Круиз-контроль в автомобиле - история создания и польза
Статья обновлена: 28.02.2026
Круиз-контроль – это система в автомобиле, позволяющая водителю зафиксировать текущую скорость движения без необходимости постоянно удерживать ногу на педали акселератора.
Первые рабочие версии устройства появились в США в середине XX века: изобретатель Ральф Титор запатентовал механический «СпидоСтат» в 1950 году, а корпорация Chrysler представила серийный электронный круиз-контроль на модели Imperial 1958 года.
Сегодня эта технология стала стандартом, предлагая не только комфорт, но и повышение безопасности и экономичности вождения.
Основное назначение системы в автомобиле
Круиз-контроль предназначен для автоматического поддержания заданной водителем скорости движения без необходимости постоянного нажатия на педаль акселератора. Система берет на себя управление дроссельной заслонкой, регулируя подачу топлива в зависимости от дорожных условий.
Это позволяет стабилизировать движение на трассе, исключая непреднамеренные колебания скорости из-за усталости ноги водителя или неровностей дорожного покрытия. Устройство особенно эффективно на длинных прямых участках магистралей с минимальным трафиком.
Ключевые функции и преимущества

- Снижение утомляемости при дальних поездках за счет снятия нагрузки с правой ноги
- Точное соблюдение скоростного режима для предотвращения штрафов
- Оптимизация расхода топлива благодаря равномерному движению без резких ускорений
- Автоматическая адаптация к изменениям рельефа (подъемы/спуски)
- Концентрация на дорожной обстановке вместо контроля скорости
| Без круиз-контроля | С круиз-контролем |
| Постоянное давление на педаль газа | Автоматическое поддержание скорости |
| Колебания скорости ±10 км/ч | Отклонение не более ±2 км/ч |
| Увеличенный расход топлива | Экономия до 7% на трассе |
Принцип поддержания постоянной скорости
Круиз-контроль активируется водителем после достижения желаемой скорости. Система фиксирует текущее значение через датчики скорости и переходит в режим автоматического поддержания. Электронный блок управления (ЭБУ) постоянно сравнивает заданный показатель с реальной скоростью транспортного средства.
При отклонениях ЭБУ корректирует работу двигателя через исполнительные механизмы. Для ускорения увеличивает подачу топлива или открывает дроссельную заслонку. Для замедления – сокращает топливоподачу, а в современных системах может задействовать тормозную систему при значительном превышении. Основные элементы управления:
- Датчики скорости (ABS, трансмиссия или GPS)
- Электронный блок управления (мозг системы)
- Актуаторы (сервопривод дросселя, модули тормозов)
Алгоритм работы в режиме поддержания:
- Мониторинг текущей скорости 50-100 раз в секунду
- Расчет отклонения от заданного значения
- Корректировка положения дросселя с шагом 0.5-2%
- Плавное изменение тяги без рывков
| Ситуация | Действие системы |
|---|---|
| Спуск с горы | Принудительное снижение тяги → активация тормозов |
| Подъем в гору | Увеличение открытия дросселя до 90-95% |
Точность поддержания в современных системах достигает ±1-2 км/ч благодаря пропорционально-интегрально-дифференциальным (PID) алгоритмам. Система предсказывает сопротивление движению (уклоны, нагрузка) и компенсирует инерцию автомобиля.
Ключевые компоненты системы: обзор
Система круиз-контроля представляет собой комплекс технических элементов, синхронизированных для автоматического поддержания заданной скорости автомобиля. Каждый компонент выполняет строго определённую функцию в алгоритме управления.
Взаимодействие этих элементов обеспечивает точную корректировку скорости без участия водителя. Рассмотрим основные составляющие современной системы.
- Датчик скорости: Фиксирует текущую скорость движения через ABS, коробку передач или отдельный сенсор на трансмиссии.
- Электронный блок управления (ЭБУ): "Мозг" системы. Анализирует данные датчиков, сравнивает реальную скорость с заданной и отправляет команды исполнительным устройствам.
- Актуатор дроссельной заслонки: Регулирует подачу воздуха во впускной коллектор. Может быть электрическим (сервопривод) или вакуумным (пневмокамера с соленоидами).
- Органы управления: Кнопки/рычаги на руле или панели для установки скорости, её увеличения/снижения (+/-), возобновления (RES) и отключения (CANCEL).
- Датчики деактивации: Сенсоры педалей тормоза и сцепления. При нажатии мгновенно отключают систему через разрыв цепи безопасности.
| Компонент | Типы реализации | Функциональное назначение |
|---|---|---|
| Актуатор | Электрический, вакуумный, электронно-дроссельный | Физическое управление подачей топлива |
| Датчики скорости | ABS-сенсоры, датчик VSS, датчик выходного вала КПП | Мониторинг текущей скорости с точностью ±1-2 км/ч |
Современные системы интегрируют дополнительные сенсоры (уклона дороги, радары адаптивного круиз-контроля), но базовые компоненты остаются неизменными. Критически важна калибровка ЭБУ – отклонения в настройках вызывают рывки или запаздывание реакции.
Роль сервопривода в управлении дросселем
Сервопривод выступает ключевым физическим исполнителем в системе круиз-контроля. Он представляет собой электромеханическое или пневматическое устройство, непосредственно соединенное с тросом дроссельной заслонки или интегрированное в систему электронного управления дросселем (ETC). Его задача – точно позиционировать заслонку для регулирования потока воздуха, поступающего в двигатель.
Получая электрические сигналы от блока управления круиз-контроля, сервопривод преобразует их в механическое движение. Блок управления постоянно анализирует текущую скорость автомобиля (через датчики скорости колес или трансмиссии) и сравнивает ее с заданной водителем. На основе этой разницы формируется управляющий сигнал для сервопривода.
Принцип работы и взаимодействие
При активации круиз-контроля и установке желаемой скорости сервопривод начинает функционировать в одном из трех основных режимов:
- Поддержание скорости: Сервопривод удерживает дроссельную заслонку в строго определенном положении, соответствующем заданной скорости при текущих условиях движения (ровная дорога, отсутствие ветра).
- Ускорение: При необходимости повысить скорость (например, после нажатия кнопки "+" или "Resume") сервопривод плавно приоткрывает дроссель, увеличивая подачу топливовоздушной смеси.
- Замедление: При снижении заданной скорости, обнаружении превышения скорости (например, на спуске) или нажатии тормоза сервопривод отпускает трос/воздействует на заслонку в сторону закрытия, уменьшая тягу двигателя.
В системах с электронной педалью газа (Drive-by-Wire) сервопривод как отдельный механический компонент часто отсутствует. Его функцию выполняет электродвигатель, встроенный непосредственно в корпус дроссельной заслонки и управляемый ЭБУ двигателя по командам от модуля круиз-контроля. Это обеспечивает еще большую точность и быстродействие.
Без надежного и точного сервопривода (или его электронного аналога в ETC) реализация автоматического поддержания постоянной скорости была бы невозможна. Он является тем самым "рукой", которая берет на себя физическое управление тягой двигателя, освобождая водителя от необходимости постоянно держать ногу на педали акселератора.
Значение электронного блока управления
Электронный блок управления (ЭБУ) является "мозгом" современной системы круиз-контроля, заменяя механические и вакуумные компоненты ранних версий. Он непрерывно обрабатывает данные от датчиков скорости, положения педали акселератора, дроссельной заслонки и сигналов тормоза, обеспечивая точное поддержание заданной скорости независимо от рельефа дороги или нагрузки на двигатель.
Используя сложные алгоритмы, ЭБУ мгновенно корректирует работу дроссельной заслонки через электропривод или посредством управления впрыском топлива. Это позволяет системе адаптироваться к изменяющимся условиям: подъёмам, спускам, встречному ветру или буксировке прицепа без участия водителя.
Ключевые функции ЭБУ в круиз-контроле
- Динамическое регулирование тяги: Расчёт необходимого крутящего момента двигателя с учётом угла наклона дороги и веса авто
- Обратная связь в реальном времени: Мониторинг фактической скорости 50 раз в секунду через датчики ABS
- Интеграция с другими системами: Взаимодействие с АКПП, ESP и системами безопасности для экстренного отключения
- Плавность работы: Предотвращение рывков при активации/деактивации через прогнозирующие алгоритмы
| Характеристика | Без ЭБУ | С ЭБУ |
| Точность поддержания скорости | ±5 км/ч | ±0.5 км/ч |
| Время реакции на подъём | 2-3 сек | 0.1-0.3 сек |
| Энергопотребление | Высокое | Оптимизированное |
Эволюция ЭБУ позволила реализовать адаптивный круиз-контроль, где микропроцессор дополнительно анализирует данные радаров и камер. Современные блоки используют нейросетевые алгоритмы для предсказания дорожной ситуации, обеспечивая не просто поддержание скорости, но и интеллектуальное управление дистанцией.
Размещение и функции органов управления
Органы управления круиз-контролем традиционно располагаются в зоне легкого доступа водителя: на мультифункциональном рулевом колесе, подрулевом рычаге или центральной консоли. Такое размещение позволяет активировать и регулировать систему без отрыва рук от руля и снижает риск потери контроля над автомобилем. В современных моделях кнопки и переключатели часто интегрированы в общую эргономику рулевого штурвала, обеспечивая интуитивное взаимодействие во время движения.
Основные элементы управления включают кнопки включения/выключения системы, установки текущей скорости, возобновления предыдущего значения, а также регулировки заданной скорости. Дополнительные функции, такие как адаптивное расстояние до впереди идущего автомобиля (в ACC), обычно управляются отдельными клавишами или колесиками. Производители стремятся к унификации пиктограмм и тактильной идентификации элементов для минимизации визуального отвлечения водителя.
| Элемент управления | Функция |
|---|---|
| ON/OFF | Активация или полное отключение системы круиз-контроля |
| SET | Фиксация текущей скорости движения как заданного значения |
| RES/+ | Возобновление сохранённой скорости / увеличение скорости на 1-2 км/ч |
| COAST/− | Снижение заданной скорости / уменьшение скорости на 1-2 км/ч |
| CANCEL | Временная деактивация без сброса запомненной скорости |
| DIST/+ (в ACC) | Регулировка дистанции до впереди идущего транспортного средства |
Как датчики скорости обеспечивают работу системы
Основой точного поддержания заданной скорости в круиз-контроле являются датчики скорости. Они непрерывно измеряют реальную скорость вращения колёс автомобиля или скорость вращения элементов трансмиссии, например, выходного вала коробки передач. Чаще всего для этой цели используются датчики Антиблокировочной Системы (ABS), которые уже установлены на большинстве современных автомобилей и работают по принципу Холла или индуктивности. Эти датчики генерируют электрический сигнал, частота которого прямо пропорциональна скорости вращения колеса.
Полученный от датчиков аналоговый или цифровой импульсный сигнал поступает в электронный блок управления (ЭБУ) двигателем или выделенный контроллер круиз-контроля. Контроллер постоянно обрабатывает этот сигнал, преобразуя частоту импульсов в конкретное числовое значение текущей скорости автомобиля в километрах или милях в час. Эта фактическая скорость становится главным входным параметром для алгоритмов работы системы.
Интеграция датчиков в систему управления
Система круиз-контроля полагается на комплекс датчиков и компонентов:
- Датчики скорости вращения колёс (ABS/ESP): Основной источник информации о текущей скорости движения.
- Датчик положения дроссельной заслонки: Информирует ЭБУ о текущем угле открытия дросселя.
- Электронный блок управления (ЭБУ) двигателя: Мозг системы, получающий данные, сравнивающий фактическую скорость с заданной и рассчитывающий необходимые управляющие воздействия.
- Привод дроссельной заслонки (электрический или вакуумный): Исполнительный механизм, который по команде ЭБУ приоткрывает или прикрывает дроссель для увеличения или уменьшения скорости.
Вот как взаимодействуют ключевые компоненты, связанные с датчиками скорости:
| Компонент | Функция в контексте скорости | Тип сигнала/Действия |
|---|---|---|
| Датчик ABS (колеса) | Измеряет скорость вращения колеса | Генерирует импульсный сигнал (частота зависит от скорости) |
| Контроллер ЭСУД | Принимает сигнал от датчиков, вычисляет текущую скорость | Преобразует частоту импульсов в км/ч или миль/ч |
| Контроллер Круиз-Контроля (часто внутри ЭСУД) | Сравнивает текущую скорость с заданной водителем | Определяет необходимость ускорения/торможения |
| Привод дросселя | Изменяет подачу топливовоздушной смеси | Регулирует положение дроссельной заслонки по сигналу ЭБУ |
Работая в замкнутом контуре, система постоянно сверяет данные о реальной скорости от датчиков с желаемой скоростью, установленной водителем. Любое отклонение, вызванное уклоном дороги, сопротивлением воздуха или изменением нагрузки, немедленно фиксируется датчиками. ЭБУ, получив эту информацию, отправляет команды на исполнительные механизмы для коррекции положения дроссельной заслонки, обеспечивая плавное и точное поддержание заданного скоростного режима.
Классический круиз-контроль: особенности
Классический круиз-контроль – это система поддержания постоянной скорости автомобиля без необходимости удерживать педаль акселератора. Водитель вручную задаёт желаемую скорость, после чего электронный блок управления (ЭБУ) автоматически регулирует подачу топлива для её сохранения. Управление осуществляется кнопками или рычагом на рулевой колонке/руле.
Основная задача устройства – снизить утомляемость водителя во время длительных поездок по магистралям с равномерным потоком транспорта. Система не влияет на работу тормозов и сцепления (в МКПП), а её активация возможна только в определённом диапазоне скоростей (обычно от 30–40 км/ч).
Ключевые технические аспекты
Работа классической системы базируется на механической связи с дроссельной заслонкой через трос или вакуумный привод. Датчики отслеживают:
- Скорость вращения колёс (через датчик скорости)
- Положение дроссельной заслонки
- Команды водителя (установка/сброс скорости, возобновление движения)
При отклонении от заданного значения (например, на подъёме) ЭБУ увеличивает подачу топлива. На спусках система не притормаживает – скорость может превысить заданную, если водитель не вмешается.
| Функция управления | Способ активации |
|---|---|
| Установка скорости | Кнопка SET/COAST при достижении нужной скорости |
| Увеличение скорости | Кнопка RES/ACCEL (кратковременно или удержание) |
| Уменьшение скорости | Кнопка SET/COAST (кратковременно или удержание) |
| Временное отключение | Нажатие тормоза или сцепления |
| Полное выключение | Кнопка OFF/CANCEL |
Ограничения классической системы: она не адаптируется к движущимся впереди объектам и не учитывает дорожный рельеф. Водитель обязан постоянно контролировать ситуацию и вручную корректировать скорость при появлении препятствий или изменении дорожных условий.
Адаптивный круиз-контроль: принципиальные отличия
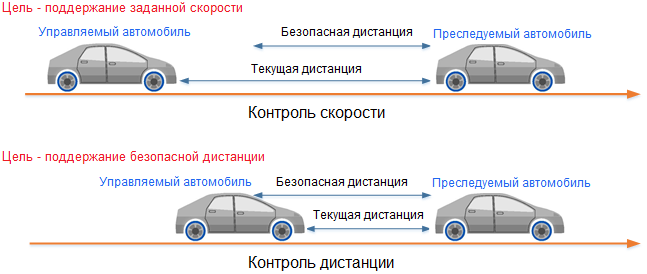
Адаптивный круиз-контроль (АСС) кардинально отличается от классической системы возможностью динамически регулировать скорость автомобиля в зависимости от дорожной обстановки. Вместо пассивного поддержания заданного водителем темпа, он непрерывно анализирует дистанцию до впереди идущего транспорта с помощью радаров, лидаров или камер, автоматически подстраивая скорость для сохранения безопасного интервала.
Ключевое технологическое отличие заключается в интеграции датчиков и активном взаимодействии с тормозной системой. Если обычный круиз-контроль управляет только дроссельной заслонкой, то АСС при необходимости задействует тормоза, плавно замедляя автомобиль без участия водителя. Это позволяет системе функционировать даже в условиях плотного потока, а не только на свободных трассах.
- Автоматическое поддержание дистанции: система самостоятельно выбирает скорость в диапазоне, установленном водителем, чтобы сохранять заданный промежуток до лидирующего ТС.
- Функция Stop-and-Go: продвинутые версии АСС способны полностью останавливать автомобиль в пробке и возобновлять движение после паузы (например, при движении в городском трафике).
- Прогнозирующее реагирование: алгоритмы анализируют не только текущую скорость объекта, но и тенденцию её изменения, заранее инициируя плавное торможение или ускорение.
Сравнение функциональных возможностей
| Критерий | Обычный круиз-контроль | Адаптивный круиз-контроль |
|---|---|---|
| Управление скоростью | Фиксированная (по заданию водителя) | Динамическая (с учётом дистанции до впереди идущих авто) |
| Использование тормозов | Не задействует | Автоматически активирует |
| Работа в городском потоке | Невозможна | Поддерживается (включая полные остановки) |
| Тип датчиков | Отсутствуют | Радар/лидар, камеры, ультразвуковые сенсоры |
Использование радаров в современных системах
Радарные датчики стали ключевым компонентом адаптивного круиз-контроля (АСС), обеспечивая непрерывный мониторинг пространства перед автомобилем. Они излучают радиоволны в миллиметровом диапазоне (часто 77 ГГц), которые отражаются от объектов и возвращаются к приемнику. Анализируя время задержки и доплеровский сдвиг частоты, система вычисляет точную дистанцию до впереди идущего транспортного средства, его скорость и относительное ускорение.
Основное преимущество радаров – всепогодная работоспособность: они эффективно функционируют в условиях тумана, сильного дождя, снегопада или ночью, где оптические камеры теряют точность. Современные радары способны отслеживать несколько объектов одновременно на дистанции до 200 метров с погрешностью менее 0.5 метра, что критически важно для безопасности.
Ключевые функции и интеграция
| Функция | Принцип работы | Преимущество |
|---|---|---|
| Поддержание дистанции | Автоматическое регулирование скорости для сохранения заданного интервала до впереди идущего авто | Снижает утомляемость водителя в пробках |
| Экстренное торможение | Предупреждение о столкновении и автономное включение тормозов при критическом сближении | Снижает риск ДТП на 20-40% |
| Stop&Go | Полная остановка и возобновление движения в заторах без вмешательства водителя | Обеспечивает комфорт в городских условиях |
Современные системы объединяют радары с камерами и лидарами в мультисенсорные платформы. Например, камеры распознают тип объекта (автомобиль, пешеход), а радар предоставляет точные метрики движения. Такая синергия позволяет реализовать функции:
- Предсказание траектории движения соседних авто
- Адаптация к изгибам дороги с помощью навигационных данных
- Распознавание пешеходов и велосипедистов в зоне риска
Анализ дистанции до впереди идущего автомобиля
Современные адаптивные системы круиз-контроля (ACC) непрерывно измеряют расстояние до движущегося впереди транспортного средства с помощью радаров или лидаров, установленных за решеткой радиатора или лобовым стеклом. Эти датчики излучают высокочастотные волны и анализируют их отражение, рассчитывая дистанцию с точностью до метра на скоростях до 180 км/ч. Полученные данные о промежутке между автомобилями передаются в электронный блок управления (ЭБУ) в режиме реального времени.
ЭБУ сопоставляет текущую дистанцию с заданной водителем величиной, которая обычно программируется через мультифункциональный руль или панель приборов. Система учитывает также относительную скорость автомобилей: если впереди идущий транспорт замедляется, ACC автоматически снижает тягу двигателя и активирует тормоза, чтобы сохранить безопасный интервал. При ускорении лидирующей машины круиз-контроль плавно возвращается к первоначально установленной скорости движения.
Ключевые алгоритмы работы

- Превентивное торможение: При резком сокращении дистанции система инициирует частичное или полное торможение до 40% от максимального усилия.
- Прогнозирование траектории: Камеры отслеживают разметку, исключая ложные срабатывания на соседние полосы.
- Градуированное ускорение: Плавный набор скорости после устранения препятствия для комфорта пассажиров.
| Тип датчика | Дальность действия | Точность в дождя |
|---|---|---|
| Радар (77 ГГц) | до 200 м | Высокая |
| Лидар | до 150 м | Снижается |
| Стереокамеры | до 100 м | Низкая |
Важно: ACC не заменяет водительский контроль – система не реагирует на статичные объекты (отбойники, остановившиеся машины) при скорости выше 30 км/ч. В мокрую погоду или туман эффективность снижается из-за поглощения сигнала водой.
Первые механические прототипы 1940-х годов
Первый работоспособный прототип круиз-контроля был создан в 1945 году американским инженером и изобретателем Ральфом Титором (Ralph Teetor). Устройство, получившее название "Speedostat", представляло собой сложную механико-пневматическую систему. Оно напрямую взаимодействовало с карбюратором или дроссельным валом двигателя с помощью системы тросов, рычагов и пневматических клапанов.
Принцип работы основывался на измерении скорости вращения карданного вала трансмиссии. Эта скорость механически преобразовывалась в давление воздуха с помощью центробежного регулятора. Давление воздействовало на диафрагму, которая через тяги и клапаны регулировала положение дроссельной заслонки: при превышении заданной скорости дроссель прикрывался, а при падении скорости - открывался. Заданную водителем скорость требовалось устанавливать вручную, используя специальный рычаг или регулятор на приборной панели.
Особенности и ограничения механических систем

- Чисто механическое управление: Отсутствие электронных компонентов делало систему независимой от электрики автомобиля, но сложной в настройке.
- Влияние уклона дороги: Система не могла адекватно компенсировать крутые подъемы или спуски, так как не учитывала нагрузку на двигатель, реагируя только на фактическую скорость вала.
- Задержка реакции: Пневматические и механические связи вносили ощутимую задержку между изменением условий движения и коррекцией дросселя.
- Сложность установки и обслуживания: Требовала трудоемкой калибровки и была чувствительна к износу механических частей.
Несмотря на ограничения, "Speedostat" стал революционным шагом, впервые предложив водителям практическую возможность автоматического поддержания скорости. Он устанавливался как опция на автомобили Chrysler Imperial (с 1958 года под названием "Auto-Pilot"), Cadillac и некоторых других марок в конце 1950-х - начале 1960-х годов, заложив фундамент для будущих электронных систем.
Ральф Титор: изобретатель современной системы
В 1945 году американский инженер Ральф Титор запатентовал устройство под названием "Speedostat", ставшее прообразом современных систем круиз-контроля. Его изобретение родилось из личного дискомфорта: частые поездки с юристом, который страдал от неумения поддерживать постоянную скорость, заставили Титора искать решение. Механизм использовал вращающийся вал, соединённый с электромагнитными клапанами, которые регулировали подачу топлива в двигатель на основе заданной водителем скорости.
Несмотря на технологическую прорывность, идея Титора столкнулась со скепсисом автопроизводителей. Крупные компании, включая Chrysler и General Motors, отвергли изобретение, считая его ненужной роскошью и отвлечением водителя. Лишь в 1958 году система, доработанная инженерами корпорации Chrysler, дебютировала на легендарном Chrysler Imperial под названием "Auto-Pilot", доказав свою жизнеспособность и заложив основу для массового внедрения.
Ключевые особенности изобретения Титора
- Механический датчик скорости: Использовал вращение карданного вала для измерения текущей скорости автомобиля.
- Электромагнитные клапаны: Корректировали положение дроссельной заслонки через вакуумный привод.
- Ручное управление: Водитель задавал скорость кнопкой на панели приборов.
| Год | Событие | Значение |
|---|---|---|
| 1945 | Патент на "Speedostat" | Официальное признание концепции |
| 1958 | Запуск "Auto-Pilot" на Chrysler Imperial | Первое коммерческое применение в серийном авто |
Устройство Титора кардинально отличалось от примитивных аналогов 1900-х годов, которые лишь фиксировали положение педали акселератора. Его система непрерывно сравнивала фактическую скорость с заданной и автоматически вносила коррективы, демонстрируя принцип обратной связи. Это позволило не только снизить утомляемость водителя в дальних поездках, но и оптимизировать расход топлива за счёт равномерного движения.
Современные адаптивные системы круиз-контроля, использующие радары и камеры, – прямое развитие идей Титора. Его патент, первоначально оценённый скептиками как "игрушка", стал фундаментом для технологий, повышающих безопасность и комфорт миллионов водителей по всему миру.
Патент 1950 года и его значение
В 1950 году американский инженер Ральф Титор получил патент US 3570622 под названием "Speed Control Device for Resisting Operation of the Accelerator". Устройство использовало электромеханическую систему, подключенную к дроссельной заслонке автомобиля. Оно анализировало скорость вращения карданного вала и автоматически регулировало подачу топлива для поддержания заданной водителем скорости, компенсируя изменения рельефа дороги.
Значение изобретения Титора заключалось в создании первого работоспособного прототипа круиз-контроля. Хотя система требовала ручной активации при каждом изменении скорости и не имела электронных компонентов, её принцип лёг в основу всех последующих разработок. Патент доказал техническую возможность автоматизации управления скоростью, что стало ключевым шагом для автопрома.
Ключевые особенности патента
- Механическая обратная связь: Использование спидометра и тросов для контроля положения дросселя
- Ручное управление: Водитель физически нажимал кнопку на панели для фиксации текущей скорости
- Ограниченная адаптивность: Система реагировала только на значительные отклонения скорости (более 5 км/ч)
| Технологический прорыв | Ограничения реализации |
|---|---|
| Доказана концепция автоматического поддержания скорости | Отсутствие функции памяти после выключения двигателя |
| Механическая устойчивость к вибрациям | Несовместимость с автоматическими коробками передач |
Коммерческое применение разработки началось лишь через 8 лет, когда Chrysler интегрировал усовершенствованную версию в модель Imperial 1958 года. Доработки инженеров компании устранили главный недостаток системы Титора – необходимость постоянного ручного контроля. Новый блок управления позволял водителю деактивировать круиз-контроль легким касанием тормоза, что стало отраслевым стандартом.
Дебют в серийных автомобилях (1958 Chrysler Imperial)
В 1958 году компания Chrysler произвела настоящую революцию, представив первую в мире серийную систему круиз-контроля на своей флагманской модели Imperial. Устройство, получившее маркетинговое название "Auto-Pilot", стало доступно в качестве дорогостоящей опции за $226 (что эквивалентно примерно $2300 сегодня). Это был не просто прототип или ограниченная серия, а реальная технология, которую мог заказать любой покупатель нового Imperial.
Система "Auto-Pilot" Ральфа Титора была исключительно механической и электромеханической. Она не имела ничего общего с современной электроникой. Управление скоростью осуществлялось через сложную сеть тросов, соединенных с карбюратором и трансмиссией. Водитель задавал желаемую скорость с помощью рычага на приборной панели. Система использовала вакуум двигателя (через вакуумный сервопривод) и данные от вращающегося троса спидометра для поддержания выбранной скорости. Для отключения достаточно было нажать на тормоз.
Особенности и ограничения первой системы
Несмотря на инновационность, система Chrysler Imperial имела характерные особенности и ограничения:
- Механическое управление: Отсутствие электронных датчиков и процессоров делало систему менее точной и более подверженной влиянию износа и внешних условий.
- Вакуумный привод: Зависимость от вакуума двигателя означала, что система могла терять эффективность при резких маневрах или на подъемах, где вакуум падал.
- Отсутствие "резюме": После отключения тормозом или сцеплением, водителю нужно было заново вручную разогнаться до нужной скорости и активировать систему.
- Ручное отключение: Основным способом деактивации было нажатие на тормоз; отдельной кнопки для временного отключения не существовало.
| Аспект | Chrysler Imperial "Auto-Pilot" (1958) | Современные Системы |
|---|---|---|
| Технологическая основа | Механическая, электромеханическая, вакуумный привод | Электронная (микропроцессоры, датчики скорости, электронный дроссель) |
| Точность поддержания скорости | Умеренная, зависела от условий | Высокая, адаптивная (с учетом уклона) |
| Функция "Resume" | Отсутствовала | Присутствует практически всегда |
| Интеграция с другими системами | Отсутствовала | Часто интегрирована с АБС, ESP, двигателем, трансмиссией |
Несмотря на примитивность по современным меркам, дебют круиз-контроля на Chrysler Imperial в 1958 году стал знаковым событием. Он доказал техническую осуществимость идеи и открыл путь для ее последующего совершенствования. Хотя массовое распространение более надежных электронных систем началось лишь десятилетия спустя, именно Imperial показал миру потенциал автоматического поддержания скорости, заложив фундамент для одной из самых востребованных функций комфорта в современных автомобилях.
Распространение технологии в 1970-х годах
После дебюта системы на Chrysler Imperial в 1958 году, круиз-контроль долгое время оставался эксклюзивной опцией для премиальных моделей из-за высокой стоимости и сложности электромеханических компонентов. Ситуация начала меняться в начале 1970-х, когда американские автопроизводители, столкнувшись с нефтяным кризисом и ужесточением экологических норм, искали способы повысить привлекательность своих автомобилей. Технология стала рассматриваться как инструмент для улучшения топливной экономичности за счет поддержания стабильной скорости.
Ключевым фактором массового внедрения стало появление интегральных микросхем и электронных датчиков, заменивших громоздкие вакуумные приводы и механические регуляторы. General Motors первой отреагировала на этот тренд, предложив в 1974 году электронную версию круиз-контроля на Oldsmobile Toronado. Система использовала электродвигатель для управления дроссельной заслонкой через трос и микропроцессор для обработки данных о скорости, что повысило надежность и снизило цену.
Основные этапы развития в 1970-е
К концу десятилетия технология стала стандартом для среднего ценового сегмента в США:
- 1976 год: Cadillac внедряет систему с функцией "памяти" последней установленной скорости после торможения.
- 1978 год: Chrysler представляет электронный блок управления с диагностическим режимом для сервисного обслуживания.
- Европейское проникновение: Mercedes-Benz S-Class (W116) и BMW 7 серии (E23) включают адаптированные версии системы, фокусируясь на плавности работы.
| Производитель | Модель | Год | Инновация |
| Oldsmobile | Toronado | 1974 | Первое серийное использование электронного управления |
| Cadillac | Eldorado | 1976 | Функция возобновления скорости после торможения |
| Toyota | Corona | 1977 | Первая массовая японская модель с круиз-контролем |
Японские бренды, такие как Toyota и Nissan, начали предлагать систему на флагманских седанах к середине десятилетия, используя партнерство с поставщиками электроники. Это стимулировало конкуренцию и дальнейшее удешевление компонентов. К 1979 году круиз-контроль присутствовал уже в 70% новых автомобилей высшего сегмента в США и 30% – в Европе, став символом технического прогресса и комфорта.
Переход на электронное управление в 1990-х
До 1990-х годов круиз-контроль преимущественно использовал механические и вакуумные системы для управления дроссельной заслонкой. Эти конструкции были относительно простыми, но имели ограниченную точность и функциональность, а также зависели от физических соединений и разрежения во впускном коллекторе.
Широкое внедрение электронных блоков управления (ЭБУ) двигателем в 1990-х годах кардинально изменило принцип работы круиз-контроля. Производители начали интегрировать его функции непосредственно в ЭБУ, заменив тросы и вакуумные сервоприводы на электронные сигналы и электродвигатели, управляющие положением дросселя.
Ключевые изменения и преимущества электронных систем
Электронный круиз-контроль обеспечил значительные улучшения:
- Повышенная точность: ЭБУ мгновенно обрабатывает данные датчиков скорости, положения дросселя и нагрузки двигателя, обеспечивая стабильное поддержание заданной скорости даже на подъемах и спусках.
- Интеграция с другими системами: Функция стала частью общей электронной архитектуры автомобиля, что позволило реализовать взаимодействие с АБС, трансмиссией (переключение передач при активации) и диагностическими системами.
- Расширенные функции: Появились кнопки управления на руле, память скорости, плавный разгон/замедление и функция быстрого возобновления последней заданной скорости (Resume).
- Надежность: Устранение вакуумных линий и механических тяг снизило риск утечек и поломок компонентов.
Этот переход создал технологическую базу для развития адаптивного круиз-контроля (ACC), который появился в конце 1990-х и использовал радары или камеры для автоматического регулирования скорости в зависимости от дистанции до впереди идущего автомобиля.
Появление адаптивных систем в начале 2000-х
Ключевым этапом эволюции стал переход от пассивного круиз-контроля к адаптивному (ACC – Adaptive Cruise Control). Эта технология впервые серийно появилась в 1999 году на Mercedes-Benz S-класса (система Distronic), а к середине 2000-х её внедрили BMW, Toyota, Lexus и Audi. ACC использовала радарные или лидарные датчики для сканирования пространства перед автомобилем.
Система анализировала дистанцию до впереди идущего транспорта и его скорость, автоматически регулируя скорость машины: притормаживала при сближении и разгонялась при освобождении полосы. Ранние версии функционировали в диапазоне 30–180 км/ч, но не могли полностью остановить автомобиль.
Технологические прорывы и преимущества ACC
- Радарные сенсоры (24 ГГц, позже 77 ГГц) обеспечивали точное измерение дистанции независимо от погодных условий.
- Интеграция с ESP и ABS позволяла системе задействовать тормозные механизмы для плавного снижения скорости.
- Функция Stop&Go (появилась у BMW в 2006 г.) добавила поддержку движения в пробках с полными остановками.
Главным преимуществом ACC стало снижение нагрузки на водителя в потоке: система брала на контроль поддержание безопасной дистанции, минимизируя риск столкновения из-за невнимательности. Это заложило основу для будущих автономных систем.
| Производитель | Первая модель с ACC | Год выпуска | Особенности |
|---|---|---|---|
| Mercedes-Benz | S-Class (W220) | 1999 | Радарный датчик, работа от 30 км/ч |
| Toyota | Celsior (Lexus LS) | 2001 | Лазерный сенсор, предупреждение о столкновении |
| BMW | 7 Series (E65) | 2002 | Двойной радар, прогнозирование траектории |
Интеграция с системами безопасности автомобиля

Современный круиз-контроль, особенно адаптивный (ACC), не существует изолированно, а глубоко интегрирован в электронную архитектуру автомобиля. Он постоянно обменивается данными с датчиками (радарами, лидарами, камерами), блоком управления двигателем и тормозной системой, формируя единый комплекс активной безопасности. Эта связь позволяет системе не просто поддерживать скорость, а динамично реагировать на изменения дорожной обстановки в реальном времени, используя информацию от соседних систем.
Ключевая роль интеграции проявляется в предотвращении аварий: при угрозе столкновения ACC мгновенно получает данные от системы экстренного торможения (AEB) и автоматически снижает скорость или останавливает автомобиль. Параллельно он взаимодействует с антиблокировочной системой тормозов (ABS) и системой стабилизации (ESP), обеспечивая курсовую устойчивость при резком маневрировании или торможении в сложных условиях, например, на мокром асфальте.
Примеры синергии с системами безопасности
- Экстренное торможение (AEB): ACC передает данные о дистанции и скорости препятствия, активируя автономное торможение при бездействии водителя.
- Система стабилизации (ESP): Корректирует вектор тяги и подтормаживает колеса, если ACC работает на скользкой дороге или в повороте.
- Мониторинг "слепых" зон: Предупреждает ACC о машинах в соседних рядах, предотвращая опасные перестроения при плавном изменении скорости.
- Распознавание дорожных знаков: Автоматически ограничивает максимальную скорость круиз-контроля согласно знакам, считанным камерой.
Пошаговая активация круиз-контроля
Активация системы зависит от модели автомобиля, но общий алгоритм универсален. Убедитесь, что движение происходит по сухой прямой дороге с минимальным трафиком. Основные элементы управления всегда расположены на рулевом колесе или подрулевых переключателях.
Перед включением разгонитесь до желаемой скорости (обычно от 40 км/ч). Никогда не активируйте систему в сложных погодных условиях, на обледенелом покрытии или горных серпантинах – сохраняйте полный контроль над авто.
Инструкция по активации
- Наберите целевую скорость (например, 90 км/ч на трассе)
- Нажмите главную кнопку ON/OFF (символ спидометра со стрелкой) – на приборке загорится белый индикатор
- Зафиксируйте скорость кнопкой SET (или SET−) – индикатор станет зеленым
- Для корректировки используйте:
- RES/+ – увеличение скорости (+1 км/ч за клик)
- SET/− – снижение скорости
| Действие | Результат |
|---|---|
| Нажатие тормоза/сцепления | Временное отключение (память скорости сохраняется) |
| Кнопка RES после отключения | Восстановление последней заданной скорости |
| Долгое удержание OFF | Полное выключение системы |
Важно: В моделях с адаптивным круиз-контролем дополнительно регулируется дистанция до впереди идущего ТС кнопкой DISTANCE. Значок автомобиля с волнами на панели указывает активный режим следования.
Предупреждение: Система деактивируется при падении скорости ниже 30 км/ч. Всегда держите руки на руле – круиз-контроль не реагирует на пешеходов, дорожные препятствия или резкие изменения траектории.
Способы изменения заданной скорости
Водитель может временно увеличить скорость, нажав педаль акселератора. После отпускания педали система автоматически возвращается к исходному заданному значению, если не было выполнено других манипуляций с управлением круиз-контроля.
Для постоянного изменения установленного скоростного режима используются органы управления на руле или подрулевых лепестках. Основные методы включают:
Кнопочное регулирование
- Кнопки "+" и "−": Кратковременное нажатие изменяет скорость на 1-2 км/ч, длительное удержание – на 5-10 км/ч
- Колесико: Плавное вращение для точной настройки с шагом 1 км/ч
Альтернативные методы
- Педаль тормоза: Полностью отключает систему при любом нажатии
- Рычаг SET/COAST: Кратковременное движение вниз уменьшает скорость, повторное нажатие после отключения восстанавливает последнее значение
- Адаптивный круиз-контроль: Автоматически снижает скорость при обнаружении медленных транспортных средств впереди
| Действие | Результат |
|---|---|
| Нажатие RESUME | Возврат к последней сохранённой скорости после торможения |
| Удержание SET+ | Автоматический разгон до нового значения с шагом 5 км/ч |
В продвинутых системах изменение скорости возможно голосовыми командами или через сенсорные панели. При любом ручном вмешательстве (педаль газа/тормоза) электроника сохраняет заданный параметр в памяти до повторной активации.
Методы временного отключения системы
Круиз-контроль спроектирован таким образом, чтобы водитель мог легко и быстро его деактивировать в любой момент, когда этого требует дорожная ситуация или его собственное желание взять управление скоростью полностью под свой контроль. Временное отключение не выводит систему из строя, а лишь приостанавливает ее работу, сохраняя в памяти установленное значение заданной скорости.
Основные методы временной деактивации круиз-контроля интуитивно понятны и связаны с действиями, которые водитель выполняет естественным образом при необходимости замедлиться или маневрировать. Эти действия являются стандартными для большинства автомобилей, хотя расположение управляющих кнопок может незначительно варьироваться.
Способы временной деактивации
Водитель может временно приостановить работу круиз-контроля одним из следующих способов:
- Нажатие педали тормоза: Это самый распространенный и естественный способ. Любое, даже легкое, нажатие на педаль тормоза мгновенно отключает круиз-контроль. Система интерпретирует это как необходимость снизить скорость.
- Нажатие педали сцепления (на автомобилях с МКПП): На машинах с механической коробкой передач выжим сцепления также приводит к временному отключению системы. Это связано с разрывом связи между двигателем и ведущими колесами.
- Использование кнопки отмены: Практически все системы оснащены специальной кнопкой, обычно обозначенной как "Cancel", "Отмена" или символом разорванного круга/стрелки. Нажатие этой кнопки приостанавливает работу круиз-контроля без стирания заданной скорости из памяти.
- Кратковременное нажатие кнопки "Set/Coast" или "-": На некоторых моделях автомобилей кратковременное нажатие кнопки уменьшения скорости (часто обозначенной как "Set-", "Coast" или просто "-") также может служить для отмены текущей установки.
- Активация стояночного тормоза (в некоторых системах): На части автомобилей включение ручного (стояночного) тормоза может привести к отключению круиз-контроля.
- Срабатывание систем активной безопасности (для АСС): В адаптивном круиз-контроле (АСС) система автоматически приостановит свою работу (и часто начнет торможение), если ее радар или камера обнаружат впереди идущее транспортное средство, замедляющееся ниже заданной скорости, или другое препятствие, требующее снижения скорости.
После временного отключения любым из этих методов ранее заданная скорость обычно сохраняется в памяти системы. Чтобы возобновить движение с сохраненной скоростью, водителю достаточно нажать кнопку "Resume" ("Возобновить") или "Accel" ("+"), когда дорожная ситуация снова станет подходящей.
Важное отличие: Следует различать временное отключение (приостановка с сохранением скорости в памяти) и полное выключение системы (обычно выполняется главной кнопкой "On/Off" или "Cruise"), которое стирает заданную скорость из памяти. Временное отключение позволяет быстро вернуться к комфортному крейсерскому режиму без необходимости заново устанавливать желаемую скорость.
| Действие | Результат | Сохранение скорости в памяти | Восстановление скорости кнопкой "Resume" |
|---|---|---|---|
| Нажатие тормоза/сцепления/Cancel | Временное отключение | Да | Да |
| Нажатие кнопки "On/Off" / "Cruise" | Полное выключение системы | Нет | Нет |
| Выключение зажигания | Полное выключение системы | Нет | Нет |
Экономия топлива при равномерном движении
Круиз-контроль обеспечивает стабильную скорость движения автомобиля без постоянного вмешательства водителя в управление дроссельной заслонкой. Это исключает резкие ускорения и замедления, характерные для "рваного" стиля езды, когда двигатель вынужден работать в неоптимальных режимах с повышенным расходом топлива.
Поддерживая постоянные обороты двигателя, система минимизирует цикличные перегрузки и предотвращает скачкообразный рост потребления горючего. Особенно заметен эффект экономии на трассах с ровным рельефом, где круиз-контроль способен поддерживать идеально равномерное движение в течение длительного времени.
Механизм снижения расхода
- Оптимизация нагрузки: Двигатель работает в узком диапазоне оборотов с максимальным КПД
- Исключение перегазовок: Отсутствие резкого нажатия педали акселератора
- Снижение аэродинамических потерь: Постоянная скорость минимизирует сопротивление воздуха
| Режим движения | Расход топлива* | Колебания скорости |
| С круиз-контролем | ↓ 5-12% | ± 2-3 км/ч |
| Без системы | Базовая норма | ± 10-15 км/ч |
*Средние данные для скоростей 80-100 км/ч на ровной трассе
Современные адаптивные системы дополнительно учитывают рельеф местности, заранее снижая скорость перед подъемами и используя инерцию на спусках. Такой алгоритм обеспечивает до 15% экономии по сравнению с ручным управлением в холмистой местности.
Снижение усталости водителя в дальних поездках
Круиз-контроль минимизирует физическую нагрузку, освобождая водителя от необходимости постоянно удерживать педаль газа. Это предотвращает онемение ног и снижает мышечное напряжение в длительных поездках, особенно на трассах с однообразным рельефом.
Устройство поддерживает заданную скорость без колебаний, что устраняет необходимость частой коррекции акселератора. Водитель может принять более расслабленную позу, сосредоточив внимание на дорожной обстановке, а не на контроле спидометра.
Ключевые аспекты влияния на утомляемость
- Стабильность движения: Отсутствие микро-коррекций скорости снижает когнитивную нагрузку
- Эргономика: Возможность менять положение тела без риска изменения скорости
- Концентрация: Перераспределение внимания на дорожные hazards (препятствия, знаки)
| Без круиз-контроля | С круиз-контролем |
|---|---|
| Постоянное мышечное напряжение в правой ноге | Физическая релаксация с возможностью смены позы |
| Усталость от монотонного контроля скорости | Снижение ментальной утомляемости на 25-40% (исследования NHTSA) |
Важно: Эффект проявляется преимущественно на магистралях – в городском потоке система требует постоянного переключения режимов, что может давать обратный эффект.
Предотвращение случайного превышения скорости
Круиз-контроль исключает необходимость постоянного давления на педаль газа, минимизируя риск непреднамеренного набора скорости из-за усталости ноги или невнимательности. Система строго поддерживает заданный водителем предел, автоматически корректируя мощность двигателя при изменении уклона дороги или нагрузки.
При активации функции электроника непрерывно сопоставляет фактическую скорость с целевым значением, мгновенно реагируя на малейшие отклонения. Это особенно эффективно на длительных прямых участках трассы, где монотонность движения снижает концентрацию.
Ключевые механизмы защиты

- Автоматическое торможение двигателем при движении под уклон без участия водителя
- Блокировка ускорения при попытке превысить заданный лимит (кроме экстренных ситуаций с полным выжимом педали газа)
- Визуальные и звуковые оповещения при несоответствии скорости установке
| Ситуация | Реакция системы |
|---|---|
| Снижение уклона дороги | Уменьшение подачи топлива |
| Увеличение встречного ветра | Корректировка угла открытия дросселя |
| Непроизвольный нажим на акселератор | Игнорирование команды до полного отпускания педали |
Современные адаптивные системы дополняют базовую функцию анализом дистанции до впереди идущего транспорта, принудительно снижая скорость при сближении. Технология особенно полезна в зонах с частым изменением разрешённого предела, где водитель может не успеть среагировать на новые дорожные знаки.
Статистически автомобили с круиз-контролем реже фиксируются в нарушениях скоростного режима на автомагистралях – электроника обеспечивает точность, недостижимую при ручном управлении. Система компенсирует человеческий фактор: потерю бдительности, замедленную реакцию или неверную оценку текущей скорости по спидометру.
Ограничения использования в сложных условиях
Круиз-контроль не адаптируется к изменяющимся дорожным условиям, что создаёт риски при плохой погоде. На мокром асфальте, снегу или гололёде система сохраняет заданную скорость, игнорируя снижение сцепления колёс. Это провоцирует пробуксовку при разгоне или блокировку тормозов при замедлении, увеличивая риск заноса.
На горных серпантинах или крутых спусках устройство не учитывает перепады высот. При движении под уклон система продолжает подавать топливо для поддержания скорости, что приводит к опасному разгону. Водитель вынужден постоянно отключать круиз-контроль и переходить на ручное торможение, нивелируя преимущества автоматизации.
Ключевые ограничения:
- Городское движение: Не реагирует на внезапные остановки транспорта, светофоры или пешеходов.
- Плотный трафик: Не поддерживает динамическое изменение дистанции до впереди идущего ТС.
- Извилистые дороги: Отсутствует автоматическое снижение скорости перед поворотами.
| Условие | Риск | Рекомендация |
| Сильный дождь/туман | Аквапланирование, потеря видимости | Полное отключение системы |
| Грунтовые дороги | Непредсказуемые препятствия | Использовать только на прямых участках |
| Обледеневшее покрытие | Потеря контроля при торможении | Ручное управление скоростью |
Важное отличие от адаптивного круиз-контроля: базовые системы лишены датчиков расстояния и камер, не распознают препятствия. Эксплуатация допустима исключительно на свободных магистралях с идеальным покрытием и видимостью.
Будущее: интеграция с автопилотом
Современный адаптивный круиз-контроль (ACC) стал фундаментом для развития автономного вождения, эволюционируя от поддержки скорости до управления продольным и поперечным движением автомобиля. Благодаря сочетанию радаров, лидаров, камер и ультразвуковых датчиков системы научились строить 3D-карту окружения, предсказывать поведение других участников движения и принимать сложные решения в реальном времени.
Интеграция с автопилотом подразумевает переход от ассистирующих функций к полноценному управлению ТС без вмешательства водителя на определённых участках дороги. Ключевую роль здесь играет глубокое машинное обучение: нейросети анализируют терабайты данных с тестовых полигонов и реальных поездок, совершенствуя алгоритмы распознавания пешеходов, дорожных знаков и экстренных ситуаций.
Перспективы и технологические тренды
Развитие направлено на достижение 5-го уровня автономности, где человеческое участие исключено полностью. Основные векторы:
- V2X-коммуникация: обмен данными между автомобилями и инфраструктурой (светофоры, дорожные датчики) для оптимизации маршрутов
- Использование HD-карт с сантиметровой точностью для позиционирования
- Дублирование сенсоров и вычислительных модулей для обеспечения отказоустойчивости
| Преимущество | Технология | Эффект |
|---|---|---|
| Снижение аварий | 360° мониторинг + ИИ | Предотвращение 94% ДТП по вине человека |
| Энергоэффективность | Сетевое взаимодействие | Оптимизация расхода топлива/электричества до 15% |
| Комфорт | Полный автопилот | Возможность работы/отдыха в салоне |
Ключевой вызов – обеспечение кибербезопасности и юридическое регулирование. Производители внедряют криптозащиту каналов связи, а законодатели разрабатывают международные стандарты ответственности для автономных систем. Пионерами стали Tesla Autopilot, Mercedes Drive Pilot и GM Super Cruise, чьи решения уже поддерживают 3-4 уровень автономности на хайвеях.
Список источников
При подготовке материала использовались специализированные автомобильные издания, техническая документация производителей и исторические обзоры развития автомобильных технологий.
Ключевые источники информации включают научные публикации, отраслевые исследования и официальные данные компаний-разработчиков.
- Монография: "Автомобильные электронные системы управления" (Иванов А.В., издательство "Транспорт", 2020)
- Научная статья: "Эволюция систем автоматизации вождения" (Журнал "Автомобильная промышленность", №3, 2019)
- Технический отчет: "История разработки адаптивного круиз-контроля" (Robert Bosch GmbH, 2018)
- Отраслевое исследование: "Безопасность и эффективность современных систем помощи водителю" (НАМИ, 2021)
- Энциклопедия: "Автомобильные инновации XX века" (под ред. Смирнова П.К., раздел "Автопилоты")
- Патентная документация: US 3570622 A "Speed control device for motor vehicles" (R. Teetor, 1971)
- Официальные материалы: Технические бюллетени Mercedes-Benz по системе "Tempomat" (архив компании)