Система ESP - разбираем её функции для безопасности
Статья обновлена: 01.03.2026
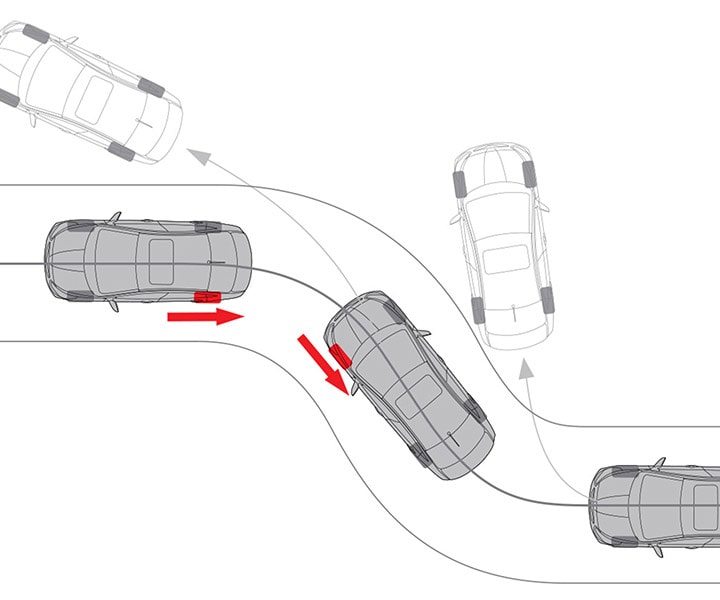
Система курсовой устойчивости стала обязательным элементом современных автомобилей, спасая жизни водителей по всему миру.
ESP (Electronic Stability Program) – электронный "ангел-хранитель", предотвращающий занос и потерю управления при резких манёврах или на скользкой дороге.
Разберём принцип работы этой технологии, её ключевые компоненты и ситуации, когда вмешательство электроники критически важно для безопасности.
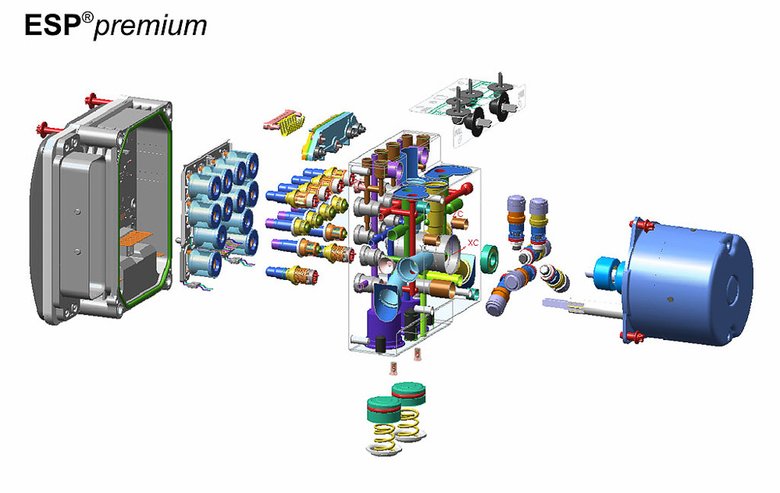
Основные компоненты системы: датчики и исполнительные устройства
Система ESP использует набор высокоточных датчиков, непрерывно отслеживающих поведение автомобиля и действия водителя. Ключевые из них включают датчик угла поворота руля, датчики скорости вращения колес (общие с ABS), гироскоп для измерения угловой скорости вокруг вертикальной оси и акселерометр, фиксирующий поперечное ускорение кузова.
На основе анализа данных от датчиков электронный блок управления (ЭБУ) активирует исполнительные устройства для коррекции траектории. Главными исполнительными элементами являются гидравлический модулятор тормозной системы и блок управления двигателем, которые физически воздействуют на колеса и силовой агрегат.
Ключевые датчики ESP:
- Датчик угла поворота руля: Определяет направление, заданное водителем.
- Датчики скорости вращения колес: Фиксируют фактическую скорость каждого колеса.
- Гироскоп (датчик рыскания): Измеряет угловую скорость вращения авто вокруг вертикальной оси.
- Акселерометр: Контролирует боковое ускорение при поворотах и заносах.
Исполнительные устройства:
- Гидравлический модулятор: Создает давление в тормозных контурах отдельных колес по команде ЭБУ.
- Блок управления двигателем: Снижает крутящий момент при риске потери устойчивости.
| Компонент | Функция |
|---|---|
| ЭБУ ESP | Анализирует данные датчиков 500 раз/сек и вычисляет необходимые корректирующие воздействия |
| Датчик поперечного ускорения | Фиксирует силу инерции при боковом смещении кузова |
Роль датчика угла поворота руля в определении намерений водителя
Датчик угла поворота рулевого колеса непрерывно измеряет величину и скорость отклонения руля от нейтрального положения. Эти параметры являются прямым электронным отражением действий водителя: резкий поворот влево указывает на попытку избежать препятствие, плавное вращение вправо – на запланированный маневр, а малые колебания корректируют траекторию на прямой.
ЭБУ ESP сопоставляет данные с датчика руля с информацией от сенсоров вращения колес, акселерометра и гироскопа. Если фактическое движение автомобиля (например, степень поворота или заноса) не соответствует углу, заданному рулевым управлением, система идентифицирует потерю контроля и активирует протоколы стабилизации.
Ключевые функции в работе ESP
Датчик руля выполняет три критические задачи:
- Определение целевой траектории: угол поворота преобразуется в расчетный вектор движения, который должен соблюдаться при нормальных условиях.
- Оценка агрессивности маневра: скорость изменения угла показывает, требуется ли экстренное вмешательство (резкий поворот) или коррекция плавная.
- Верификация действий водителя: при активации ESP датчик подтверждает, что водитель сохраняет управление (руль повернут), а не отказался от контроля (руль прямо при заносе).
| Параметр датчика | Влияние на решение ESP |
|---|---|
| Угол отклонения | Определяет требуемый радиус поворота |
| Скорость вращения | Оценивает срочность маневра |
| Направление | Задает вектор для коррекции траектории |
Без точных данных от этого датчика ESP не сможет отличить запланированный поворот от неконтролируемого заноса, что сделает работу системы либо бесполезной, либо опасной.
Датчики скорости вращения колес: контроль фактического движения
Датчики скорости вращения колес (ABS-сенсоры) установлены на ступицах каждого колеса и непрерывно фиксируют реальную скорость их вращения. Эти данные передаются в электронный блок управления ESP с высокой частотой, формируя точную картину поведения автомобиля в каждый момент времени.
Система сопоставляет показания всех четырех датчиков, вычисляя не только скорость движения, но и разницу в угловой скорости между колесами. Любое расхождение (например, внезапное ускорение одного из ведущих колес или замедление при торможении) мгновенно интерпретируется как потеря сцепления с дорожным покрытием.
Принципы работы и реакция ESP
| Тип отклонения | Физическое явление | Действие ESP |
|---|---|---|
| Буксование колеса | Резкое ускорение вращения ведущего колеса относительно других | Короткое подтормаживание колеса + снижение крутящего момента двигателя |
| Блокировка колеса | Замедление вращения при торможении относительно оси | Сброс давления в тормозном контуре (как в ABS) |
| Разная скорость вращения по осям | Признак начинающегося заноса или сноса | Избирательное торможение конкретных колес для стабилизации |
Ключевые особенности датчиков:
- Типы сенсоров: активные (на эффекте Холла) и пассивные (индуктивные), где активные обеспечивают точность даже на минимальных скоростях
- Синхронизация: данные сопоставляются с показаниями датчика угла поворота руля и акселерометром
- Диагностика: при отказе одного датчика ESP отключается, активируя сигнал на приборной панели
Датчик поперечного ускорения: замер бокового смещения
Этот датчик фиксирует центробежную силу, возникающую при поворотах автомобиля. Он определяет фактическое поперечное (латеральное) ускорение, измеряемое в метрах на секунду в квадрате (м/с²) или в g-силах. Чем резче манёвр или выше скорость в повороте, тем сильнее воздействие боковых сил на кузов.
Датчик работает по принципу микроэлектромеханической системы (MEMS). Внутри него находится инерционная масса на упругих подвесах. При боковом смещении масса отклоняется от нейтрального положения, а встроенные пьезорезистивные или ёмкостные элементы преобразуют это смещение в электрический сигнал.
Как данные используются ESP
Контроллер ESP непрерывно сравнивает показания датчика поперечного ускорения с ожидаемыми значениями, рассчитанными на основе:
- Угла поворота рулевого колеса (от датчика руля)
- Скорости движения (от датчиков ABS)
- Индивидуальной скорости вращения колёс
Если реальное боковое ускорение превышает расчётный безопасный порог (например, при заносе или сносе), блок управления ESP:
- Определяет, какое колесо нуждается в коррекции
- Моментально притормаживает его через гидравлический модулятор
- При необходимости снижает крутящий момент двигателя
| Показания датчика | Реакция ESP |
| Ускорение ниже расчётного | Без вмешательства |
| Резкий рост ускорения | Активация тормозов внешних колёс |
| Колебания ускорения | Коррекция заноса импульсным торможением |
Точность измерений критична для раннего распознавания потери устойчивости. Датчик калибруется при включении зажигания и устойчив к вибрациям благодаря фильтрации сигнала. Располагается обычно возле центра масс автомобиля – под центральным тоннелем или сиденьем водителя.
Гиродатчик рыскания: отслеживание вращения кузова
Гиродатчик рыскания, также известный как датчик угловой скорости или Yaw Rate Sensor, является центральным элементом системы ESP. Он установлен в центре кузова автомобиля, обычно под центральным тоннелем или в районе рычага ручного тормоза. Его ключевая задача – точно измерять угловую скорость вращения автомобиля вокруг его вертикальной оси (Z-оси), то есть фиксировать, насколько быстро и в какую сторону (влево или вправо) разворачивается кузов в горизонтальной плоскости при маневрах.
Датчик работает на основе микроэлектромеханической системы (МЭМС) или вибрирующих элементов. Внутри чувствительного элемента происходят микроскопические колебания. При вращении автомобиля возникает сила Кориолиса, которая отклоняет эти колебания пропорционально скорости вращения. Электроника датчика преобразует это механическое отклонение в электрический сигнал, который непрерывно передается в электронный блок управления (ЭБУ) ESP.
Принцип работы и взаимодействие с ESP

ЭБУ ESP постоянно сравнивает показания гиродатчика рыскания с ожидаемым поведением автомобиля, рассчитанным на основе:
- Угла поворота рулевого колеса (от датчика руля)
- Скорости вращения каждого колеса (от датчиков ABS)
- Поперечного ускорения (от акселерометра)
Если реальное вращение кузова (от гиродатчика) не соответствует расчетному значению, ЭБУ распознает начало опасной ситуации:
- Избыточная поворачиваемость (занос задней оси): Кузов вращается в сторону поворота быстрее, чем нужно. ESP притормаживает внешнее переднее колесо и/или снижает крутящий момент двигателя.
- Недостаточная поворачиваемость (снос передней оси): Кузов вращается медленнее, чем требуется для заданного рулевого угла. ESP притормаживает внутреннее заднее колесо для создания стабилизирующего момента.
Таким образом, гиродатчик рыскания предоставляет ЭБУ ESP критическую информацию о фактической динамике автомобиля. Без его точных данных система не смогла бы вовремя обнаружить и компенсировать потерю устойчивости, вызванную вращением кузова вокруг вертикальной оси.
Как блок управления ESP обрабатывает данные в реальном времени
Блок управления ESP (электронной системы стабилизации) непрерывно получает потоки информации от множества датчиков автомобиля. Частота опроса датчиков составляет десятки или даже сотни раз в секунду, что обеспечивает мгновенную реакцию системы на изменение дорожной ситуации. Основные источники данных включают датчики скорости вращения колес (через систему ABS), гироскоп (фиксирующий угловую скорость вокруг вертикальной оси), акселерометр (измеряющий поперечное ускорение), датчик угла поворота руля и датчик давления в тормозной системе.
Специализированные алгоритмы в реальном времени сравнивают фактическое поведение автомобиля с расчетной моделью движения, заданной водителем через рулевое колесо и педали. Система вычисляет разницу между желаемой траекторией (на основе угла поворота руля и скорости) и реальными показателями (рыскание, боковое ускорение, разница скоростей колес). Любое несоответствие интерпретируется как потеря устойчивости – например, избыточная или недостаточная поворачиваемость.
Алгоритм обработки данных
- Мониторинг параметров: Постоянное чтение сигналов от всех датчиков с частотой 25-100 Гц.
- Расчет эталонной модели: Определение ожидаемого вектора движения на основе:
- Угла поворота рулевого колеса
- Скорости автомобиля (по среднему значению вращения колес)
- Положения педали акселератора/тормоза
- Сравнение и диагностика: Анализ отклонений фактических показателей (рыскание, ускорение) от расчетных. Выявление типа и степени потери устойчивости.
- Формирование корректирующего воздействия: Расчет необходимого подтормаживания отдельных колес и/или снижения крутящего момента двигателя.
- Исполнение команд: Мгновенная отправка сигналов:
- К модуляторам тормозных усилий (клапанам ABS)
- В блок управления двигателем (ECU) для снижения мощности
| Датчик | Данные | Влияние на решение ESP |
|---|---|---|
| Датчики ABS | Скорость вращения каждого колеса | Выявление проскальзывания, расчет фактической скорости авто |
| Гироскоп | Скорость рыскания (°/сек) | Фиксация начала заноса или сноса |
| Акселерометр | Поперечное ускорение (g) | Оценка силы бокового скольжения |
| Датчик руля | Угол/скорость поворота | Определение намерений водителя |
| Датчик тормозов | Давление в контуре | Учет активного торможения водителем |
Ситуации срабатывания: потеря сцепления и уход с траектории
Система стабилизации активируется при неконтролируемом скольжении колес, когда сила трения покрытия недостаточна для реализации управляющих воздействий водителя. Это происходит при резком изменении направления движения, экстренном торможении на разнородных поверхностях или нерасчетных скоростях прохождения поворотов. Датчики фиксируют рассогласование между фактической траекторией и углом поворота руля.
Уход с заданной траектории возникает при превышении физических возможностей сцепления шин с дорогой. ESP вычисляет вектор движения и определяет, какие колеса должны быть приторможены для компенсации заноса. Система мгновенно реагирует на разницу в скорости вращения колес одной оси и угловые ускорения кузова.
Типовые сценарии активации
| Ситуация | Признаки | Действия ESP |
|---|---|---|
| Избыточная поворачиваемость | Занос задней оси, разворот кормы наружу поворота | Притормаживание внешнего переднего колеса, снижение крутящего момента |
| Недостаточная поворачиваемость | Снос передних колес, движение по увеличенному радиусу | Притормаживание внутреннего заднего колеса, коррекция тяги |
| Диагональное вывешивание | Потеря контакта колес с дорогой при переезде неровностей | Селективное торможение нагруженных колес, блокировка дифференциала |
Особенно эффективна система при комбинированных сценариях:
- Резкий объезд препятствия - предотвращает ритмичный занос контролируемым торможением передних колес
- Разгон на разнородном покрытии - подавляет пробуксовку через снижение мощности и подтормаживание буксующего колеса
- Торможение в повороте - компенсирует снос передней оси точечным импульсным торможением
Алгоритм распознавания заноса: анализ расхождения углов
Принцип работы ESP базируется на постоянном сравнении фактического поведения автомобиля с расчетной моделью, заданной водителем через рулевое колесо. Система непрерывно анализирует данные с датчиков: скорости вращения колес, угла поворота руля (датчик рулевого колеса), поперечного ускорения и угловой скорости вокруг вертикальной оси (датчик рысканья).
Ключевым для выявления заноса становится анализ расхождения между двумя критическими параметрами: углом заданного движения (рассчитанным на основе положения руля и скорости автомобиля) и фактическим углом поворота (определяемым по данным датчика рысканья и поперечного ускорения). Если это расхождение превышает допустимый порог, ESP идентифицирует ситуацию как потерю устойчивости.
Этапы анализа и реакции
Процесс распознавания и коррекции заноса включает четкую последовательность действий:
- Расчет желаемой траектории: Блок управления ESP вычисляет теоретический угол поворота автомобиля, исходя из текущего угла поворота рулевого колеса и скорости движения.
- Фиксация реального поведения: Датчик рысканья (гироскоп) измеряет фактическую скорость вращения автомобиля вокруг вертикальной оси, а датчик поперечного ускорения фиксирует реальное боковое смещение кузова.
- Сравнение и диагностика: ЭБУ сравнивает рассчитанный угол поворота с фактическим. Значительное расхождение (например, машина поворачивает медленнее или быстрее, чем "хочет" руль) означает начало заноса (избыточная или недостаточная поворачиваемость).
- Целевое торможение: Обнаружив несоответствие, система мгновенно определяет, какое колесо нужно притормозить для стабилизации:
- Избыточная поворачиваемость (зад сносит наружу поворота): Торможение переднего внешнего колеса.
- Недостаточная поворачиваемость (перед сносит наружу поворота): Торможение заднего внутреннего колеса.
Для наглядности, как ESP интерпретирует данные:
| Тип заноса | Расхождение углов | Действие ESP |
|---|---|---|
| Избыточная поворачиваемость (снос задка) | Фактический угол поворота > Заданный угол | Торможение переднего внешнего колеса |
| Недостаточная поворачиваемость (снос передка) | Фактический угол поворота < Заданный угол | Торможение заднего внутреннего колеса |
Этот алгоритм, выполняемый за доли секунды, позволяет ESP генерировать стабилизирующий момент и возвращать автомобиль на намеченную траекторию, предотвращая вращение или вылет с дороги. Точность работы напрямую зависит от скорости обработки данных и корректности показаний датчиков.
Активное торможение отдельных колес: коррекция траектории
При отклонении автомобиля от заданной траектории (например, в заносе или сносе) ESP мгновенно вычисляет, какое колесо необходимо притормозить для стабилизации. Система задействует гидравлический блок, создающий давление в тормозной магистрали конкретного колеса независимо от действий водителя. Это вызывает контролируемое замедление выбранного колеса, создавая вращающий момент вокруг вертикальной оси автомобиля.
Для компенсации избыточной поворачиваемости (заноса задней оси) система притормаживает внешнее переднее колесо относительно поворота. Это гасит вращательный импульс и возвращает авто на курс. При недостаточной поворачиваемости (сносе передней оси) тормозное усилие прикладывается к внутреннему заднему колесу, "подтягивая" передок в нужном направлении. Интенсивность воздействия точно дозируется на основе данных от датчиков.
Ключевые принципы коррекции
- Избирательность: Торможение применяется точечно к 1-2 колесам, минимально влияя на общую скорость
- Динамика: Коррекция длится доли секунды, система постоянно оценивает эффект
- Приоритет управления: ESP временно ограничивает мощность двигателя для усиления эффекта
| Тип потери управления | Тормозящее колесо | Физический эффект |
|---|---|---|
| Занос (избыточная поворачиваемость) | Переднее наружное | Противодействие вращению кузова |
| Снос (недостаточная поворачиваемость) | Заднее внутреннее | Поворот передней оси в сторону поворота |
Электроника отслеживает не только углы поворота колес и скорость, но и боковое ускорение, давление в тормозной системе. Алгоритмы учитывают тип привода, загрузку авто и состояние дорожного покрытия. При срабатывании системы водитель ощущает вибрацию педали тормоза и кратковременное "подруливание" без его участия.
Многократные импульсные торможения (до 20 раз/сек) позволяют скорректировать траекторию без полной остановки колеса. ESP работает в связке с ABS и EBD, используя их исполнительные механизмы, но решает принципиально иную задачу – сохранение курсовой устойчивости, а не сокращение тормозного пути.
Преимущества векторного распределения тормозных усилий
Основное преимущество заключается в активном управлении вектором поворота автомобиля за счет избирательного подтормаживания отдельных колес. Система не просто замедляет вращение, а создает контролируемый вращающий момент вокруг вертикальной оси кузова. Это позволяет буквально "заворачивать" автомобиль в нужном направлении, корректируя траекторию даже в сложных условиях, например, при недостаточной или избыточной поворачиваемости.
Точное дозирование усилия на каждом колесе существенно повышает курсовую устойчивость. Система динамически компенсирует боковые силы, действующие на автомобиль при резких маневрах, на скользком покрытии или под воздействием бокового ветра. Это предотвращает развитие заноса или сноса, удерживая машину на заданной водителем траектории без потери контроля.
Ключевые выгоды технологии
- Повышенная маневренность: Уменьшение радиуса поворота на низких скоростях и более четкое следование рулению на высоких.
- Ранняя стабилизация срыва: Автоматическое парирование начальных признаков потери устойчивости (заноса/сноса) до перехода в критическую фазу.
- Адаптация к покрытию: Учет разного коэффициента сцепления под левыми и правыми колесами (μ-split) для сохранения прямолинейности торможения.
- Синергия с ESP: Усиление эффективности основной системы стабилизации за счет более быстрого и точечного воздействия.
Результатом становится не только безопасность, но и предсказуемость поведения автомобиля. Водитель получает обратную связь, соответствующую его действиям, без неожиданных реакций на предельных режимах. Это снижает утомляемость и повышает уверенность при управлении, особенно в неблагоприятных дорожных условиях.
Вмешательство в работу двигателя: принудительное снижение мощности
При обнаружении признаков потери сцепления (например, чрезмерной пробуксовки ведущих колёс) ESP активно вмешивается в управление двигателем. Электронный блок системы через CAN-шину отправляет запрос блоку управления двигателем (ECU) на мгновенное уменьшение крутящего момента.
Это достигается путём временного ограничения подачи топлива, изменения угла опережения зажигания или прикрытия дроссельной заслонки (в зависимости от конструкции). Результатом становится быстрое и точное снижение мощности, передаваемой на колёса, без физического нажатия водителем на педаль тормоза.
Механизм и последствия снижения мощности
Целью данного вмешательства является:
- Прекращение пробуксовки: Уменьшение крутящего момента позволяет колёсам восстановить сцепление с дорожным покрытием.
- Стабилизация траектории: Снижение мощности предотвращает развитие заноса или сноса, вызванного избыточной тягой на скользком покрытии или в повороте.
- Синхронизация с тормозным воздействием: Создаёт условия для эффективной работы импульсного торможения отдельных колёс, так как они уже не буксуют под нагрузкой.
Водитель ощущает это как кратковременное "проваливание" тяги или вибрацию педали акселератора. Приоритет отдаётся стабильности автомобиля, а не выполнению команды водителя на ускорение.
| Ситуация | Действие ESP на двигатель | Эффект |
|---|---|---|
| Резкий старт на льду | Мгновенное сокращение подачи топлива | Прекращение буксования ведущих колёс |
| Избыток газа в крутом повороте | Прикрытие дроссельной заслонки | Предотвращение сноса передней оси |
| Разгон на разнородном покрытии | Коррекция угла зажигания | Выравнивание тяги для избежания рыскания |
Этот метод не заменяет тормозную систему, а дополняет её, работая с причиной потери устойчивости – избыточной мощностью. Система возвращает полный контроль над двигателем водителю сразу после стабилизации автомобиля.
Взаимодействие ESP с ABS при экстренном торможении
При экстренном торможении ESP мгновенно активирует ABS, предотвращая блокировку колёс. Датчики ESP отслеживают скорость вращения каждого колеса и передают данные в блок управления ABS. Это позволяет системе динамически регулировать тормозное усилие даже на разнородных покрытиях.
ABS модулирует давление в тормозных контурах, сохраняя управляемость. Одновременно ESP анализирует данные о поперечном ускорении и угле поворота руля. Если автомобиль начинает уходить в занос, ESP притормаживает конкретные колёса через гидравлический блок ABS, корректируя траекторию.
Ключевые этапы совместной работы
- Распознавание блокировки: Датчики ESP фиксируют резкое падение скорости вращения колеса
- Коррекция давления: Гидравлический модулятор ABS снижает усилие на заблокированном колесе
- Стабилизация курса: ESP дозированно подтормаживает внешние колёса при сносе передней оси
- Восстановление сцепления: Циклы растормаживания ABS поддерживают максимальное трение шин с дорогой
Результат взаимодействия: Водитель сохраняет контроль над направлением движения даже при полном нажатии педали тормоза. Эффективный тормозной путь сокращается на 15-20% по сравнению с автомобилями без этих систем.
Синхронизация с противобуксовочной системой (TCS)
Система ESP взаимодействует с противобуксовочной системой (TCS) через единый блок управления, используя общие датчики скорости вращения колес и акселерометры. При обнаружении проскальзывания ведущих колес TCS снижает крутящий момент двигателя через ЭБУ или притормаживает буксующее колесо. ESP дополняет эти действия, анализируя не только продольное, но и поперечное движение автомобиля, предотвращая занос при разгоне на скользком покрытии.
Если TCS фокусируется исключительно на предотвращении потери тяги, то ESP мгновенно реагирует на малейшие отклонения от заданной траектории. Например, при резком ускорении на повороте TCS борется с пробуксовкой, а ESP корректирует вектор движения, подтормаживая внешние колеса для сохранения курса. Это обеспечивает комплексную стабилизацию, где TCS становится исполнительным механизмом ESP в сценариях потери сцепления при разгоне.
Ключевые аспекты совместной работы
Основные принципы синхронизации:
- Иерархия управления: ESP имеет приоритет над TCS. При активации электронной стабилизации противобуксовочная система временно отключается.
- Обмен данными в реальном времени: Датчики ABS передают информацию о блокировке/проскальзывании одновременно в оба модуля со скоростью до 100 раз в секунду.
- Адаптивное торможение: ESP использует гидравлический блок TCS для точечного подтормаживания колес без участия водителя.
Сравнение функциональных задач:
| Система | Главная цель | Тип воздействия |
|---|---|---|
| TCS | Подавление пробуксовки ведущих колес | Снижение крутящего момента, импульсное торможение |
| ESP | Стабилизация курсовой устойчивости | Дифференцированное торможение отдельных колес |
Важно: Современные реализации объединяют ESP и TCS в единый алгоритм (например, Bosch VDC), где противобуксовочная функция интегрирована как подмодуль. Это устраняет конфликты управления и сокращает время реакции до 20 мс.
Интеграция с электронным дифференциалом на полноприводных авто
На полноприводных автомобилях ESP тесно взаимодействует с системой электронного блокирования дифференциала (E-Diff), что кардинально меняет характер управления тягой. Принцип основан на принудительном перераспределении крутящего момента между осями и отдельными колесами через многодисковые муфты. ESP анализирует данные о проскальзывании, углах поворота и поперечном ускорении, а E-Diff физически реализует корректировки, подтормаживая буксующее колесо или направляя больший момент на колесо с лучшим сцеплением.
Эта интеграция позволяет решать проблемы, недоступные классической ESP: предотвращение сноса/заноса не только тормозным воздействием, но и активным "векторным" распределением тяги. Например, в повороте при избыточной поворачиваемости система может временно заблокировать межосевой дифференциал и передать до 70% момента на переднюю ось, стабилизируя траекторию без резкого сброса оборотов двигателя.
Ключевые аспекты совместной работы
- Алгоритмы превентивного срабатывания: E-Diff получает прогнозные данные от ESP о риске потери сцепления до начала реального скольжения
- Динамическое перераспределение момента: автоматическое изменение блокировки дифференциалов от 0% до 100% за 0.1-0.3 секунды
- Синхронизация с ABS: при торможении на смешанном покрытии E-Diff усиливает эффект ESP, дозируя тягу на колесах с разным коэффициентом сцепления
| Ситуация | Действие ESP | Действие E-Diff |
|---|---|---|
| Пробуксовка внутреннего колеса в повороте | Подтормаживает буксующее колесо | Перенаправляет момент на внешнее колесо оси |
| Резкий старт на льду | Снижает обороты двигателя | Блокирует межосевой дифференциал, распределяя момент на оси с лучшим сцеплением |
| Занос на переменном покрытии | Притормаживает переднее внешнее колесо | Создает "вращающий момент" путем разной блокировки дифференциалов по осям |
Современные реализации (например, VW 4Motion или Audi Quattro Ultra) используют единый контроллер, управляющий обеими системами. Это сокращает время реакции до 20 мс и позволяет применять комбинированные сценарии: одновременное подтормаживание колеса ESP и переброс момента через E-Diff на противоположную сторону оси для максимально эффективного выхода из критических режимов.
Различия в работе ESP на переднеприводных и заднеприводных моделях
На переднем приводе система ESP активно использует торможение внутреннего заднего колеса для компенсации недостаточной поворачиваемости, одновременно снижая обороты двигателя. Это предотвращает снос передней оси и стабилизирует траекторию за счёт "подтягивания" автомобиля в поворот. На заднем приводе ESP чаще задействует торможение передних колёс, особенно при избыточной поворачиваемости, чтобы противодействовать заносу задней оси.
При активации на заднеприводных авто система резко сокращает подачу топлива для уменьшения крутящего момента на ведущих колёсах, так как избыточная мощность здесь чаще провоцирует занос. На переднем приводе сброс тяги менее агрессивен, поскольку ведущие колёса одновременно задают направление движения, и полное отключение мощности может ухудшить управляемость.
Ключевые отличия в работе ESP
| Аспект | Передний привод | Задний привод |
|---|---|---|
| Основная коррекция сноса | Торможение внутреннего заднего колеса | Торможение внешнего переднего колеса |
| Реакция на занос | Снижение тяги + торможение задних колёс | Жёсткое ограничение мощности + торможение передних колёс |
| Типичная проблема | Недостаточная поворачиваемость (снос передка) | Избыточная поворачиваемость (занос задка) |
| Приоритетное действие | Создание "эффекта поворачивания" через торможение | Снижение крутящего момента на задней оси |
Регулирование динамики на смешанном покрытии: асфальт, лед, грунт
При одновременном контакте колёс с поверхностями разного сцепления (например, передняя ось на льду, задняя на асфальте) ESP анализирует разницу в скорости вращения колёс через датчики ABS. Система вычисляет фактическое отклонение траектории от заданной водителем (по углу поворота руля и поперечному ускорению), прогнозирует развитие заноса или сноса.
Модуль ESP экстренно вмешивается, притормаживая конкретные колёса с высоким сцеплением для создания стабилизирующего момента. Например, при сносе передней оси на льду система задействует тормоз заднего внутреннего колеса на асфальте, "разворачивая" автомобиль в нужном направлении. Параллельно снижается крутящий момент двигателя через ЭБУ для уменьшения силы тяги.
Алгоритмы адаптации к комбинированным поверхностям
- Дифференцированное торможение: ESP избирательно прижимает колодки к дискам колёс с лучшим сцеплением (на асфальте/грунте), игнорируя буксующие на льду.
- Коррекция тяги: При разгоне система ограничивает мощность даже при частичном контакте с низкофрикционным покрытием, предотвращая пробуксовку.
- Компенсация кренов: На грунтовых участках с неровностями ESP усиливает тормозное воздействие на внешних колёсах при повороте, противодействуя опрокидыванию.
Критически важна синхронизация с другими системами: ABS предотвращает блокировку колёс на асфальте во время маневра, а TCS (контроль тяги) дополняет ESP, снижая обороты двигателя при резком старте на разнородном покрытии.
Особенности поведения на крутых спусках и подъемах
На крутых спусках ESP предотвращает блокировку колес при интенсивном торможении, сохраняя управляемость. Система анализирует поперечное ускорение и угол наклона дороги, дозируя давление в тормозных контурах для каждого колеса отдельно. Это минимизирует риск заноса при прохождении поворотов на склоне и снижает нагрузку на тормозные диски.
При подъемах ESP активно противодействует пробуксовке ведущих колес, особенно на сыпучих или скользких поверхностях. Датчики фиксируют разницу скоростей вращения колес, после чего система притормаживает буксующее колесо и снижает крутящий момент двигателя через блок управления. Это обеспечивает равномерное распределение тяги и предотвращает "рыскание" автомобиля при старте в гору.
Ключевые функции на сложном рельефе
- Контроль спуска (Hill Descent Control): автоматически поддерживает заданную скорость на уклонах
- Ассистент трогания в гору (Hill Start Assist): временно удерживает тормозное давление при старте на подъеме
- Динамическое распределение тормозных усилий: предотвращает снос передней оси на спусках
- Адаптивное ограничение тяги: дозирует мощность двигателя при пробуксовке на подъемах
| Ситуация | Действие ESP |
| Пробуксовка при подъеме | Притормаживание ведущих колес + снижение оборотов двигателя |
| Избыточная поворачиваемость на спуске | Притормаживание внешнего переднего колеса + коррекция тяги |
| Блокировка колес на уклоне | Циклическое сброс/поддержание давления в тормозной магистрали |
Принцип работы в поворотах разной сложности
При вхождении в поворот датчики ESP непрерывно сравнивают угол поворота руля с фактической траекторией движения автомобиля. Система анализирует скорость вращения каждого колеса, поперечное ускорение и рыскание (угловую скорость вокруг вертикальной оси). Любое отклонение от заданной траектории интерпретируется как потеря устойчивости.
Если расчетный вектор движения не совпадает с реальным, ESP мгновенно вычисляет, какое колесо необходимо притормозить для компенсации заноса или сноса. Одновременно система может дать команду блоку управления двигателем на снижение крутящего момента через дроссельную заслонку или систему впрыска топлива.
Особенности работы в разных условиях
| Тип поворота | Действия ESP |
|---|---|
| Плавный поворот на сухом покрытии | Минимальное вмешательство. При незначительном сносе передней оси - импульсное подтормаживание заднего внутреннего колеса. Снижение мощности двигателя на 5-10%. |
| Резкий маневр (перестроение) | Активное торможение наружных колес для противодействия крену. Коррекция рыскания за счет асимметричного тормозного усилия. Снижение крутящего момента до 50%. |
| Скользкое покрытие (гололед, мокрая дорога) | Экстренное торможение одного ключевого колеса с точным дозированием усилия (до 15 раз/сек). Глубокое ограничение мощности двигателя. Противодействие как сносу, так и заносу за счет встречных импульсов на разных осях. |
| Экстремальный занос | Комплексное торможение 2-3 колес с переменной интенсивностью. Дифференцированное снижение крутящего момента. Активация насоса обратной подачи тормозной жидкости для предотвращения блокировки колес. |
Во всех сценариях ESP сохраняет возможность маневрирования, дозируя тормозные усилия ниже порога блокировки колес. Система деактивируется только при выключении или принудительном отключении водителем.
Кнопка отключения ESP: когда это действительно необходимо
Несмотря на критическую важность системы ESP для безопасности, существуют специфические ситуации, когда ее временное отключение оправдано. Производители предусмотрели эту возможность через специальную кнопку, обычно обозначенную пиктограммой заноса или надписью "ESP OFF". Важно понимать, что деактивация носит временный характер – система автоматически перезапустится после превышения скорости 50 км/ч или при следующем запуске двигателя.
Отключение ESP требует осознанного подхода и применяется только в исключительных условиях. Водитель должен четко осознавать риски потери контроля над автомобилем. Ниже описаны основные сценарии, когда деактивация системы может быть целесообразна.
Ситуации, требующие отключения ESP
- Глубокий снег, песок или грязь: При пробуксовке в рыхлых покрытиях ESP может ошибочно распознать пробуксовку как потерю сцепления и заглушить двигатель, усугубляя застревание.
- Езда с цепями противоскольжения: Датчики ESP могут некорректно интерпретировать вибрации от цепей как занос, что приводит к ложному срабатыванию тормозов.
- Динамичное вождение на гоночной трассе: Для выполнения контролируемых заносов и точного дрифта требуется полный контроль над тягой без электронных вмешательств.
- Тестирование автомобиля на стенде: При диагностике на роликовом стенде ESP может блокировать колеса из-за разницы в скорости вращения.
| Ситуация | Почему отключают ESP | Риски при отключении |
|---|---|---|
| Застревание в сугробе | Система душит двигатель при пробуксовке | Резкий снос при случайном газе |
| Песчаная трасса | ESP блокирует колеса при раскачке | Потеря курса на укатанных участках |
| Дрифт/трек | Система препятствует управляемому заносу | Непредсказуемый разворот |
Категорически не рекомендуется отключать ESP на мокром асфальте, гололеде, крутых поворотах или при обычной городской езде. В этих условиях система предотвращает до 80% аварий, вызванных сносом передней оси или заносом задней. Помните: кнопка ESP OFF создана для кратковременного решения специфических проблем, а не для постоянной эксплуатации.
Автоматическое возобновление работы после деактивации
Система ESP не отключается полностью при срабатывании – она временно деактивирует свою корректирующую функцию, как только водитель демонстрирует полный контроль над автомобилем. Это происходит, например, при активном рулении или намеренном дрифте. Система переходит в режим мониторинга, продолжая анализировать данные с датчиков, но не вмешиваясь в управление.
Как только электроника фиксирует признаки потери стабильности (например, резкое скольжение оси или несоответствие угла поворота руля траектории движения), ESP мгновенно и плавно возобновляет активное вмешательство. Это включает подтормаживание отдельных колес и/или снижение крутящего момента двигателя. Процесс происходит без задержек, так как блок управления постоянно получает актуальную информацию о скорости вращения колес, поперечном ускорении, угле поворота руля и положении педали газа.
Ключевые особенности возобновления работы
Эффективность восстановления контроля обеспечивается тремя факторами:
- Непрерывный анализ данных – даже в "пассивном" режиме ESP каждые 0.01 секунды сравнивает реальные параметры движения с расчетными
- Прогнозирование сценариев – алгоритмы предугадывают развитие заноса/сноса за 0.1-0.3 секунды до критической фазы
- Каскадное подключение систем – сначала задействуется тормозной модуль, затем при необходимости подключается управление дросселем
Важно: ESP всегда сохраняет приоритет действий водителя. Если система определяет, что корректирующие воздействия противоречат осознанным маневрам (например, спортивное вождение на закрытой трассе), она снова перейдет в режим ожидания после стабилизации траектории.
Влияние на управляемость при езде с прицепом
Прицеп значительно изменяет динамику автомобиля: увеличивается общая масса, смещается центр тяжести назад, а боковые силы от прицепа провоцируют рыскание. В поворотах возникает дополнительная инерция, повышающая риск заноса или складывания автопоезда. Без электронных систем водителю требуется постоянно корректировать траекторию рулем и контролировать скорость, особенно на мокром покрытии или при резких маневрах.
ESP непрерывно анализирует данные с датчиков (угол поворота руля, поперечное ускорение, скорость вращения колес) и сравнивает реальное поведение авто с расчетной моделью. При обнаружении рысканья прицепа или отклонения от траектории система мгновенно подтормаживает конкретные колеса тягача и снижает крутящий момент двигателя. Это компенсирует раскачивание и стабилизирует автопоезд, предотвращая развитие опасных ситуаций.
Ключевые аспекты работы ESP с прицепом
- Активное подавление "змейки": При боковых колебаниях прицепа ESP притормаживает переднее колесо, противоположное направлению рывка, создавая стабилизирующий момент.
- Контроль заноса в повороте: При сносе передней оси из-за инерции прицепа система замедляет заднее внутреннее колесо, возвращая авто на траекторию.
- Снижение мощности: Одновременно с торможением ESP ограничивает подачу топлива, уменьшая тягу и нагрузку на сцепное устройство.
| Ситуация | Действие ESP | Результат |
|---|---|---|
| Резкий объезд препятствия | Торможение внешних колес + снижение крутящего момента | Подавление складывания автопоезда |
| Боковой порыв ветра | Короткие импульсы тормозов на наветренной стороне | Компенсация смещения прицепа |
| Проезд неровности одной стороной | Стабилизация колес тягача при отрыве прицепа от земли | Предотвращение опрокидывания |
Для максимальной эффективности ESP требуется активация специального режима "Прицеп" (если предусмотрено авто). Он адаптирует алгоритмы под увеличенную массу и инерцию. Важно помнить: система не отменяет необходимость правильной загрузки прицепа (не более 10% нагрузки на сцепку) и соблюдения скоростного режима.
Минимизация риска переворота на высоком центре тяжести
ESP постоянно анализирует данные о поперечном ускорении, угле поворота руля и скорости вращения каждого колеса. При выявлении признаков критического крена (например, в крутых виражах или при резких маневрах на высокой скорости) система мгновенно вычисляет риск потери устойчивости и угрозу опрокидывания.
Для стабилизации автомобиля ESP избирательно притормаживает определенные колеса, создавая контролирующий момент силы. Приоритет отдается торможению передних колес – особенно внешнего по отношению к повороту, что эффективно гасит инерцию заноса и противодействует опрокидыванию. Параллельно система может временно снизить крутящий момент двигателя через электронный блок управления.
Ключевые механизмы предотвращения переворота
- Дифференцированное торможение: Принудительное замедление отдельных колес для создания стабилизирующего вращающего момента.
- Контроль тяги: Автоматическое снижение мощности двигателя при одновременном проскальзывании ведущих колес.
- Анализ крена: Датчики угловой скорости и акселерометры отслеживают малейшие отклонения кузова от вертикальной оси.
| Фактор риска | Действие ESP |
| Резкий поворот руля на высокой скорости | Торможение внешнего переднего колеса + сокращение подачи топлива |
| Скольжение на неровном покрытии | Импульсное торможение колес на разных осях для выравнивания траектории |
| Динамическое раскачивание кузова | Циклическое притормаживание для гашения резонансных колебаний |
Особую эффективность система демонстрирует на внедорожниках, микроавтобусах и автомобилях с груженым багажником, где высокий центр тяжести увеличивает склонность к опрокидыванию. ESP компенсирует этот недостаток, сохраняя вектор движения в безопасных пределах даже при экстремальных отклонениях.
Связь с системами экстренного торможения (BAS) и автоудержания
ESP интегрируется с системой экстренного торможения (BAS) для максимальной эффективности в критических ситуациях. Когда датчики ESP фиксируют резкое нажатие педали тормоза (характерное для панических действий водителя), модуль BAS мгновенно активируется, форсируя давление в тормозной магистрали до максимума даже при недостаточном усилии на педали. Это сокращает тормозной путь, а ESP параллельно стабилизирует траекторию, предотвращая занос при таком интенсивном замедлении.
Взаимодействие с системой автоудержания (Auto Hold) проявляется при трогании на уклонах и в пробках. При активации Auto Hold удерживает тормозное давление после остановки автомобиля, снимая нагрузку с водителя. При начале движения ESP анализирует данные о продольном и поперечном ускорении: если система детектирует риск отката назад (на подъёме) или нежелательное смещение (например, при смене полосы в пробке), она точечно подтормаживает отдельные колёса, обеспечивая плавный и контролируемый старт без скатывания.
Ключевые аспекты совместной работы
Синхронизация достигается через:
- Общий гидравлический блок: ESP, BAS и Auto Hold используют единый насос и клапаны для управления тормозным давлением.
- Совместную обработку данных: Датчики вращения колёс, продольного/поперечного ускорения и угла поворота руля передают информацию в центральный процессор ESP, координирующий реакцию всех систем.
- Алгоритмы экстренного вмешательства: При срабатывании BAS ESP автоматически переходит в режим повышенной готовности, корректируя вектор тяги и тормозные усилия для сохранения курса.
Для наглядности сравним функции систем:
| Система | Основная задача | Роль ESP во взаимодействии |
| BAS | Мгновенное усиление торможения | Компенсация заноса/рысканья при экстренном замедлении |
| Auto Hold | Удержание автомобиля на месте | Контроль устойчивости при старте (особенно на уклонах) |
Такая интеграция превращает ESP в центральный координатор безопасности: она не только парирует потерю управляемости в поворотах, но и оптимизирует работу тормозных систем в штатных и нештатных сценариях, минимизируя влияние человеческого фактора.
Типичные неисправности: диагностика по сигналам на панели

При возникновении проблем с системой ESP на приборной панели загораются специфические индикаторы, требующие немедленного внимания. Постоянное свечение значка ESP (жёлтый автомобиль с волнистыми следами) или комбинации с индикатором ABS сигнализирует об отключении электронного стабилизатора из-за неисправности.
Мигание лампочки ESP во время движения указывает на активное вмешательство системы в управление – это штатная реакция на скольжение. Однако если индикатор мигает без видимых причин (на сухом асфальте, без резких манёвров), это свидетельствует о ложных срабатываниях из-за сбоев датчиков.
Расшифровка сигналов и возможные причины

| Индикатор | Статус | Вероятные неисправности |
|---|---|---|
| ESP/ABS | Горит постоянно |
|
| ESP OFF | Горит при включённой системе |
|
| ESP | Мигает без экстренных ситуаций |
|
Дополнительными симптомами часто выступают отсутствие реакции на кнопку ESP OFF и активация контрольной лампы руля. Для точной диагностики требуется сканирование кодов ошибок через OBD-II порт: комбинации типа C0110 (неисправность насоса ESP) или C0121 (дефект модулятора) укажут на повреждённые компоненты.
Как ABS/ESP влияет на износ тормозных колодок
Система ABS предотвращает блокировку колес при экстренном торможении, используя циклы кратковременного сброса давления в тормозной магистрали. Этот принцип "пульсирующего" торможения сохраняет управляемость, но вызывает более интенсивное трение колодок о диск в моменты активной работы системы. Каждое срабатывание ABS создает серию коротких, но мощных контактов колодки с поверхностью диска.
ESP расширяет функционал ABS, притормаживая отдельные колеса для коррекции заноса или сноса. Такие точечные подтормаживания (особенно на грани сцепления) происходят даже без нажатия педали водителем. Система активирует тормоза десятки раз в секунду, что неизбежно увеличивает механическую нагрузку на фрикционные материалы.
Ключевые аспекты воздействия
Основные факторы повышенного износа:
- Микропроскальзывание: При пульсации ABS колодка не статично прижимается к диску, а многократно "прихватывает" его поверхность, усиливая абразивный износ.
- Локальный перегрев: Частые импульсы торможения ESP в критических режимах генерируют высокие температуры на небольших участках колодки, ускоряя деградацию материала.
- Работа без участия водителя: ESP использует тормоза профилактически, например, на поворотах или неровностях. Водитель не ощущает этих срабатываний, но износ колодок продолжается.
| Фактор | Влияние на износ | Пример сценария |
|---|---|---|
| Импульсы ABS | +15-25% | Резкое торможение на льду |
| Коррекция ESP | +10-40% (зависит от условий) | Стабилизация в крутом вираже |
| Агрессивная езда | Синергетический эффект +30-50% | Динамичное вождение на извилистой дороге |
Важно: Несмотря на повышенный износ, ABS/ESP критически важны для безопасности. Регулярная диагностика тормозов (особенно после частых срабатываний систем) обязательна. Качественные колодки с термостойкими составами лучше переносят нагрузки от электронных помощников.
Ограничения системы: физические законы против электроники
Электронный контроль устойчивости (ESP) способен молниеносно корректировать поведение автомобиля, но его возможности жестко ограничены фундаментальными законами физики. Система может перераспределять тормозные усилия и управлять мощностью двигателя, однако не в силах преодолеть инерцию массы или силу трения скольжения. Когда шины теряют сцепление с дорожным покрытием, электроника оказывается бессильна – дальнейшая траектория движения определяется исключительно балансом физических сил.
Критическим фактором остается предел сцепления шин: даже самая совершенная система не сможет сохранить контроль, если вектор скорости или угол поворота руля превышают физически возможные значения для данных дорожных условий. ESP минимизирует последствия ошибок водителя, но не отменяет необходимости адекватной оценки дорожной ситуации и выбора безопасной скорости.
Ключевые физические барьеры
Основные ограничения работы ESP обусловлены:
- Коэффициентом трения покрышек: На льду или мокром асфальте порог срабатывания системы снижается на 40-60%
- Инерцией транспортного средства: При экстренном маневре на скорости 80 км/ч автомобилю массой 1.5 т требуется минимум 32 метра для изменения вектора движения
- Законами динамики: Невозможность одновременного выполнения резкого поворота и экстренного торможения без потери управляемости
| Физический фактор | Влияние на ESP | Пример ограничения |
|---|---|---|
| Сила инерции | Запаздывание реакции | При разгоне до 100 км/ч система не успеет компенсировать резкий занос |
| Центробежная сила | Снижение эффективности в поворотах | На вираже радиусом 50 м безопасная скорость не превышает 60 км/ч независимо от работы ESP |
| Гидропланирование | Полная потеря управления | При аквапланировании на скорости 90 км/ч электроника не восстановит контакт шин с дорогой |
Важно понимать: ESP снижает риск опрокидывания на 80% согласно исследованиям NHTSA, но лишь при условии, что водитель не превышает физический предел сцепления шин. Система действует в рамках закона сохранения импульса и не генерирует дополнительную силу трения.
- При экстремальном скольжении электроника способна лишь частично скорректировать траекторию
- Работа системы зависит от исправности других компонентов: давления в шинах, состояния амортизаторов, эффективности тормозов
- На крутых склонах (>20%) или при неравномерной загрузке авто возможности ESP сокращаются на 25-30%
Эволюция ESP: адаптивные алгоритмы будущего

Современные системы ESP переходят от реактивного к предиктивному управлению, интегрируя данные с камер, радаров и лидаров. Это позволяет алгоритмам анализировать дорожную ситуацию на сотни метров вперед, предугадывая риски до потери сцепления. Например, при обнаружении гололеда на мосту система заранее корректирует распределение тормозных усилий и крутящего момента.
Искусственный интеллект стал ключевым драйвером эволюции: нейросети обучаются на терабайтах реальных сценариев потери контроля. Самообучающиеся алгоритмы адаптируются к стилю вождения, состоянию шин и даже качеству дорожного покрытия. В тестовых моделях ESP уже прогнозирует аварийные ситуации с точностью 98%, используя картографические данные и V2X-коммуникацию.
Перспективные направления развития
- Кооперативное управление: синхронизация ESP соседних автомобилей через облако для предотвращения массовых ДТП
- Биометрические адаптации: учет усталости водителя по данным сенсоров руля и камер
- Интеграция с системами автономного вождения уровня 4-5
| Технология | Принцип действия | Эффективность |
|---|---|---|
| eHorizon | Использование 3D-карт рельефа и погоды | Снижение аварийности на поворотах до 40% |
| Упреждающее торможение | Активация за 0.5 сек до критической точки | Сокращение тормозного пути на 15% |
К 2030 году ESP трансформируется в центральный "мозг" активной безопасности, где традиционные гидравлические компоненты заменят электромеханические актуаторы с временем отклика 5 мс. Экспериментальные образцы на базе квантовых сенсоров уже демонстрируют устойчивость на льду при 120 км/ч за счет микроимпульсного контроля каждого колеса независимо.
Список источников
При подготовке статьи о системе ESP использовались специализированные технические материалы, учебные пособия по автомобильной динамике и официальные данные производителей систем активной безопасности.
Для обеспечения точности описания принципов работы и компонентов ESP были проанализированы инженерная документация, нормативные стандарты и экспертные публикации в отраслевых изданиях.
- Бош Р. – Системы активной и пассивной безопасности автомобиля (технический справочник)
- ГОСТ Р 41.13-Н – Единообразные предписания относительно сертификации транспортных средств категорий M, N и O в отношении торможения
- Раймпель Й. – Шасси автомобиля. Том 2: Тормоза, рулевое управление, безопасность
- SAE Technical Paper Series – Анализ алгоритмов электронного контроля устойчивости (№ 2005-01-0792)
- Технические бюллетени Continental AG – Принципы функционирования модуля ESP MK 100
- Хайнц Х. – Автомобильная электроника: Системы управления и регулирования
- ISO 26262-2018 – Дорожные транспортные средства. Функциональная безопасность
- Михайловский Е.В. – Конструкция и расчет автомобиля: Учебник для вузов