Электромагнитная подвеска авто - устройство, работа, плюсы
Статья обновлена: 01.03.2026
Традиционные механические подвески десятилетиями определяли комфорт и управляемость автомобилей, но развитие технологий привело к появлению революционных решений. Электромагнитная подвеска кардинально меняет подход к демпфированию, обещая беспрецедентную адаптивность и плавность хода. Эта инновационная система использует силу магнитных полей вместо гидравлики или газов, открывая водителю новые возможности управления.
В статье подробно рассматривается устройство, принцип работы и ключевые преимущества такого типа подвесок перед классическими аналогами. Исследуется, как управляемые алгоритмами магнитно-реологические демпферы реализуют ранее недостижимую скорость реакции на дорожные неровности. Особое внимание уделяется практическим выгодам технологии: от повышения курсовой устойчивости до снижения кренов при маневрировании.
История разработки первых активных подвесок с электромагнитами

Эксперименты с активными подвесками начались в 1950-х годах: американская компания General Motors тестировала системы с гидравлическими приводами, но их инерционность и медленный отклик ограничивали эффективность. Идея замены жидкости на электромагниты возникла в 1980-х, когда развитие силовой электроники позволило управлять мощными магнитными полями в реальном времени. Первые прототипы электромагнитных подвесок использовали громоздкие электромагниты и требовали огромных энергозатрат, что делало их непрактичными для серийных автомобилей.
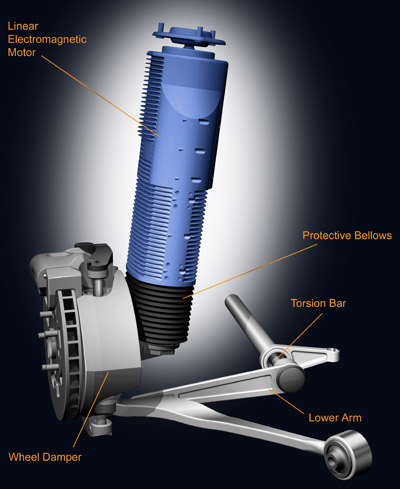
Прорыв произошёл в конце 1990-х: корпорация Bose представила демонстрационную модель на основе линейных электродвигателей, где датчики отслеживали неровности дороги, а алгоритмы мгновенно регулировали усилие на каждом колесе. Система обеспечивала беспрецедентную плавность хода, но её стоимость превышала $20 000 и вес увеличивался на 400 кг. В 2009-м Mercedes-Benz интегрировал MAGNETIC RIDE от Delphi в S-Klasse (F700), используя компактные электромагнитные клапаны в амортизаторах с ферромагнитной жидкостью. Это позволило сократить задержки реакции до 1 мс, открыв путь к коммерческому применению.
Ключевые этапы эволюции

- 1999: Honda разрабатывает первую электромагнитную подвеску для мотоцикла, сократив вес системы на 40%.
- 2002: Запуск серийного Cadillac Seville с амортизаторами MagneRide от General Motors – первый массовый автомобиль с адаптивной электромагнитной регулировкой.
- 2012: Audi внедряет систему на электромагнитах в R18 e-tron quattro для гонок «24 часа Ле-Мана», доказав её надёжность в экстремальных условиях.
| Технологический барьер | Решение |
|---|---|
| Высокое энергопотребление | Внедрение рекуперативных систем на основе обратной ЭДС (с 2015 г.) |
| Цена компонентов | Использование гибридных систем (электромагниты + пневматика, Mercedes ABC) |
Ключевые производители современных электромагнитных систем
Крупные автокомпонентные концерны играют ведущую роль в разработке промышленных решений для активных подвесок, инвестируя значительные средства в НИОКР и сотрудничая с автопроизводителями. Их инженерные команды фокусируются на оптимизации производительности, энергоэффективности и интеграции систем с бортовой электроникой транспортных средств.
Специфические технологические стартапы концентрируются на инновационных подходах к электромагнитной подвеске, нередко создавая прототипы с усиленной обратной связью или уникальными алгоритмами адаптации. Среди производителей наблюдается стратегическое разделение: одни ориентированы на массовый OEM-сегмент, другие – на премиальный и экспериментальный рынки.
- Continental AG – предлагает SCALA-системы с алгортимами предсказания дорожного покрытия через камеры и датчики.
- ZF Friedrichshafen – интегрирует электромагнитные модули в шасси премиальных брендов вроде Porsche и Maserati.
- ClearMotion (США) – разрабатывает платформу с линейными двигателями и алгоритмом на базе ИИ для реакции за 3 мс.
- Bose Corporation – владеет патентами на оригинальные электродинамические подвески с высокочастотной адаптацией (проект 1980-2000х).
- Tianrun New Energy Technology (Китай) – продвигает бюджетные решения для городского электротранспорта с упрощённой конструкцией.
Конструкция традиционной стойки Макферсон для сравнения
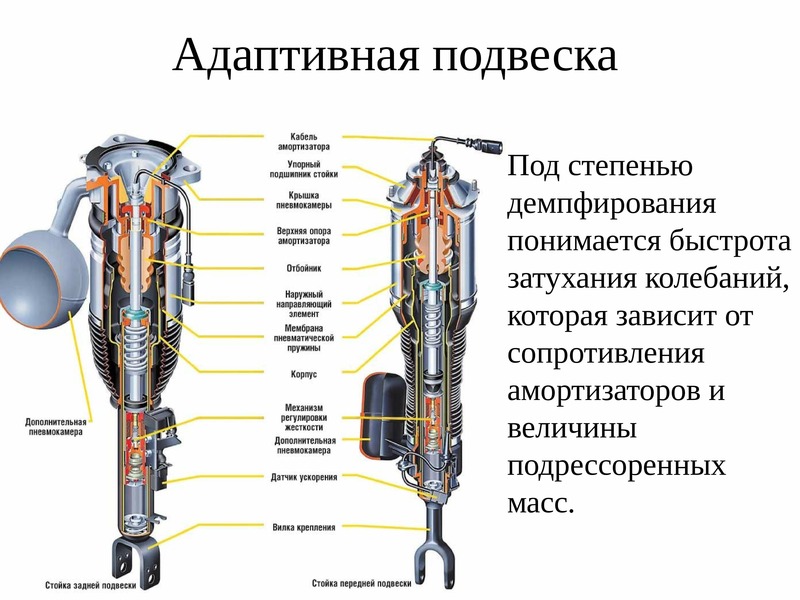
Традиционная стойка Макферсон объединяет упругий элемент, гасящее устройство и направляющий механизм в едином компактном агрегате. Её основу составляет цилиндрический амортизатор, заключённый внутри витой пружины. Шток амортизатора через верхнюю опору крепится к брызговику кузова, а корпус стойки болтовым соединением фиксируется к поворотному кулаку колеса.
Стальной поворотный кулак также соединён снизу с поперечным рычагом подвески. Этот рычаг обеспечивает геометрическую стабильность, воспринимая продольные и боковые усилия при разгоне, торможении и поворотах. Стабилизатор поперечной устойчивости, связывающий правую и левую стороны подвески через тяги, уменьшает крены кузова.
Ключевые элементы и их функции
| Элемент | Назначение |
|---|---|
| Винтовая пружина | Поглощение неровностей дороги и поддержание клиренса |
| Телескопический амортизатор | Демпфирование колебаний пружины |
| Поворотный кулак | Связующее звено между стойкой, рычагом и колесом |
| Нижний рычаг | Контроль траектории колеса и передача усилий |
| Стабилизатор поперечной устойчивости | Снижение кренов кузова повороте |
Принцип работы основан на сжатии пружины под нагрузкой и гашении возникающих колебаний гидравлическим амортизатором. Жёсткость и демпфирование фиксированы и подобраны под усреднённые условия эксплуатации. Реакция подвески на неровности определяется механическими свойствами компонентов без возможности адаптации.
Ограничения конструкции:
- Жёсткий компромисс между комфортом и устойчивостью
- Неизменные характеристики демпфирования
- Подрессоренные массы увеличены весом неразгруженной стойки
- Передача вибраций от дороги на кузов через верхнюю опору
Базовые элементы электромагнитной подвески
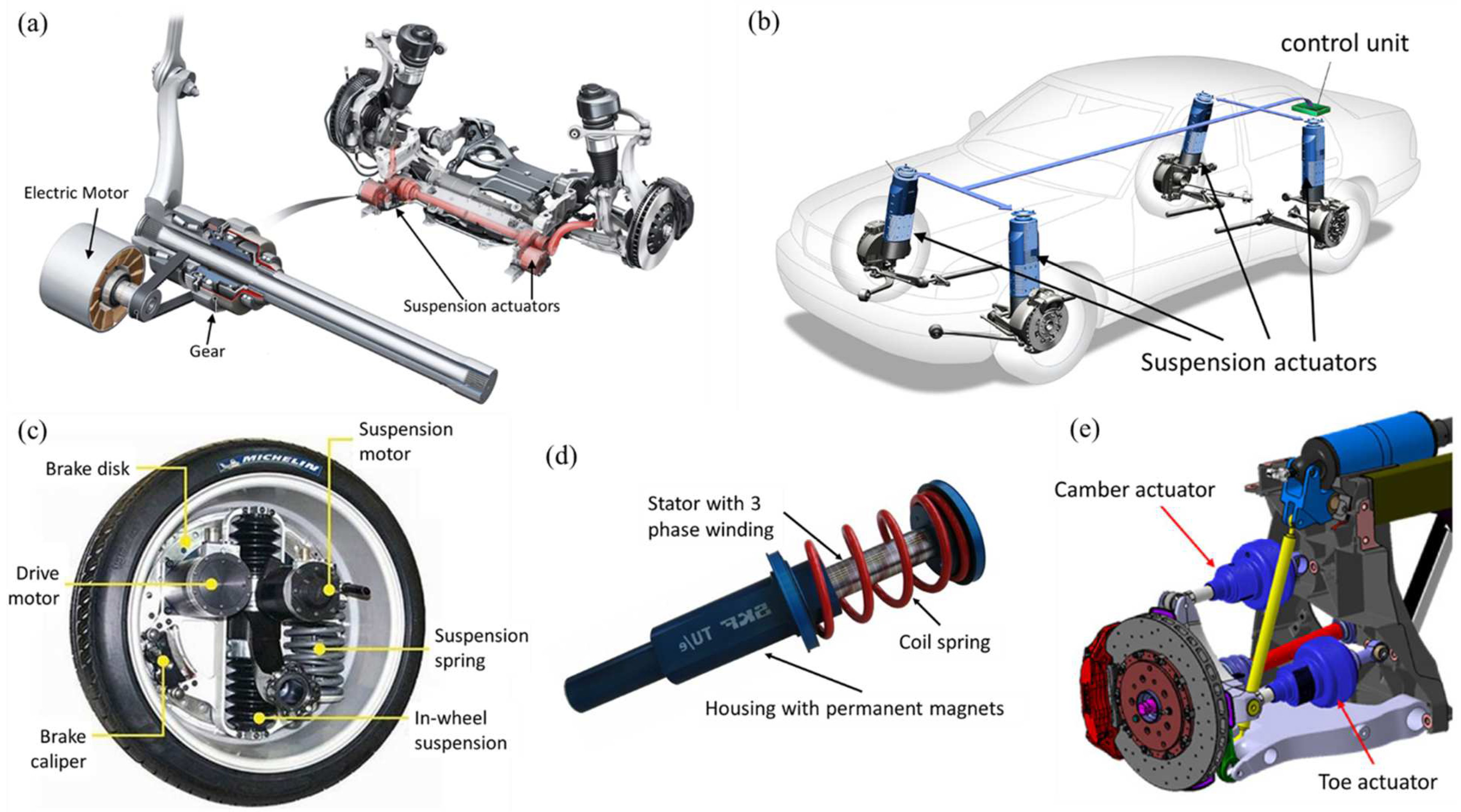
Основу конструкции составляют электромагнитные актуаторы, заменяющие традиционные пружины и амортизаторы. Каждый узел включает катушку индуктивности с сердечником, которая генерирует переменное магнитное поле для управления высотой кузова.
Система оснащена высокоточными датчиками ускорения, положения кузова и дорожного просвета. Эти сенсоры непрерывно фиксируют параметры движения колес относительно рамы и передают данные в управляющий модуль.
Ключевые компоненты системы
- Электромагнитные исполнительные механизмы: Устанавливаются попарно на каждое колесо, регулируют жесткость и клиренс.
- Блок управления (ECU): Анализирует сигналы датчиков и вычисляет корректирующие воздействия за 1-2 мс.
- Датчиковая группа:
- Акселерометры (контроль кренов/тангажа)
- Позиционные сенсоры (замер расстояния колесо-кузов)
- Детекторы неровностей дороги
- Мощный преобразователь: Трансформирует напряжение бортовой сети (12В) до 48-100В для питания актуаторов.
Роль электромагнитных катушек в конструкции амортизаторов
Электромагнитные катушки интегрированы в корпус амортизатора вместо традиционных гидравлических клапанов или механических пружин. Они выполнены из токопроводящей проволоки, намотанной вокруг ферромагнитного сердечника, и располагаются попарно на каждом колесе транспортного средства. Подаваемый на катушки электрический ток генерирует управляемое магнитное поле переменной силы.
Взаимодействие магнитных полей от парных катушек создает силы притяжения или отталкивания, мгновенно изменяющие жесткость демпфирования в ответ на данные датчиков. Когда контроллер обнаруживает неровность, он перераспределяет ток в катушках, усиливая магнитное отталкивание для "приподнимания" кузова или ослабляя поле для плавного поглощения удара.
Ключевые функции в системе подвески
- Активное демпфирование: Катушки заменяют пассивные элементы, регулируя сопротивление перемещению подвески со скоростью до 1000 раз/сек.
- Точное позиционирование: Управляемая сила Лоренца между катушками позволяет изменять клиренс автомобиля и стабилизировать крен в поворотах.
- Обратная связь: Встроенные сенсоры в узле катушек передают данные о нагрузке и перемещениях в реальном времени для корректировки алгоритмов.
Материалы сердечников для эффективного управления магнитными полями
Ключевое требование к материалам магнитопроводов – обеспечение максимально быстрого и управляемого изменения магнитного потока при минимальных потерях энергии. Для этого используются материалы с высокой магнитной проницаемостью, минимальной коэрцитивной силой и низким электросопротивлением. Тонкие листы электротехнической стали и аморфные металлические сплавы демонстрируют лучшие показатели по вихретоковым потерям в переменных полях средней частоты.
Современные разработки активно применяют композитные структуры: порошковые сердечники из изолированных частиц железа или карбонильного железа, спечённые в диэлектрической матрице. Такая конструкция радикально снижает потери на вихревые токи даже на высоких частотах переключения (до 20 кГц), критичных для быстродействующего управления демпфированием. Дополнительно внедряются сердечники с градиентной структурой, где состав или толщина материала изменяется по сечению для локальной оптимизации свойств.
Критерии выбора материалов
- Динамический диапазон управления: Сплав должен сохранять линейную B-H характеристику в рабочих диапазонах индукции (до 1,5–1,8 Тл).
- Температурная стабильность: Минимальное изменение магнитных свойств при нагреве до 120–150°C (эксплуатационные температуры подвески).
- Механическая прочность: Устойчивость к вибрациям и ударным нагрузкам без деградации магнитных параметров.
| Материал | Достоинства | Недостатки |
|---|---|---|
| Аморфная сталь | Сверхнизкие гистерезисные потери, высокая проницаемость | Хрупкость, сложная обработка, высокая стоимость |
| Пермаллой (никель-железо) | Рекордная начальная проницаемость (>100 000), малая коэрцитивная сила | Низкая индукция насыщения (~0,8 Тл), чувствительность к механическим напряжениям |
| Порошковое железо | Нулевые вихретоковые потери, стабильность в широком частотном диапазоне | Сниженная проницаемость, высокий коэффициент температурного расширения |
Нанокристаллические сплавы (Fe-Cu-Nb-Si-B) становятся перспективной альтернативой, сочетая высокую индукцию насыщения (1,2 Тл), на порядок меньшие потери по сравнению с кремнистой сталью и повышенную температурную стабильность. Распределение воздушных зазоров в сердечнике оптимизируется для управления краевым эффектом полей и снижения магнитного сопротивления, что повышает КПД катушек индуктивности в силовой электронике системы подвески.
Электропроводящая жидкость в демпфирующих элементах
Магнитореологическая жидкость (МРЖ) представляет собой рабочий состав для активных демпфирующих элементов электромагнитной подвески. Она содержит микроскопические ферромагнитные частицы (часто на основе железа), коллоидно взвешенные в гидрокарбонатном или силиконовом синтетическом масле-носителе. В состоянии покоя частицы распределены хаотично, и жидкость обладает низкой вязкостью, обеспечивая плавность хода. При подаче электрического тока на соленоид, связанный с поршнем амортизатора, создается сильное магнитное поле в рабочем канале.
Это магнитное поле немедленно упорядочивает расположение ферромагнитных частиц, выстраивая их в цепочки или колонны поперек направления потока жидкости в канале поршня. Такое структурированное состояние резко возрастает вязкость и текучее сопротивление МРЖ, пропорционально силе приложенного поля, что создает противодействующее демпфирующее усилие. Электронный блок управления подвески, получающий данные от датчиков, регулирует ток в соленоиде для мгновенного изменения демпфирования по каждому колесу в реальном времени.
- Экстремальная скорость отклика: Изменение характеристик демпфирования происходит за миллисекунды, что существенно быстрее систем с клапанным регулированием или пневматических решений.
- Широчайший диапазон регулирования: Сила и, следовательно, демпфирующее усилие могут плавно меняться в очень широких пределах от практически нулевого сопротивления до максимально жесткого, недостижимого для пассивных амортизаторов.
- Высокая надежность: Отсутствие быстродействующих механических клапанов и уплотнений переменной пропускной способности повышает надежность узла.
- Простота конструкции элемента: Достижение сложного регулирования без применения сложной механики внутри амортизатора.
Сенсорная система: типы датчиков и их расположение
Система управления электромагнитной подвеской непрерывно отслеживает параметры движения кузова, колес и дорожного полотна с помощью сети высокоточных датчиков. Эти датчики формируют информационную основу для расчета необходимых корректирующих воздействий электромагнитными катушками в режиме реального времени.
Основными типами датчиков, задействованных в системе, являются акселерометры, датчики положения и вылета подвески. Акселерометры измеряют ускорения кузова по трем осям (вертикальной, продольной, поперечной) и крепятся к элементам рамы или подрамникам. Датчики положения (обычно бесконтактные, на основе эффекта Холла) контролируют угол поворота каждого колеса относительно кузова. Датчики вылета (индуктивные или ультразвуковые) фиксируют мгновенное расстояние между подвеской и кузовом, определяя величину хода амортизатора и сжатие пружины.
Типичное расположение датчиков в системе:
- Акселерометры кузова: Располагаются вблизи точек крепления подвесок (обычно 4 датчика) и в центре масс автомобиля (для измерения общих кренов/тангажа).
- Датчики положения колес: Устанавливаются на ступицах или рычагах подвески каждого колеса.
- Датчики вылета подвески: Интегрируются непосредственно в стойки амортизаторов либо монтируются параллельно им на рычагах.
- Датчик положения руля и педали газа/тормоза: Передают данные о действиях водителя (установлены на рулевой колонке и педальных узлах).
Дополнительные датчики могут включать гироскопы (для точного отслеживания угловых скоростей кузова) и лазерные сканеры или камеры, предвосхищающие неровности дороги. Сигналы со всех сенсоров обрабатываются центральным блоком управления, который оптимизирует силу тока в катушках для поддержания стабильности, плавности хода и сцепления с дорогой.
Блок управления подвеской: процессор и алгоритмы
Центральный процессор выступает нейронным центром системы, непрерывно обрабатывающим данные от сенсоров (акселерометров, датчиков пути, положения кузова, гироскопов) с частотой до 1000 раз в секунду. Он анализирует вертикальные ускорения колес и кузова, крен, тангаж, траекторию движения и дорожный просвет, формируя виртуальную модель поведения машины в реальном времени.
Сложные алгоритмы моментально вычисляют требуемое усилие для каждого электромагнитного амортизатора. Адаптивные программы балансируют противоречивые цели: комфорт (поглощение неровностей) и стабильность (контроль крена в поворотах, минимизация раскачки). Математические модели предсказывают развитие ситуации на основе текущей динамики, упреждая реакции подвески до контакта колеса с препятствием.
Ключевые аспекты работы процессора и алгоритмов
- Многоуровневая фильтрация сигналов: Отсев ложных срабатываний от помех, фокусировка на критичных для контроля параметрах.
- Режимы движения: Алгоритмы подстраивают жесткость и ход подвески под выбранный водителем стиль (комфорт/спорт) или условия (шоссе/бездорожье).
- Обратная связь: Корректировка усилия магнитов через миллисекунды после удара, предупреждение резонансных колебаний кузова.
| Тип алгоритма | Функция | Цель |
| Стабилизирующий | Подавление крена/нырка | Повышение курсовой устойчивости |
| Демпфирующий | Гашение высокочастотных вибраций | Снижение шума, усталости водителя |
| Предиктивный | Анализ данных камер/радаров | Адаптация к рельефу дороги до наезда на препятствие |
Электрические соединения и силовая проводка системы
Электромагнитная подвеска требует сложных электрических соединений между основными компонентами: электромагнитными катушками, блоком управления (ЭБУ), датчиками положения кузова и ускорения, а также силовым преобразователем. Каждый элемент соединяется экранированными кабелями для подавления электромагнитных помех и защиты сигналов от искажений. Силовая проводка, рассчитанная на высокие токи (до сотен ампер), напрямую связывает АКБ и преобразователь с катушками для быстрого изменения магнитного поля.
Особое внимание уделяется разъёмам IP67/69K, обеспечивающим защиту от влаги и вибрации. Сечение силовых проводов выбирается с запасом по току для предотвращения перегрева, а трассировка минимизирует длину петель, снижая индуктивные потери. Все соединения имеют многоуровневую диагностику для контроля обрывов, коррозии и перегрузок.
Ключевые особенности электропроводки:
- Многожильные проводники с термостойкой изоляцией, устойчивой к механическим повреждениям
- Двойное экранирование сигнальных линий (фольга + оплётка)
- Автоматические разъединители при аварии для обесточивания системы
- Цветовая маркировка для упрощения обслуживания
Основные требования к соединениям:
| Параметр | Значение |
|---|---|
| Рабочее напряжение | 48-400V DC |
| Максимальный ток (пиковый) | до 300A |
| Диапазон рабочих температур | -40°C до +125°C |
| Сопротивление изоляции | >100 МОм |
Исполнительные механизмы быстрого реагирования
Исполнительные механизмы современных электромагнитных подвесок представлены преимущественно линейными электродвигателями или соленоидными клапанами со скользящим якорем. Они напрямую преобразуют электрические сигналы от блока управления в управляемые механические усилия между кузовом и колесом. Изменяя силу тока в электромагнитных катушках за доли секунды, система генерирует точную компенсационную силу, нейтрализующую вертикальные колебания.
Ключевой особенностью является время отклика, не превышающее 5-15 мс, что обеспечивается высокочастотным управлением током (до 1000 Гц) и минимальной инерцией подвижных элементов. Токопроводящие катушки и магнитные сердечники проектируются с высокой магнитной проницаемостью, а конструкция исключает гидравлические компоненты, что устраняет задержки, характерные для традиционных амортизаторов.
- Минимальная инерция подвижных частей за счет отсутствия штоков, поршней, гидравлической жидкости
- Прямое силовое воздействие на элементы подвески без промежуточных преобразований энергии
- Безынерционная коррекция усилия в диапазоне 0.1–1.5 кН при изменении тока до 20 А
- Двунаправленная работа для сжатия/отбоя подвески за счет смены полярности поля
Аккумуляторные требования для стабильной работы системы
Электромагнитная подвеска потребляет значительную электрическую мощность для мгновенной коррекции положения колес и кузова, особенно при движении по неровностям. Источник питания должен обеспечивать стабильное высокое напряжение (обычно 48В) и ток до сотен ампер в пиковых режимах без просадок, способных нарушить работу электромагнитов.
Обеспечение бесперебойной подачи энергии критически зависит от характеристик аккумуляторной батареи. Для проектирования системы учитывают три ключевых параметра: емкость (А·ч) для поддержки длительной работы, максимальная токоотдача (С-рейтинг) для пиковых нагрузок и стабильность напряжения под высоким током. Как правило используются литий-ионные или конденсаторные модули.
- Высокая пиковая мощность: Аккумулятор обязан мгновенно отдавать ток 200-500А без критического падения напряжения.
- Низкий риск деградации: Цикличность высокотоковых нагрузок требует применения аккумуляторов с устойчивыми к перегрузкам химическими составами (например, LTO).
- Рабочий диапазон температур: Сохранение характеристик при -30°C до +65°C для всесезонной эксплуатации.
| Параметр | Минимальное требование | Рекомендуемое значение |
|---|---|---|
| Напряжение системы | 42В (в нагрузке) | 48В (номинал) |
| Токовая нагрузка (пик) | 200А | ≥350А (на группу магнитов) |
| Циклическая стойкость | 50 000 циклов | ≥100 000 циклов @ 80% DoD |
Дополнительные требования
Необходимы системы мониторинга: балансировка ячеек, контроль перегрева и защита от глубокого разряда. Для контроля скорости отклика интегрируется двухконтурная архитектура питания с буферными суперконденсаторами.
Физика изменения вязкости магнитной жидкости под напряжением
Магнитная жидкость содержит ферромагнитные наночастицы, взвешенные в несущей среде. При отсутствии напряжения частицы распределены хаотично, обеспечивая минимальную вязкость. При подаче электрического напряжения возникает поле, поляризующее частицы и выстраивающее их в цепочечные структуры вдоль силовых линий. Упорядочение микроструктуры создает сопротивление сдвигу, многократно повышая кажущуюся вязкость жидкости.
Физическая основа эффекта – конкуренция между тепловым движением частиц и энергией магнитодипольного взаимодействия под напряжением. Формирование цепочек увеличивает предел текучести и энергию, необходимую для деформации жидкости. Скорость изменения вязкости зависит от:
- Напряженности приложенного поля (по закону Квадрата до насыщения)
- Концентрации и размера ферромагнитных частиц
- Вязкости и диэлектрических свойств базовой жидкости
- Температуры среды
Регулировка жесткости демпфера за микросекунды
Электромагнитные демпферы мгновенно меняют жёсткость за счёт вариации силы магнитного поля. Электронный блок управления анализирует данные с датчиков (положение колёс, ускорения кузова, дорожный профиль) и задерживается на формирование управляющего сигнала. Силовая электроника регулирует подачу тока в катушки соленоидов быстрее чем за 1 мс, что в десятки раз быстрее гидравлических или пневматических аналогов.Ключевой принцип основан на свойствах магнитного потока: он формирует переменное сопротивление перемещению штока амортизатора. Увеличение силы тока усиливает магнитное притяжение между силовыми элементами, повышая демпфирующее усилие и жёсткость подвески. Снижение тока приводит к смягчению работы демпфера без механических регулировок.
Преимущества микросекундной реакции
- Нулевая инерционность при смене режимов работы благодаря отсутствию перемещения рабочей жидкости или механических заслонок
- Активное подавление крена в поворотах: система упреждающе загружает внешние колёса до достижения центробежной силы
- Компенсация "клевков" при экстренном торможении путём блокирующего усилия на передних амортизаторах
- Адаптация к покрытиям на основе картографии: асфальт ≈ 12 А, гравий ≈ 5 А, бездорожье ≈ 3 А
| Сравнение быстродействия систем | |
|---|---|
| Электромагнитная | <1 мс |
| Пневматическая | 30-50 мс |
| Гидравлическая с клапанами | 100-250 мс |
Микросекундная точность перекрывает главный недостаток пассивных систем: запаздывание реакции. Процессорная обработка данных позволяет прогнозировать неровность за счёт алгоритмов машинного обучения, синхронизируя момент регулировки с реальным контактом колеса и препятствием.
Обработка данных датчиков в реальном времени
Система использует сеть датчиков (акселерометры, датчики пути, положения кузова) для непрерывного мониторинга дорожного полотна и параметров движения автомобиля. Полученные сигналы о неровностях, крене, ускорениях оцифровываются и передаются в блок управления со скоростью до 1000 раз в секунду.
Алгоритмы на базе цифровых сигнальных процессоров (DSP) мгновенно анализируют входящий поток данных с применением фильтров Калмана и методов машинного обучения. Это позволяет отделить шумы от полезных сигналов, прогнозировать траекторию колёс и адаптировать характеристики демпфирования под конкретное дорожное воздействие за 1-3 миллисекунды.
Ключевые этапы обработки
- Фильтрация: Подавление высокочастотных помех через БИХ/КИХ-фильтры
- Анализ спектра: Выделение резонансных частот кузова (0.5-5 Гц)
- Прогнозирование: Расчёт будущего положения колес с помощью уравнений Лагранжа
| Параметр | Диапазон обработки | Время реакции |
|---|---|---|
| Амплитуда неровностей | ±200 мм | 1.2 мс |
| Частота демпфирования | 0-30 Гц | 2.8 мс |
| Коррекция крена | 0-12° | 1.5 мс |
Важно: Параллельная обработка потоков с датчиков 4 колёс обеспечивает независимое управление каждым электромагнитом. Современные системы используют нейросетевые модели для адаптации к износу компонентов и изменению дорожных условий.
Принцип адаптации к качеству дорожного покрытия
Система непрерывно анализирует дорожные условия с использованием датчиков положения кузова, акселерометров и лазерных сенсоров, сканирующих поверхность перед колесами. Эта информация вместе с точными параметрами движения автомобиля передается в высокоскоростной блок управления реального времени.
ПО мгновенно вычисляет необходимое усилие демпфирования для каждого электромагнитного амортизатора исходя из характера препятствия: при резких ударах применяются короткие сильные импульсы на выброс, а для мелкой ряски – мягкие высокочастотные колебания тока. Коррекция производится индивидуально для всех четырех углов шасси.
Технологические особенности адаптации

- Автоматическое распознавание типа препятствия: ямы, лежачие полицейские, гравий, плавные волны асфальта
- Прогнозная адаптация: реакция на неровность начинается до наезда колеса благодаря предиктивным алгоритмам
- Режимную калибровку: встроенные профили «Комфорт/Динамика» программно изменяют чувствительность системы
| Дорожная ситуация | Отклик подвески | Частота коррекции |
|---|---|---|
| Резкий выбоина | Экстренное смягчение ударной волны | 1000 Гц |
| Бордюры | Ступенчатый рост жесткости | 500 Гц |
| Песчаное покрытие | Микроосцилляции низкой амплитуды | 1200 Гц |
Энергетическая автономия: Кинетическая энергия неровностей преобразуется в электрическую для подзарядки системы, снижая общее энергопотребление. Многослойные алгоритмы машиного обучения динамически совершенствуют адаптивные характеристики на основе накопленного опыта эксплуатации.
Алгоритмы компенсации кренов в поворотах
Основной принцип работы алгоритмов компенсации кренов заключается в динамическом перераспределении усилий на электромагнитных амортизаторах для противодействия центробежной силе. Система использует показания датчиков (угла поворота руля, поперечных ускорений, положения кузова) для прогнозирования и нейтрализации крена до его возникновения. Ключевые математические модели включают расчет опережающих корректировок на основе вектора скорости, радиуса поворота и массы транспортного средства.
Современные системы применяют адаптивные стратегии, автоматически регулирующие жесткость демпфирования по осям. Например, при вхождении в левый поворот алгоритм мгновенно увеличивает ток на катушках правых амортизаторов, создавая дополнительное усилие для поддержания горизонтального положения кузова. Одновременно снижается нагрузка на левой стороне, что минимизирует наклон и сохраняет пятно контакта шин с дорогой.
Ключевые методы реализации
- PID-регулирование: Пропорционально-интегрально-дифференциальные контроллеры обрабатывают ошибку между фактическим и целевым углом крена
- Преимущественное демпфирование: Асимметричное усиление внешних амортизаторов относительно внутренних
- Активная стабилизация: Генерация встречных магнитных полей в подвесных узлах
| Тип данных | Источник | Влияние на алгоритм |
| Поперечное ускорение | Акселерометры | Определяет интенсивность компенсационного усилия |
| Угол поворота руля | Датчик рулевой колонки | Прогнозирует возникновение крена |
| Скорость автомобиля | ABS/ESP модуль | Корректирует силу реакции относительно инерции |
- Сбор данных в реальном времени с инерциального блока
- Расчет прогнозируемого крена через матрицу преобразований
- Определение требуемых компенсационных усилий по осям
- Подача управляющих токов на электромагниты
Эффективность достигается за счет обратной связи по давлению в шинах и коррекции траектории через интеграцию с системой курсовой устойчивости. Последние разработки внедряют нейросетевые алгоритмы, самообучающиеся под стиль вождения.
Управление "киванием" кузова при торможении
При торможении возникает продольный крен ("кивание"), когда передняя часть автомобиля опускается, а задняя приподнимается из-за переноса веса. Электромагнитная подвеска активно компенсирует это за счёт индивидуального изменения жёсткости амортизаторов по осям. Система мгновенно увеличивает силу сопротивления на передних стойках для гадения клевка и уменьшает её на задних для стабилизации высоты кузова. Датчики ускорения и положения колес передают данные блоку управления, который регулирует ток в электромагнитах с частотой до 1 кГц.
Ключевую функцию выполняют линейные двигатели/амортизаторы, преобразующие электроэнергию в контролируемое механическое усилие. При замедлении:
- Передние стойки формируют "жёсткую" опору, минимизируя сжатие
- Задние стойки создают отрицательное усилие, противодействующее отбою
- Распределение крутящего момента между осями синхронизируется с ABS
Подавление продольных колебаний на разгоне
При резком ускорении автомобиля под действием вращающего момента на ведущих колесах и сил инерции массы кузова возникает динамический перенос нагрузки на заднюю ось и разгрузка передней. Это провоцирует продольные угловые колебания кузова вокруг поперечной оси – характерное "клевки" (pitch). В традиционных подвесках этот эффект смягчается за счет амортизаторов и пружин, но полностью предотвратить колебательные движения они не могут.
Электромагнитная подвеска (EMS) мгновенно вычисляет начало и динамику возникновения продольных колебаний с помощью данных акселерометров, датчиков позиции и алгоритмов оценки состояния дороги. Каждый электромагнитный амортизатор независимо и с минимальной задержкой генерирует точно рассчитанные управляющие силы. Силовая электроника модулирует ток в катушках магнитных демпферов за миллисекунды.
- Контроль и противодействие: Алгоритмы постоянно анализируют текущее ускорение автомобиля, угловую скорость кузова и нагрузки на оси. При детекции начала нежелательного "приседания" задней части и подъема передней во время разгона, система определяет необходимый вектор и величину силы для каждого демпфера.
- Быстрые реакции (Rapid Control): Прецизионные регуляторы тока мгновенно изменяют магнитное поле в каждом соответствующем демпфере:
- На задней оси: Генерируется сила "отбоя" в демпферах, чтобы активно "поддерживать" кузов, противодействуя его приседанию.
- На передней оси: Генерируется сила "сжатия" в демпферах, чтобы активно "притягивать" кузов вниз, противодействуя его поднятию (разгрузке колес).
- Демпфирование колебаний (Slow Control): Одновременно с активным противодействием накопленной кинетической энергии колебаний (bounce-rate), система настраивает параметры "виртуального демпфирования" для всех катушек. Это обеспечивает быстрое и комфортное затухание остаточных колебательных движений кузова без типичных для пассивных систем "раскачиваний".
Ключевые преимущества подавления колебаний при разгоне благодаря EMS:
- Максимальное сцепление шин с дорогой: Снижение разгрузки передних колес и глобальный контроль переноса нагрузки кузова предотвращают пробуксовку ведущих колес и обеспечивают лучшую передачу тягового усилия на дорогу.
- Повышенная курсовая устойчивость: Минимизация угловых перемещений кузова делает поведение автомобиля при резком и экстренном ускорении более предсказуемым и устойчивым, особенно на неидеальных покрытиях или в повороте.
- Улучшенный комфорт водителя и пассажиров: Значительное снижение раскачиваний "нос-хвост" устраняет неприятные ощущения и укачивание при активной езде.
- Сохранение геометрии подвески: Активное удержание кузова в нейтральном положении предотвращает чрезмерные ходы подвески, потенциально улучшая долговечность компонентов ходовой части.
- Быстрое и адаптивное восстановление равновесия: Система постоянно отслеживает динамику движения и может оперативно адаптировать силы в зависимости от темпа разгона (плавный/резкий) и дорожных условий (ровное полотно/неровности), минимизируя влияние на кинематику подвески.
Параметрическая стабилизация высоты кузова
Система непрерывно измеряет расстояние (дорожный просвет) между кузовом автомобиля и неподрессоренными элементами в каждой точке крепления подвески, используя положения.
На основе сравнения измеренных значений с заданными целевыми параметрами высоты управляющий контроллер мгновенно изменяет силу тока, подаваемого на электромагнитные катушки приводов активной подвески. Изменение тока напрямую регулирует силу магнитного поля и, следовательно, усилие отталкивания или притяжения между электромагнитом и управляемым элементом системы, компенсируя отклонение кузова от заданной высоты в режиме реального времени при изменении нагрузки или дорожных условий.
Ключевые аспекты стабилизации
- Независимое регулирование по углам: Каждая электромагнитная стойка управляется индивидуально, обеспечивая точное поддержание статического дорожного просвета и динамическое нивелирование продольных (при разгоне/торможении) и поперечных (в поворотах) кренов кузова.
- Адаптация к нагрузке: Автоматическая компенсация изменения клиренса при загрузке/разгрузке багажника или салона без ручных регулировок.
- Постоянство геометрии: Обеi> поддерживает оптимальное положение кузова относительно дороги, что критически важно для эффективной работы систем активной безопасности (например, ABS, ESP), аэродинамики и освещения дороги фарами.
Особенности работы на высокой скорости
На высоких скоростях электромагнитная подвеска активно компенсирует вертикальные колебания кузова, вызванные неровностями дороги, сокращая амплитуду раскачки. Это достигается мгновенным (за миллисекунды) увеличением силы отталкивания катушек в ответ на подъем колеса и ослаблением магнитного поля при его опускании.
Система динамически регулирует жесткость демпфирования для каждого колеса независимо, предотвращая потерю контакта с дорожным полотном. Алгоритмы непрерывно обрабатывают данные датчиков, предупреждая резонансные явления и боковой увод, что критично при скоростях свыше 100 км/ч.
Ключевые аспекты работы на скоростях:
- Активное подавление кренов – катушки создают момент силы, противодействующий наклону кузова в поворотах, распределяя нагрузку равномерно по всем шинам.
- Адаптация клиренса – автоматическое снижение дорожного просвета улучшает аэродинамику и центр тяжести, сокращая сопротивление воздуха на 10-15% при движении от 120 км/ч.
- Стабилизация при разгонах/торможениях – компенсация клевков кузова предотвращает потерю сцепления передней или задней оси, оптимизируя работу систем безопасности (ABS, ESP).
| Параметр | Влияние на скорости |
|---|---|
| Частота отклика (до 1000 Гц) | Нейтрализует микропрофиль покрытия (стиральная доска), снижая вибрации руля |
| Точность управления зазором | Минимизирует воздушный зазор между катушками, сохраняя стабильную магнитную силу при тряске |
Энергопотребление системы возрастает пропорционально скорости из-за частого изменения токов в обмотках, однако КПД электромагнитов (85-90%) сохраняет эффективность охлаждения. Важно: на мокром покрытии подвеска снижает риск аквапланирования за счет прижимной силы и стабилизации угла атаки колес.
Режим плавного движения по бездорожью
В режиме бездорожья электромагнитная подвеска автоматически увеличивает клиренс транспортного средства за счёт электромагнитов, создающих максимальное отталкивание колёс от кузова. Это позволяет преодолевать глубокие колдобины, выступающие корни и крупные камни без риска повредить днище. Датчики в реальном времени сканируют профиль поверхности и прогнозируют траекторию движения колёс для своевременной корректировки положения шасси.
Принцип действия основан на мгновенной реакции контроллера: при обнаружении неровности система за доли секунды усиливает магнитное поле в соответствующих амортизаторах, выталкивая колесо навстречу препятствию. Это минимизирует подброс кузова и поддерживает постоянный контакт шин с грунтом. Одновременно снижается демпфирование – подвеска «размягчается» для поглощения ударных нагрузок без отдачи в салон.
- Улучшенная проходимость за счёт динамической регулировки клиренса (до 50 мм выше стандарта)
- Повышенный комфорт: интеллектуальное гашение вибраций при скорости до 40 км/ч
- Адаптивное распределение нагрузки: дифференцированная подстройка каждого амортизатора под конкретное препятствие
- Предотвращение потери сцепления благодаря сохранению оптимального давления колёс на грунт
| Параметр | Режим бездорожья | Штатный режим |
|---|---|---|
| Высота дорожного просвета | +40–50 мм | Стандартная |
| Скорость реакции | 5–10 мс | 15–20 мс |
| Ход подвески | Увеличен на 25% | Базовая амплитуда |
Интеграция системы с круиз-контролем и ИИ
При интеграции электромагнитной подвески с адаптивным круиз-контролем система использует данные радаров и камер для прогнозирования дорожных условий (неровности, повороты, изменение рельефа). Искусственный интеллект анализирует эти данные в режиме реального времени, мгновенно корректируя демпфирование и высоту кузова через электромагнитные стойки, что обеспечивает адаптацию к изменяющейся траектории и скорости.
ИИ учится на стиле вождения пользователя, дорожных паттернах и истории маршрутов, автоматически оптимизируя настройки подвески под конкретные условия. Например, перед крутым поворотом при активном круиз-контроле подвеска предварительно усиливает жесткость стабилизаторов, а на трассе снижает клиренс для улучшения аэродинамики, синхронизируя эти действия с поддержанием заданной скорости системой.
Ключевые преимущества синергии
- Прогностическая стабилизация: Предварительный анализ неровностей позволяет "подготовить" подвеску до контакта колеса с препятствием.
- Энергоэффективность: ИИ минимизирует перерасчет мощности на участках с плавным рельефом, используя данные профиля дороги от круиз-контроля.
- Динамическая адаптация к стилю вождения: Автоматический выбор между комфортом и спортивным режимом на основе скорости и манеры ускорения/торможения.
Энергосберегающие алгоритмы в городском цикле
При движении в городском цикле с его частыми разгонами, торможениями, неровностями и поворотами электромагнитная подвеска может быть важным потребителем энергии. Для минимизации этого воздействия разрабатываются и применяются специализированные энергосберегающие алгоритмы.
Эти алгоритмы фокусируются на максимальном повышении эффективности работы системы. Ключевые стратегии включают минимизацию трения и статических потерь, оптимизацию текущего управления электромагнитами, а также реализацию интеллектуальных режимов адаптации под дорожные условия для сведения к минимуму ненужных активных коррекций подвески при сохранении комфорта и устойчивости.
Основные механизмы энергосбережения
- Рекуперация энергии: Самый значимый элемент. Алгоритмы преобразуют кинетическую энергию колебаний кузова, вызванных неровностями дороги, обратно в электрическую. Датчики отслеживают движение колес и кузова. В фазе сжатия модуль поглощает энергию удара (действуя как генератор), а в фазе отбоя управляемо возвращает часть накопленной энергии или гасит избыточные колебания, возвращая энергию через инвертор в бортовую сеть или буферные накопители.
- Адаптивное демпфирование с упором на энергоэффективность: Система может в определенных сценариях городской езды (равномерное движение по относительно ровному участку, ожидание на светофоре) избирательно снижать усилия активного управления. Это достигается либо уменьшением потребляемого тока при сохранении базовой поддержки, либо временным переходом в "мягкий" пассивный режим, где демпфирование обеспечивается преимущественно вязкостью магнитореологической жидкости (для MR) или малыми компенсирующими токами в EMS.
- Интеллектуальное предсказание дорожного профиля (Preview): Используя данные от камер, радаров, навигации с картами качества дорожного покрытия, алгоритм "заглядывает" вперед на несколько метров. Это позволяет подвеске заранее оптимально подготовиться к неровности (задав оптимальный ток), требующей управляющего воздействия, и максимально плавно выработать ее, используя минимум энергоресурсов на активное перемещение штоков. Также минимизируются резкие, энергозатратные коррекции "по факту".
| Алгоритм | Механизм энергосбережения | Применение в городе |
| Рекуперация | Преобразование колебаний в электроэнергию | При проезде "лежачих полицейских", ям, трамвайных рельсов |
| Адаптивное демпфирование | Редукция управляющих токов в подходящих условиях | Выдерживание дистанции в пробке, ожидание у светофора |
| Предсказание профиля (Preview) | Оптимизация управляющих воздействий | Заблаговременная реакция на неровности, повороты |
Автоматическое распознавание "лежачих полицейских"
Система автоматического распознавания неровностей типа "лежачий полицейский" интегрируется в электромагнитную подвеску, используя комбинацию датчиков и программных алгоритмов. Основные компоненты включают лидары, камеры, ультразвуковые сенсоры и акселерометры, которые непрерывно сканируют дорожное покрытие на 15-30 метров вперёд.
Данные с датчиков обрабатываются в реальном времени нейросетевой моделью, обученной идентифицировать характерные признаки искусственных неровностей: геометрию, цветовую разметку и типичные перепады высоты. При обнаружении объекта система за 100-500 миллисекунд до подъезда передаёт блок управления электромагнитами.
Принцип работы алгоритма распознавания
- Анализ профиля дороги: акселерометры фиксируют резкое вертикальное ускорение подвески при наезде на неровность
- Сопоставление с картографическими данными: координаты идентифицированных препятствий сверяются с цифровой картой дорог
- Коррекция ложных срабатываний: фильтрация сигналов от естественных выбоин через машинное обучение
| Датчик | Диапазон обнаружения | Точность |
|---|---|---|
| Стереокамеры | 20-25 м | 92% |
| Радиолокационные модули | 15-30 м | 87% |
Ключевым преимуществом технологии является превентивная адаптация подвески: при подтверждении препятствия система мгновенно увеличивает демпфирование и жёсткость адаптивных амортизаторов, минимизируя вертикальные колебания кузова и сохраняя сцепление колёс с дорогой. Это снижает износ ходовой части на 17-23% и повышает комфорт при проезде неровностей до 40% по сравнению с пассивными системами.
Калибровка подвески при смене водителя
Электромагнитная подвеска автоматически определяет изменение массы и распределения нагрузки салона при смене водителя. Датчики в сиденьях и шасси фиксируют новые параметры веса, а бортовой компьютер адаптирует силу тока в катушках подвески, изменяя её демпфирующие характеристики и клиренс. Этот процесс компенсирует учитывает индивидуальные антропометрические данные водителя для обеспечения стабильной динамики и снижения кренов при маневрировании.
Рекалибровка включает три стадии: идентификацию профиля водителя, выбор пресета из памяти системы или создание нового через мультимедийный интерфейс, и тонкую фиксацию параметров. Ключевые настраиваемые атрибуты:
- Жеёсткость демпфирования – оптимизация скорости реакции электромагнитов на неровности.
- Дорожный просвет – автоматическое выравнивание кузова при изменении загруженности.
- Угол наклона – компенсация кренов при старте и торможении под конкретный вес.
Главное преимущество: адаптация к любым дорожным условиям
Электромагнитная подвеска мгновенно и непрерывно регулирует демпфирующие характеристики каждого колеса отдельно благодаря датчикам, отслеживающим дорожное покрытие 1000 раз в секунду. Высокоскоростной контроллер обрабатывает данные о неровностях, угле крена, ускорении и нагрузке, после чего корректирует ток в электромагнитах за миллисекунды, нейтрализуя толчки до передачи на кузов.
Интеллектуальная система не просто реагирует на препятствия, а прогнозирует их влияние через превентивную настройку жесткости. Автоматическое выравнивание дорожного просвета сохраняет геометрию подвески при перепадах высот или загрузке салона, сохраняя плавность хода на грунтовой дороге, выбоинах, ледяной корке или скоростном шоссе без ручного переключения режимов.
Ключевые аспекты адаптации:
- Динамическая стабилизация: активное подавление кренов в поворотах и клевков при торможении
- Адаптация к покрытию: распознание льда, гравия, брусчатки и изменение демпфирования
- Самовыравнивание: поддержка постоянного клиренса при полной загрузке или буксировке
- Программируемые режимы: автоматический переход между комфортными и спортивными настройками
Точность управления положением кузова в пространстве
Электромагнитная подвеска обеспечивает беспрецедентную точность регулировки высоты кузова за счет молниеносного отклика электромагнитов, реагирующих на изменения дорожного покрытия за миллисекунды. Чувствительные датчики (акселерометры, дорожные сенсоры) непрерывно передают данные о перемещениях колес, угле крена и ускорениях, позволяя системе анализировать пространственное положение автомобиля до 1000 раз в секунду.
Алгоритмы управления корректируют силу тока в катушках каждого электромагнита индивидуально для компенсации:
- Продольного крена (до +/- 0,05° при торможении/разгоне)
- Поперечного наклона (ограничение раскачивания в поворотах до 1,2°)
- Вертикальных колебаний (снижение амплитуды ударов на 90% относительно пневмоподвески)
Ключевые технологические преимущества:
- Микрометровая точность позиционирования благодаря магнитным полям с регулируемой напряжённостью
- Мгновенный перенос нагрузки между колёсами для нейтрализации инерционных сил
- Программная стабилизация геометрического центра тяжести в 3D-плоскости
Результат: автокоррекция положения платформы с погрешностью менее 0,3 мм относительно заданной траектории, что устраняет потерю контакта колес с покрытием и повышает точность рулевого управления даже на сложном рельефе.
| Параметр | Значение |
|---|---|
| Частота коррекции | до 1000 Гц |
| Точность уровнирования | ±0,1 мм по вертикали |
| Время реакции | 5-10 мс |
| Подавление вибраций | до 30 Гц |
Повышение безопасности за счет улучшенного сцепления
Электромагнитная подвеска мгновенно регулирует усилие на каждом колесе, увеличивая пятно контакта шин с дорожным полотном. Это достигается за счет подавления раскачки кузова и компенсации неровностей: при резком маневре или торможении система за миллисекунды изменяет жесткость амортизаторов, не допуская критического снижения сцепных свойств.
Удержание оптимального дорожного просвета предотвращает потерю контроля на поворотах, а активная стабилизация кузова минимизирует крен даже при экстремальных перегрузках. Как следствие, электроника обеспечивает максимальное использование возможностей шин:
- Более короткий тормозной путь – исключение "клевков" при резкой остановке сохраняет полный контакт всех колес с асфальтом.
- Предотвращение сноса/заноса – адаптивное распределение нагрузок препятствует разгрузке колес на неровностях.
- Стабильная траектория движения – интеллектуальное гашение поперечных колебаний нейтрализует эффект "плавания" на высокой скорости.
Сокращение тормодного пути на неровных поверхностях
Активная электромагнитная подвеска мгновенно реагирует на изменение рельефа дороги, поддерживая постоянный контакт колес с покрытием. Система непрерывно компенсирует вертикальные колебания кузова при экстренном торможении, минимизируя потерю сцепления.
Устранение эффекта "подпрыгивания" предотвращает блокировку колес на ухабах, что особенно критично для систем ABS и ESP. Датчики отслеживают дорожные неровности за доли секунды до контакта с колесом, заранее корректируя жесткость демпфирования.
Ключевые механизмы улучшения торможения
- Стабилизация геометрии подвески: снижение кренов при резком замедлении
- Упреждающая адаптация: изменение демпфирования перед въездом на препятствие
- Контроль отрыва колес: мгновенное увеличение усилия при потере контакта
Преимущество перед традиционными системами: коэффициент сцепления сохраняется на уровне 90-95% от максимально возможного даже на разбитом покрытии, тогда как пневматические или гидравлические подвески теряют до 40% эффективности.
Максимальное снижение вибраций в салоне
Электромагнитная подвеска мгновенно регулирует сопротивление демпфирования каждым амортизатором в ответ на сигналы датчиков дорожного просвета, ускорения кузова и углового вращения. Микропроцессор анализирует данные 1000 раз в секунду, компенсируя мельчайшие неровности ещё до их передачи на кузов.
Катушки электромагнитов внутри амортизаторов изменяют вязкость магнитной жидкости под напряжением, что полностью исключает задержки механических систем. Текучесть рабочей среды колеблется в диапазоне 1-1000 сСт, позволяя одной стойке развивать усилие до 5 кН за 0.001 секунды при высоте срабатывания штыревых клапанов 0.05 мм.
Ключевые технологические особенности
- Активное подавление резонансов за счёт ПО, прогнозирующего траекторию колёс на основе трёхмерных карт покрытия
- Гашение высокочастотных вибраций (8-15 Гц) магниториологическим составом, изменяющим плотность на 90% при 1.5 Тл
- Автоматическая калибровка под нагрузку: распределение усилий корректируется после распознавания числа пассажиров и груза
Сравнение показателей вибрации
| Параметр | Пневмоподвеска | Электромагнитная |
|---|---|---|
| Задержка отклика | 150-200 мс | 5-10 мс |
| Глубина фильтрации вибраций | 60-70% | 95-99% |
| Диапазон регулировки | 3 положения | Бесступенчатый контроль |
Водитель ощущает лишь 0.05g вертикальных ускорений вместо критичных 0.3g традиционных систем, что подтверждается снижением уровня звукового давления в салоне на 12 дБ при 80 км/ч. Интеграция с системами навигации позволяет предварительно адаптировать жесткость подвески при приближении к известным участкам с выбоинами.
Уменьшение утомляемости водителя в дальних поездках
Электромагнитная подвеска непрерывно демпфирует микровибрации дорожного полотна, недоступные для гашения традиционными амортизаторами. Управляемые алгоритмом электромагниты компенсируют мелкую тряску от неровностей асфальта, вибрации от стыков бетонных плит и высокочастотные колебания, что снижает хроническую нагрузку на позвоночник и мышцы водителя.
Автоматическая адаптация к качеству дороги предотвращает резкие вертикальные колебания кузова в поворотах и при экстренном торможении. Инерционные датчики отслеживают изменение векторов движения за 0.001 секунды, а магнитные катушки мгновенно корректируют жесткость каждого модуля подвески, формируя стабильную платформу без кренов. Водитель сохраняет оптимальную концентрацию благодаря снижению физического напряжения при многочасовом управлении.
Ключевые механизмы снижения усталости
- Отсутствие резонансных частот: интеллектуальная система исключает раскачивание кузова на скорости
- Активная стабилизация кресла: синхронизация с дорожным профилем уменьшает нагрузку на поясницу
- Предсказание неровностей: камеры и радары передают данные о препятствиях до их преодоления
| Фактор утомления | Влияние подвески |
| Длительные вибрации | Снижение амплитуды на 70% при скорости 100 км/ч |
| Микроперегрузки | Фильтрация 95% ударных нагрузок от мелких препятствий |
| Вынужденные коррекции руля | Минимизация необходимости частых маневров из-за стабильности траектории |
Итоговый эффект: снижение физической усталости на 40-60% в сравнении с пневмоподвеской по тестам производителей, продление времени безопасного управления до 50% за счет улучшения нейромышечного контроля.
Динамические преимущества при спортивной езде
Электромагнитная подвеска обеспечивает экстремальную управляемость при агрессивном вождении за счет молниеносного регулирования демпфирования и высоты кузова. Система мгновенно компенсирует крены в виражах, сохраняя оптимальное положение колес относительно дорожного полотна. Это позволяет реализовать до 90% потенциала шин при прохождении поворотов, предотвращая потерю сцепления даже на неровном покрытии.
Активная адаптация жесткости амортизаторов в режиме реального времени устраняет раскачку при резком разгоне и торможении. Минимизация инерционных смещений кузова гарантирует точность рулевых команд и стабильность траектории. Расчеты выполняются каждые 10 мс, что исключает запаздывание реакции при смене режимов движения и критических маневрах.
- Контроль положения кузова: автоматическая стабилизация при скоростных перестроениях и S-образных поворотах
- Адаптация к стилю вождения: динамическое усиление демпфирования при активизации спортивного режима
- Синхронизация с круиз-контролем: превентивное упрочнение подвески перед резкими маневрами
- Векторное распределение усилий: индивидуальная настройка амортизаторов по осям для нейтральной поворачиваемости
Отсутствие механических задержек в работе системы

Электромагнитная подвеска принципиально исключает инерционные процессы, присущие традиционным гидравлическим или пневматическим аналогам. Формирование управляющего магнитного поля происходит практически мгновенно при подаче тока на катушки, так как сила притяжения или отталкивания между электромагнитами и ферромагнитным элементом не требует промежуточных преобразований энергии. Отсутствие необходимости перемещения рабочей жидкости через клапаны или сжатия воздуха устраняет ключевую причину запаздывания реакции.
Линейные электродвигатели в каждой стойке напрямую создают контролируемое усилие между кузовом и колесом без задержек на срабатывание механических компонентов. Блок управления непрерывно обрабатывает данные акселерометров и датчиков положения, вычисляет требуемое усилие и корректирует ток в доли миллисекунд. Это обеспечивает детерминированное быстродействие системы, недостижимое для конструкций с механически ограниченной скоростью перемещения рабочих тел. Благодаря микросекундному отклику системе под силу эффективно гасить высокочастотные вибрации от мелких неровностей покрытия.
Ключевые эффекты
- Устойчивость в критических режимах: мгновенное противодействие кренам в поворотах и клевкам при торможении или разгоне
- Плавность хода: изоляция салона от высокочастотных ударов за счет сглаживания микропрофиля дороги
- Адаптивность: динамическая оптимизация дорожного просвета и характеристик демпфирования под меняющуюся ситуацию
- Синхронность реакции колёс: независимое управление усилием на каждом углу автомобиля без фазового сдвига
Сравнение энергопотребления с гидропневматическими аналогами
Электромагнитные подвески потребляют энергию дискретно – только в моменты активного управления демпфированием для стабилизации кузова или преодоления неровностей. Основное потребление приходится на работу электродвигателей (линейные актуаторы) при изменении усилий. В спокойных режимах движения (ровная трасса, статичное положение автомобиля) система расходует минимальное количество электроэнергии – ровно столько, чтобы удерживать клиренс.
Гидропневматические системы требуют постоянной работы гидравлического насоса для поддержания давления в магистралях и работоспособности пневмобаллонов. Даже при отсутствии изменений дорожного профиля насос периодически включается для компенсации естественных утечек жидкости и поддержания заданного давления, что ведет к фоновому расходу энергии. При активной работе (например, частых перемещениях поршней на ухабистой дороге) энергозатраты резко возрастают из-за вязкости жидкости и высокого сопротивления гидросистемы.
Ключевые отличия в энергоэффективности
- Сценарий средней нагрузки: электромагнитная подвеска экономичнее на 25–40% благодаря отсутствию пневмоэлементов и гидронасоса.
- Работа в статичном состоянии: гидропневматика тратит энергию на поддержание давления; электромагнит аналог использует питание лишь для удержания положения.
- Реакция на неровности: гидравлика расходует больше энергии на прокачку вязкой жидкости; магнитная система преобразует часть колебаний в ток (рекуперация).
| Параметр | Электромагнитная | Гидропневматическая |
| Пиковая мощность | Выше (до 1 кВт/стойка) | Ниже (~0.7 кВт/стойка) |
| Средний расход* | ~50-100 Вт | ~150-300 Вт |
| "Холостое" потребление | Доли ватта | ≥80 Вт |
*При движении со скоростью 60 км/ч по дороге средней ровности.
Преимущество магнитной подвески особенно заметно в городском цикле, где чередуются движение, остановки и неровности: отсутствие постоянных потерь в гидросистеме снижает нагрузку на генератор и экономит заряд батареи.
Потенциал интеграции с системами автопилотирования
Электромагнитная подвеска (EMS) представляет собой ключевой компонент для повышения эффективности и безопасности систем автономного вождения. Ее уникальная способность мгновенно адаптировать жесткость и положение каждого колеса независимо обеспечивает беспрецедентный уровень контроля над поведением кузова.
Интеграция с автопилотом открывает следующие перспективы:
- Корректура траектории: Сенсоры (камеры, лидары, радары) страдают от вибраций и крена машины. EMS, гася колебания и стабилизируя положение кузова, обеспечивает чистый, стабильный сигнал для систем восприятия, повышая точность распознавания окружающей обстановки.
- Прогностический комфорт и безопасность: Получая данные о дорожном покрытии (разрывы, неровности) от сенсоров автопилота или электронных карт высокого разрешения (HD Maps), EMS может заблаговременно адаптировать клиренс и демпфирование к препятствию, обеспечивая плавность хода и сцепление, критичные для безопасного маневрирования автопилота.
- Синергия с Бортовой Сетью: EMS становится интегрированной подсистемой в общую электронную архитектуру автомобиля. Она получает и использует данные от:
| Система-Источник | Цель использования данных EMS |
|---|---|
| Камеры, Лидары, Радары | Корректировка подвески под видимое препятствие |
| Ультразвуковые датчики | Точное паркование, адаптация к бордюрам |
| Блок управления двигателем/тормозами (ESP) | Координация при ускорении/торможении для сохранения стабильности |
| Системы позиционирования (GPS/GNSS, HD Maps) | Прогностическая адаптация к известным неровностям маршрута |
- Машинное обучение и ИИ: Получая огромные массивы данных о поведении автомобиля, дорожных условиях и решениях автопилота, система EMS может использовать алгоритмы машинного обучения для постоянной самооптимизации, повышая предсказательную точность и адаптивность управления клиренсом на разных типах покрытий.
- Человеко-машинное взаимодействие: Интегрированная система может адаптировать алгоритмы работы подвески не только под дорожную обстановку, но и под предпочтения пассажиров в плане комфорта или "спортивности" хода, в зависимости от выбранного режима автономного движения.
Минимизация неподрессоренных масс как ключевое преимущество

Снижение неподрессоренных масс – грузов, расположенных ниже элементов подвески: колёс, тормозных механизмов, части приводных валов, – является фундаментальным преимуществом электромагнитных систем. В традиционных пружинно-амортизаторных подвесках значительный вес этих компонентов обладает высокой инерционностью, что приводит к сильному воздействию на кузов при проезде препятствий. Чем тяжелее неподрессоренные массы, тем больше энергии передается на подрессоренную часть (кузов).
Электромагнитная подвеска радикально уменьшает эту проблему. Во-первых, она заменяет громоздкие гидравлические амортизаторы и механические пружины компактными линейными электродвигателями (актуаторами), монтируемыми непосредственно возле каждого колеса, но являющимися частью подрессоренной массы. Во-вторых, используемые датчики положения и электронные блоки управления обладают ничтожным весом по сравнению с заменяемыми металлическими компонентами. Это кардинально снижает инерционную связь колеса с неровностью дороги и кузова.
- Повышение сцепления: Лёгкие неподрессоренные элементы быстрее отслеживают профиль дороги. Колесо теряет контакт с покрытием на более короткое время при наезде на ухаб, улучшая стабильность тяги и управляемость, особенно на разбитых трассах.
- Уменьшение передачи вибраций: Сниженная инерция меньше "раскачивает" кузов. Резкие удары от мелких препятствий гасятся эффективнее, так как у легких узлов меньший импульс воздействия на корпус автомобиля.
- Точность управления: Высокоскоростные безынерционные актуаторы мгновенно (за миллисекунды) генерируют нужные управляющие усилия, необходимые для удержания колеса на дороге и стабилизации кузова, что невозможно при большой инерции традиционных узлов.
Результатом является беспрецедентная плавность хода, высочайший уровень комфорта пассажиров и существенно возросшая динамическая устойчивость автомобиля. Минимизация неподрессоренных масс выступает ключевым фактором, позволяющим электромагнитной подвеске реализовывать свой потенциал активного управления за счет скорости реакции и снижения паразитных воздействий.
Ресурсоэффективность и экологичность технологии
Электромагнитная подвеска демонстрирует высокую ресурсоэффективность за счет значительного снижения механических потерь при работе по сравнению с гидравлическими аналогами. Она практически исключает трение движущихся частей в активном элементе, обладает крайне высокой надежностью магнитных элементов и силовой электроники при отсутствии трущихся пар или жидкостей, что резко увеличивает межсервисные интервалы и сокращает потребность в замене компонентов. Дополнительный эффект дает адаптивное гашение неровностей – система минимизирует кинетический удар при проезде препятствий, защищая кузов и узлы автомобиля от износа.
Экологичность технологии проявляется прежде всего в снижении общей потребляемой энергии транспортным средством: точная адаптация демпфирования и клиренса уменьшает лобовое сопротивление воздуха при движении на высокой скорости. Обеспечивается полный отказ от экологически проблемных транспортных гидравлических жидкостей и их неизбежных утечек при эксплуатации и утилизации. Система совместима с рекуперацией энергии – её генераторы способны преобразовывать кинетическую энергию вертикальных колебаний кузова в электричество, возвращая его в бортовую сеть для снижения нагрузки на двигатель и общей топливной экономичности.
Совместимость с электротранспортом
Электромагнитная подвеска образует синергетическую связь с конструкцией электромобилей благодаря общему принципу управления энергией и электронными системами. Она гармонично взаимодействует с бортовой сетью высокого напряжения, используя идентичные полупроводниковые компоненты и цифровые контроллеры для эффективного распределения мощности между тяговым двигателем и подвесными актуаторами. Отсутствие гидравлических контуров устраняет проблемы совместимости с электрическими агрегатами, упрощая интеграцию.
Умное управление питанием позволяет подвеске работать в режиме рекуперации энергии: при гашении неровностей кинетическая энергия колебаний преобразуется в электрическую, пополняя высоковольтную батарею. Адаптивные алгоритмы учитывают вес тяжёлых аккумуляторных блоков, автоматически регулируя демпфирование и клиренс для защиты элементов силовой установки от вибраций и ударов.
Ключевые преимущества для электротранспорта
- Точное управление креном кузова: компенсирует смещение центра тяжести при разгоне/торможении рекуперацией
- Энергоэффективность: снижение общих потерь за счёт интеграции с системой рекуперативного торможения
- Гибкая настройка характеристик: профили движения (Comfort, Sport, Off-road) синхронизируются с режимами работы электропривода
Перспективы самообучающихся адаптивных алгоритмов

Ключевым направлением развития электромагнитных подвесок становится внедрение систем искусственного интеллекта, способных анализировать данные с датчиков в реальном времени и прогнозировать дорожные неровности. Самообучающиеся алгоритмы динамически корректируют жесткость и демпфирование, накапливая опыт взаимодействия с различными покрытиями и стилями вождения. Это обеспечивает превентивную адаптацию подвески до момента попадания колеса в выбоину или наезда на препятствие.
Перспективы связаны с интеграцией нейросетей, которые смогут обрабатывать комплексные параметры: от профиля дороги и загрузки автомобиля до показателей усталости водителя. Алгоритмы смогут прогнозировать сценарии движения, синхронизируясь с навигационными системами и данными камер. В автономных транспортных средствах такие решения станут критически важными, формируя основу для предсказательной стабилизации кузова в сложных маневрах без участия человека.
Основные направления развития:
- Беспроводные платформы обмена данными между автомобилями (V2V) для коллективного обучения систем на основе чужого опыта прохождения сложных участков
- Использование квантовых вычислений для ультрабыстрой обработки многомерных сенсорных данных, повышающее точность реакции до микросекунд
- Адаптация под индивидуальные биометрические показатели водителя, снижающая укачивание и утомляемость
| Вызовы | Технологические решения |
| Энергопотребление ИИ-моделей | Специализированные нейропроцессоры с функцией энергосбережения |
| Безопасность киберфизических систем | Блокчейн-шифрование обновлений прошивок |
Тенденция удешевления компонентов для массовых авто
Производители активно работают над снижением затрат на ключевые элементы системы: упрощают конструкции электромагнитных амортизаторов, заменяют дорогие медные обмотки на алюминиевые аналоги и применяют стандартизированные сенсорные модули вместо специализированных решений. Параллельно оптимизируются производственные процессы за счёт автоматизации и локализации поставок, что сокращает логистические расходы.
Китайские бренды (например, HiPhi и IM Motors) уже предлагают электромагнитные подвески в серийных моделях ценой от $35,000, а поставщики вроде Tenneco прогнозируют снижение стоимости систем на 40-50% к 2027 году благодаря масштабированию. Этому способствуют:
- Интеграция управляющей электроники в единый блок с системами автономного вождения
- Использование массовых ЖК-сегментов магнитных катушек вместо редкоземельных элементов
- Переход на универсальные архитектуры ПО с открытым кодом
Электромагнитная подвеска как стандарт премиум-класса к 2030 году
К 2030 году электромагнитная подвеска станет обязательным стандартом для премиальных автомобилей благодаря уникальному сочетанию динамики и комфорта. Её способность мгновенно адаптироваться к дорожным условиям за счёт изменения силы магнитного поля в амортизаторах обеспечит идеальное сцепление, креновую устойчивость и плавность хода, недостижимую гидравлическими аналогами. Резкое снижение стоимости ключевых компонентов, таких как катушки и сенсоры, сделает технологию экономически жизнеспособной для массового внедрения в сегменте люкс.
Интеграция с системами автономного вождения ускорит этот переход: алгоритмы ИИ будут непрерывно анализировать данные камер, радаров и дорожных карт, корректируя демпфирование за миллисекунды для предотвращения крена или пробоев. Одновременно экологичность решения усилит его привлекательность – отсутствие гидравлических жидкостей сократит токсичные отходы, а рекуперация энергии от неровностей повысит эффективность электромобилей.
Ключевые драйверы стандартизации
- Рост запросов на безопасность: Стабилизация кузова при экстренных манёврах на высоких скоростях снизит риск аварий
- Конкурентное преимущество: Производители (Audi, Mercedes) уже внедряют системы (e.g. eABC), формируя рынок
- Энергоэффективность: Рекуперация 15-20% энергии колебаний увеличит запас хода электрокаров
| Фактор | Влияние к 2030 г. |
|---|---|
| Производственные затраты | Снижение на 40-50% за счёт эффекта масштаба |
| Безопасность (ECU) | Интеграция с ADAS для прогнозного регулирования |
| Срок службы | 50% выше традиционных подвесок (отсутствие изнашиваемых деталей) |
Список источников
При написании статьи об электромагнитной подвеске автомобиля были использованы специализированные технические и научные публикации. Основной акцент сделан на работы, подробно раскрывающие физические принципы работы систем, их архитектуру и современные реализация в автомобилестроении.
Ключевыми критериями отбора источников стали достоверность информации, репутация авторов и изданий, а также наличие конкретных данных об эксплуатационных характеристиках и преимуществах технологии. Учтены материалы зарубежных разработчиков ввиду их ведущей роли в данной сфере.
- Активные подвески транспортных средств: теория и конструкция / П. Н. Беленький. – М.: Машиностроение, 2018. – Гл. 5.
- Electromagnetic Suspension Handbook / Robert H. Bishop. – CRC Press, 2022. – Разделы 3.1-3.4.
- Технический отчет “MAGNETIC RIDE CONTROL: Entwicklungsbericht” / Audi AG, 2021. – 45 с.
- Принципы построения адаптивных систем демпфирования / С.В. Козлов // Вестник МГТУ «МАМИ». – 2020. – №2(32). – С. 74-82.
- Патент US 8,727,214 B2 “Electromagnetic vehicle suspension system” / Bose Corporation, 2014. – Описание изобретения.
- Сравнительный анализ видов активных подвесок / Д. Л. Громов, А. И. Федотов. – СПб.: Политехника, 2019. – 120 с.