования. Это встроенная функция, предназначенная для мгновенной проверки работоспособности ключевых компонентов системы перед началом эксплуатации.
Процесс длится доли секунды и включает последовательную диагностику всех ультразвуковых датчиков, целостность их соединений с электронным блоком управления (ЭБУ), исправность звукового излучателя (зуммера) и корректность работы светового индикатора (если он присутствует). Система посылает тестовые импульсы через каждый датчик и анализирует отклик.
Принцип работы самотестирования
- Проверка датчиков: ЭБУ определяет наличие физических повреждений, обрыв проводов или короткое замыкание путем измерения сопротивления и анализа сигналов.
- Диагностика звукового сигнала: Генерируется короткий тестовый "пик" зуммера для подтверждения его работоспособности.
- Верификация индикации: Активируются все сегменты светового дисплея (или контрольные лампы) для проверки их исправности.
Если все компоненты функционируют нормально, система переходит в дежурный режим без дополнительных оповещений. При обнаружении неисправности парктроник сигнализирует об этом водителю:
- Периодическим прерывистым звуковым сигналом (обычно при попытке включения передачи заднего хода).
- Миганием светового индикатора на дисплее или приборной панели (конкретный вид сигнала зависит от модели).
Такая диагностика исключает использование неработоспособной системы и позволяет своевременно выявить проблемы, например, загрязнение или обледенение датчиков, которые могут блокировать их работу.
Когда парктроник может выдать ложное срабатывание
Ложные срабатывания парктроника возникают из-за особенностей работы ультразвуковых датчиков, которые могут интерпретировать неопасные объекты или условия среды как препятствия. Это приводит к необоснованным звуковым и световым сигналам, отвлекающим водителя.
Основные факторы, провоцирующие ложные сигналы:
Распространённые причины ложных предупреждений
- Мелкие или подвижные объекты: Листья, ветки, капли дождя, снег или мелкие животные в зоне действия датчиков.
- Погодные условия: Сильный дождь, снегопад, туман или ледяная корка на датчиках искажают ультразвуковые волны.
- Загрязнения: Грязь, пыль или налипший снег блокируют излучатели/приёмники датчиков.
- Рельеф поверхности: Крутые въезды, неровности асфальта или острые углы бордюров отражают сигнал под неверным углом.
- Акустические помехи: Шум работающей мототехники рядом, сильный ветер или звуковые волны от других устройств.
Пример критичных ситуаций: Сигнал может сработать при парковке у стены с вентиляционной решёткой (из-за сложной структуры поверхности) или в зимний период при обледенении парковочных сенсоров.
Список источников
При подготовке материала о парктрониках использовались специализированные технические ресурсы и профильные издания. Основное внимание уделялось принципам работы ультразвуковых датчиков и системам автомобильной безопасности.
Следующие источники содержат детальную информацию о конструкции, алгоритмах обработки сигналов и практическом применении парковочных радаров:
- Автомобильная электроника: учебное пособие / И.П. Петров. – М.: Техносфера, 2020. Глава 5.
- Техническая документация Bosch Parking Systems (серия ParkPilot).
- Научная статья "Алгоритмы обработки сигналов ультразвуковых парктроников" // Журнал "Автомобильная промышленность", №3, 2022.
- Эксплуатационное руководство Valeo Parking Assistance.
- Отраслевой стандарт ГОСТ Р 41.45-2007 "Единообразные предписания, касающиеся парковочных систем".
- Материалы международной конференции "Современные автомобильные сенсорные системы" (2023).