Система кругового обзора - принцип работы, характеристики и применение
Статья обновлена: 01.03.2026
Маневрирование в стеснённых условиях и парковка остаются одними из самых сложных задач для водителей. Ограниченная видимость из салона автомобиля создаёт риск повреждения транспортного средства и окружающих объектов. Система кругового обзора (или панорамного обзора) призвана радикально решить эту проблему.
Эта технология формирует на экране мультимедийной системы единое изображение, показывающее автомобиль и пространство вокруг него «с высоты птичьего полёта». Она устраняет слепые зоны, предоставляя водителю полную картину происходящего в непосредственной близости от машины.
В данной статье детально рассматривается комплекс вопросов, связанных с системой кругового обзора. Мы изучим её базовый принцип функционирования, ключевые технические характеристики и существующие варианты реализации. Будут приведены существующие классификации систем. Особое внимание уделено практической стороне: подробной инструкции по правильному использованию и важным нюансам эксплуатации для обеспечения долговечности и точности работы системы.
Что такое система кругового обзора в автомобиле
Система кругового обзора (англ. Surround View, 360° Camera) – это комплекс электронных компонентов, создающий панорамное изображение пространства вокруг автомобиля в реальном времени. Она объединяет видеопотоки с нескольких камер, установленных по периметру кузова, и формирует единую "вид сверху", виртуально устраняя слепые зоны.
Основная цель системы – повышение безопасности при маневрах на низкой скорости: парковке, движении в узких проездах, проезде препятствий. Технология минимизирует риск столкновений с объектами, невидимыми в зеркала и через остекление, включая бордюры, столбики, низкие препятствия или пешеходов.
Принцип работы:
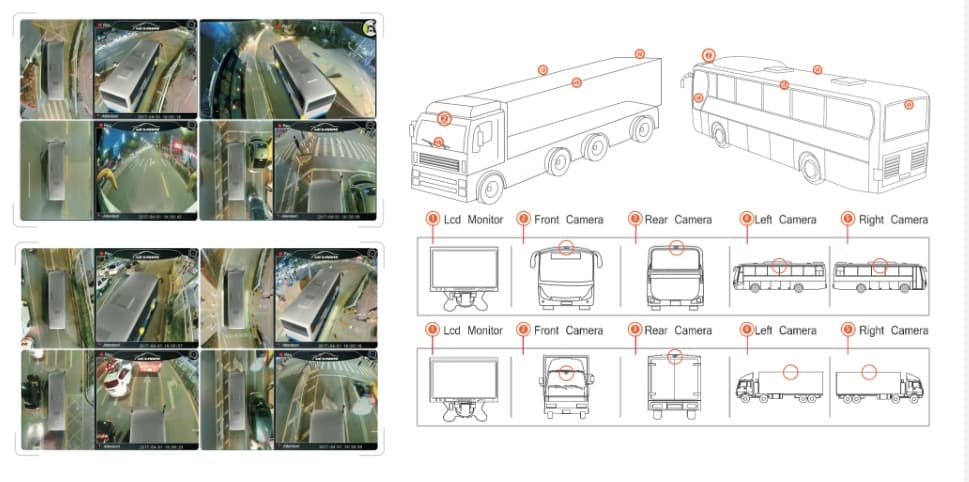
Четыре (реже – шесть) широкоугольные камеры фиксируются: спереди (в решетке радиатора/эмблеме), сзади (над номером), под боковыми зеркалами. Процессор обрабатывает видеосигналы, корректирует дисторсию (искажения объективов), "сшивает" изображения в единую сферу. Результат проецируется на мультимедийный экран с условным изображением автомобиля в центре.
Технические характеристики:
| Разрешение камер | HD (1280x720) или Full HD (1920x1080) |
| Угол обзора камер | До 190° (фронтальные/задние), 140-180° (боковые) |
| Частота обновления | 25-30 кадров/сек |
| Дополнительные режимы | Вид сбоку, траектория колес, 3D-модель |
Классификация:
- По количеству камер: 4-канальные (базовые), 6-канальные (с камерами передних колес).
- По функционалу: Стандартный круговой обзор, системы с виртуальным 3D-видом, интегрированные с парктрониками.
- По способу интеграции: Штатные (заводские), универсальные (устанавливаемые дополнительно).
Инструкция по использованию:
- Активируйте систему кнопкой на панели или автоматически (при включении задней передачи/скорости ниже 20 км/ч).
- На экране выберите режим: "вид сверху", "передний/задний вид", "линия траектории".
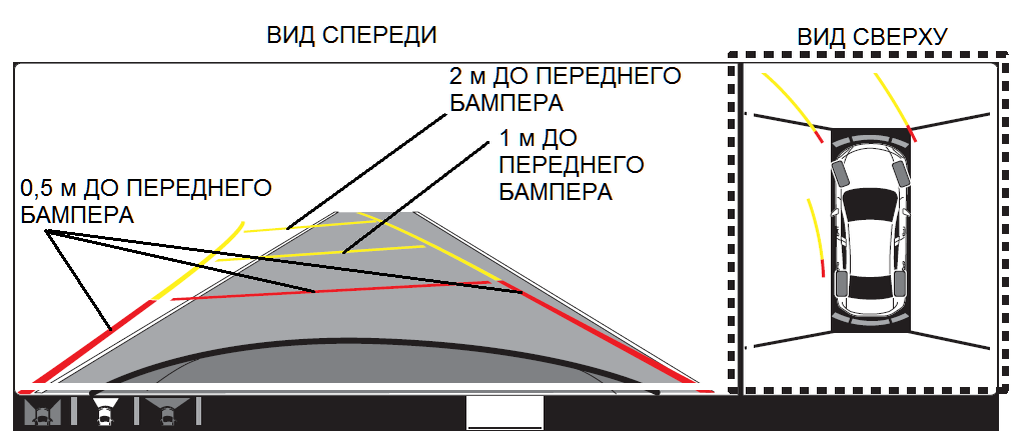
- Следите за цветными метками (часто красные/желтые) на экране, указывающими дистанцию до объектов.
- Используйте систему только как вспомогательный инструмент – контролируйте обстановку визуально и через зеркала.
Особенности эксплуатации:
Чистота камер критична – загрязнения (грязь, снег, капли) ухудшают обзор. Регулярно очищайте объективы. В темное время суток эффективность снижается – подсветка ограничена. Система не заменяет внимание водителя: динамичные объекты (велосипедисты, животные) могут не успеть попасть в кадр. Избегайте механических повреждений камер – ремонт требует калибровки.
Основные компоненты системы: камеры и процессор
Камеры выступают первичными сенсорами системы кругового обзора. Миниатюрные широкоугольные объективы (чаще 4-6 штук) размещаются в критичных точках кузова: в решётке радиатора, под наружными зеркалами, на корме и иногда на передних крыльях. Их ключевая задача – непрерывный захват видеопотока в режиме реального времени с обзором до 180-190 градусов по горизонтали, обеспечивая полное перекрытие зон вокруг автомобиля без "мёртвых" зон.
Процессор является вычислительным центром системы. Он выполняет сложную обработку сырых данных с камер: корректирует оптические искажения (фиш-ай), синхронизирует видеопотоки, сшивает отдельные изображения в единую панорамную картинку "вид сверху" или "3D-вид", накладывает виртуальные направляющие и предупреждающие метки. Мощность процессора напрямую определяет скорость обработки, качество итогового изображения и функциональность (например, распознавание объектов или работу в темноте).
Ключевые характеристики компонентов
Параметры камер:
- Разрешение: HD (1280x720) или Full HD (1920x1080).
- Чувствительность: Параметр в люксах (например, 0.1 lux) определяет качество работы при слабом освещении.
- Угол обзора: Типично 170°-190° по диагонали.
- Защита: Влагонепроницаемый корпус, антибликовое покрытие, омыватели.
Параметры процессора:
- Частота: Скорость обработки данных (ГГц).
- Алгоритмы: Качество сшивки, поддержка динамических линий, распознавание объектов.
- Интерфейсы: Подключение к дисплею головного устройства (AV, LVDS, HDMI).
| Компонент | Основная функция | Критичные параметры |
|---|---|---|
| Камеры | Захват изображения окружающей среды | Разрешение, угол обзора, светочувствительность |
| Процессор | Обработка и синтез панорамного изображения | Быстродействие, алгоритмы сшивки, интерфейсы вывода |
Принцип работы: объединение изображений с четырех камер
Камеры, установленные в переднем бампере, под боковыми зеркалами и в задней части автомобиля, захватывают видеопотоки с обзором до 180° каждая. Широкоугольные объективы минимизируют слепые зоны, но одновременно создают сильные геометрические искажения (эффект "рыбьего глаза") по краям кадра.
Электронный блок управления (ЭБУ) выполняет коррекцию перспективы: алгоритмы трансформируют каждое изображение, используя калибровочные параметры, заранее рассчитанные для конкретной модели автомобиля. Искажения устраняются, а отдельные кадры проецируются на виртуальную 3D-модель кузова, имитирующую вид сверху.
Технология сшивки изображений
Процесс объединения включает три ключевых этапа:
- Наложение с перекрытием: Обработанные изображения размещаются на цифровой модели с зонами перекрытия (15-25%), где поля зрения камер пересекаются.
- Блендинг (смешивание): В областях перекрытия применяются алгоритмы:
- Поиск совпадающих ключевых точек
- Плавное градиентное слияние яркости и цветности
- Динамическая коррекция различий в экспозиции
- Рендеринг финального вида: Система генерирует единую картинку 360°, накладывая на нее вспомогательные элементы:
Элемент Назначение Динамические направляющие Изменяют кривизну при повороте руля Статическая разметка Указывает дистанцию до объектов (0.5м/1м/1.5м) Цветовые маркеры Подсвечивают препятствия в красной/желтой зонах
Важно: Система работает в режиме реального времени (задержка не превышает 0.3 секунды). Качество сшивки зависит от точности калибровки, которая выполняется при установке оборудования. Эксплуатационные факторы (вибрация, загрязнение камер, перепады температур) могут нарушить геометрическую синхронизацию, требуя повторной калибровки.
Формирование панорамы 360° вокруг автомобиля
Создание целостной круговой панорамы базируется на синхронной обработке видеопотоков от нескольких широкоугольных камер (обычно 4-6), установленных по периметру транспортного средства. Каждая камера захватывает сектор обзора с существенным перекрытием полей зрения соседних устройств. Ключевой этап – коррекция дисторсии "рыбий глаз", присущей сверхширокоугольным объективам, которая преобразует искаженное полусферическое изображение в плоскую проекцию с естественными геометрическими пропорциями.
Сшивка полученных плоских изображений в единую сцену выполняется алгоритмами компьютерного зрения, идентифицирующими общие контрольные точки в зонах перекрытия кадров. Для точного совмещения учитываются калибровочные параметры (углы установки камер, фокусное расстояние) и динамические поправки на крен кузова. Результатом становится бесшовная топ-вид проекция, виртуально "приподнимающая" точку обзора на несколько метров над автомобилем, что обеспечивает интуитивное восприятие дистанций до объектов.
Технологические аспекты и компоненты
Критически важные элементы системы:
- Калибровка: автоматическая или ручная настройка под конкретную модель авто для компенсации производственных допусков кузова.
- GPU-ускорение: использование графических процессоров для рендеринга панорамы в реальном времени (частота ≥30 FPS).
- Динамические линии: автоматически изменяемые траектории колес, проецируемые на панораму при повороте руля.
| Параметр | Характеристики |
|---|---|
| Разрешение панорамы | HD (1280x720) – 4K (3840x2160) |
| Задержка вывода | < 0.2 секунды (критично при движении) |
| Диапазон рабочих температур | -40°C до +85°C |
Адаптивные функции включают автоматическую коррекцию яркости при въезде в туннель, подавление бликов от фар ночью и цифровое устранение "слепых зон" в местах стыковки изображений. В премиальных системах используется машинное обучение для выделения контуров пешеходов и парковочных разметки контрастными цветами.
Как процессор корректирует искажения объективов
Процессор системы кругового обзора получает сырые видеопотоки от широкоугольных камер, установленных по периметру автомобиля. Эти камеры фиксируют сильные оптические искажения (дисторсию) по краям кадра из-за особенностей объективов типа "рыбий глаз". Без коррекции изображение непригодно для анализа водителем или автоматикой.
Для устранения дисторсии применяется математическая модель коррекции, основанная на калибровочных данных каждой камеры. Процессор использует алгоритмы геометрической трансформации, пересчитывая координаты пикселей в соответствии с заранее рассчитанной картой искажений. Это позволяет "развернуть" сферическое изображение в плоскую проекцию.
Ключевые этапы обработки

- Загрузка калибровочных коэффициентов: Используются уникальные параметры дисторсии (k1, k2, k3) и фокусного расстояния для каждой камеры, полученные при заводской настройке.
- Применение полиномиальной модели: Координаты пикселей преобразуются по формуле:
rкорр = rисх × (1 + k1·r² + k2·r⁴ + k3·r⁶), где r – расстояние от центра изображения. - Сшивка изображений: Скорректированные кадры с камер проецируются на виртуальную 3D-модель кузова автомобиля, формируя единую панораму.
| Тип искажения | Причина | Метод коррекции |
|---|---|---|
| Бочкообразная дисторсия | Кривизна линз wide-angle | Обратное радиальное преобразование |
| Перспективные искажения | Наклон камер относительно поверхности | Аффинные трансформации |
Дополнительно процессор компенсирует цветовые аберрации и экспозицию между камерами для визуальной однородности. Результат выводится на дисплей в реальном времени с частотой не менее 30 кадров/с, что обеспечивает плавность при маневрировании. Корректирующие параметры хранятся в энергонезависимой памяти и не требуют ручной настройки в процессе эксплуатации.
Создание бесшовного изображения на экране
Формирование бесшовной панорамы базируется на алгоритмах сшивки видеопотоков от нескольких камер, установленных по периметру автомобиля (обычно 4-6 широкоугольных объективов). Камеры фиксируют зоны с перекрытием полей обзора (15-30%), что позволяет специализированному процессору объединить фрагменты в единую картину, устраняя геометрические искажения и расхождения на стыках.
Электронный блок управления (ЭБУ) системы выполняет коррекцию перспективы, цветового баланса и яркости отдельных участков изображения. Ключевой этап – деформация краёв кадров по математическим моделям проекции "рыбий глаз" в плоскую карту кузова автомобиля, где виртуальная точка обзора располагается условно сверху от транспортного средства.
Технические аспекты бесшовности
- Калибровка камер: Обязательная процедура после установки для точного совмещения зон перекрытия. Выполняется автоматически при движении или вручную с использованием мишеней.
- Алгоритмы блендинга: Плавный переход между кадрами достигается методами:
- Мультибандовым слиянием (раздельная обработка низких и высоких частот)
- Линейным градиентным наложением в зонах перекрытия
- Коррекцией параллакса для подвижных объектов
| Фактор | Влияние на бесшовность | Решение |
|---|---|---|
| Разное освещение зон | Контрастные переходы на стыках | Адаптивная цветокоррекция в реальном времени |
| Вибрация кузова | Дрожание линий сшивки | Стабилизация на основе данных гироскопов |
| Загрязнение линз | Размытие границ перекрытия | Предупреждение о необходимости очистки |
Эксплуатационные ограничения: Бесшовность нарушается при изменении геометрии кузова (погрузка багажа, бездорожье), требующем повторной калибровки. В снег или дождь система может временно отображать раздельные камеры из-за потери чёткости зон перекрытия.
Для пользователя выбор режимов отображения (панорама 360°, вид сверху, отдельные сектора) осуществляется через мультимедийный интерфейс. Важно учитывать, что бесшовное изображение – синтезированная модель, имеющая погрешность позиционирования объектов до 10-15 см у границ кадров.
Технология виртуального вида "сверху" в реальном времени
Принцип работы основан на синхронной обработке видеопотоков с четырёх-шести широкоугольных камер, установленных по периметру автомобиля (в решётке радиатора, под боковыми зеркалами, в заднем бампере). Специализированный процессор объединяет изображения в единую панораму, математически проецируя их на виртуальную 3D-модель кузова. Алгоритмы коррекции устраняют дисторсию, сшивают кадры с компенсацией разницы углов обзора и освещённости, создавая бесшовную картинку.
Ключевая особенность – динамическое обновление вида (до 30 кадров/сек) с сохранением перспективы "птичьего полёта" даже при движении. Система учитывает данные с датчиков парковки, рулевого угла и скорости, адаптируя проекцию. Виртуальная точка обзора располагается условно на высоте 2-3 метра за автомобилем с регулируемым углом наклона (45-90°), обеспечивая обзор зон вплотную к бамперам.
Технические характеристики
- Разрешение камер: HD (1280x720) или Full HD (1920x1080)
- Угол обзора камер: 130°-190° по диагонали
- Задержка вывода: 50-200 мс
- Режимы проекции: Стандартный "вид сверху", 3D-модель кузова, селективный обзор зоны колес
- Цветопередача: WDR (широкий динамический диапазон) для контрастности в темноте/на солнце
| Классификация по функционалу | Описание |
|---|---|
| Статическая проекция | Фиксированная точка обзора без учёта манёвров |
| Адаптивная траектория | Сдвиг угла обзора при повороте руля |
| Интеллектуальное наложение | Проекция линий траектории + парковочных разметок |
Эксплуатационные особенности: Точность картинки зависит от чистоты камер и калибровки. Ложные искажения возникают при: обледенении объективов, установке нештатных колёс или изменении клиренса. Система не заменяет визуальный контроль – слепые зоны остаются у высоких препятствий (бордюры, тонкие столбы). В дождь/снег рекомендуется ручная очистка камер. Калибровка обязательна после ДТП или замены камеры.
Угол обзора камер: фронтальная, боковые, задняя
Угол обзора камер определяет сектор пространства, охватываемый каждой камерой системы кругового обзора. Для фронтальной камеры типичный угол составляет 120–150 градусов, что обеспечивает контроль пространства перед бампером, бордюров и препятствий при парковке. Боковые камеры, интегрированные в зеркала заднего вида, обладают самым широким углом – 130–180 градусов, перекрывая слепые зоны вдоль кузова и фиксируя объекты на соседних полосах.
Задняя камера работает в диапазоне 120–170 градусов, захватывая пространство за багажником, элементы дороги и приближающийся транспорт. Широкоугольные объективы всех камер создают характерное искажение периферийных участков изображения (эффект "рыбий глаз"), которое программно корректируется при формировании панорамного вида.
Сравнительные характеристики
| Тип камеры | Типовой угол обзора | Зона охвата |
|---|---|---|
| Фронтальная | 120°–150° | Передний бампер, колесные арки, парковочные линии |
| Боковые | 130°–180° | Проезжая часть вдоль дверей, слепые зоны, соседние полосы |
| Задняя | 120°–170° | Задний бампер, траектория движения при реверсе, фонари |
Ключевые зависимости:
- Чем шире угол, тем больше площадь покрытия, но сильнее геометрические искажения
- Узкий угол улучшает детализацию центральной зоны ценой потери информации по краям
- Боковые камеры требуют максимального угла для мониторинга пешеходов и велосипедистов
Разрешение камер: SD, HD, Full HD
Разрешение камеры является ключевым параметром, напрямую определяющим уровень детализации изображения на экране системы кругового обзора. Чем выше разрешение, тем больше пикселей содержит изображение, что позволяет различать мелкие объекты (камни, бордюры, элементы разметки), читать номера машин на парковке и точнее оценивать расстояния до препятствий, особенно в условиях недостаточной освещенности.
В современных автомобильных системах кругового обзора чаще всего используются камеры со следующими стандартными разрешениями:
| Тип разрешения | Типичное разрешение (пиксели) | Особенности и применение |
|---|---|---|
| SD (Standard Definition) | ~720x480 (NTSC) ~720x576 (PAL) |
Бюджетный вариант. Минимально допустимый уровень детализации. Изображение может быть зернистым, размытым, особенно при движении или в сумерках. Затруднено распознавание мелких препятствий. |
| HD (High Definition) | 1280x720 | Средний уровень. Обеспечивает заметно лучшую детализацию по сравнению с SD. Позволяет уверенно видеть крупные препятствия и общую картину вокруг автомобиля. Наиболее распространенный вариант для систем среднего класса. |
| Full HD (Full High Definition) | 1920x1080 | Высокий уровень. Предоставляет максимально четкую и детализированную картинку среди распространенных стандартов. Позволяет различать мелкие детали (гвозди на асфальте, тонкие тросы, точное положение колеса относительно бордюра), что критично для безопасной парковки и маневрирования в стесненных условиях. Требует более мощного процессора и качественного экрана. |
Выбор разрешения камер существенно влияет на эффективность и безопасность использования системы кругового обзора. Системы с Full HD камерами предоставляют водителю наиболее полную и точную визуальную информацию об окружающем пространстве, минимизируя "слепые" зоны и риски повреждения автомобиля при маневрах.
Типы дисплеев для вывода информации
Дисплеи в системах кругового обзора служат для визуализации смонтированного изображения с камер, обеспечивая водителю контроль над слепыми зонами автомобиля. От качества экрана напрямую зависит скорость восприятия информации, точность парковки и общая безопасность.
При выборе типа дисплея учитываются ключевые параметры: яркость для работы при солнечном свете, контрастность для детализации объектов, время отклика для плавной динамики картинки, а также устойчивость к вибрациям и температурным перепадам.
Классификация дисплейных технологий
- TFT-LCD – наиболее распространённый тип с жидкокристаллической матрицей и подсветкой. Отличается доступной ценой, стабильной цветопередачей, но имеет ограниченные углы обзора и умеренную контрастность.
- OLED – дисплеи на органических светодиодах. Преимущества: глубокий чёрный цвет (за счёт отключения пикселей), высокая контрастность, широкие углы обзора и минимальная задержка вывода изображения.
- Проекционные HUD – проецируют данные на лобовое стекло или отдельный экран-ретранслятор. Позволяют сохранять фокус зрения на дороге, но требуют точной калибровки и сложнее в интеграции.
- Электронные зеркала заднего вида – комбинированные решения, заменяющие штатное зеркало ЖК-экраном с выводом видео с камеры заднего вида. Обеспечивают не затенённый пассажирами обзор.
Важно: Эксплуатация дисплеев требует защиты от прямого солнечного света (риск выгорания матрицы), регулярной очистки антистатическими салфетками и избегания механических воздействий на поверхность экрана.
Скорость обработки видео для плавной картинки
Скорость обработки видеопотока в системе кругового обзора напрямую определяет плавность и естественность формируемой панорамной картинки. Этот параметр характеризует количество кадров в секунду (FPS), которое процессор системы способен обработать с камер, склеить в единое изображение и вывести на экран. Недостаточная скорость приводит к заметным рывкам и задержкам, особенно критичным при маневрировании на малых скоростях или парковке.
Оптимальный показатель FPS варьируется в зависимости от модели системы, но минимально допустимым для комфортной эксплуатации считается значение не менее 20-25 кадров в секунду. Высококлассные системы достигают 30 FPS и выше, обеспечивая визуально непрерывное движение объектов в зоне обзора. Ключевым фактором здесь является производительность графического процессора (GPU) и алгоритмов склейки изображения, которые должны работать синхронно со скоростью съемки камер.
Факторы влияния и технические аспекты
На скорость обработки и итоговую плавность картинки влияют:
- Разрешение камер: Обработка потоков HD (1280x720) или Full HD (1920x1080) требует значительно большей вычислительной мощности, чем VGA (640x480).
- Количество источников: Системы с 4 камерами создают вчетверо большую нагрузку на процессор по сравнению с двухкамерными вариантами.
- Сложность алгоритмов: Режимы 3D-моделирования, динамические направляющие или распознавание объектов дополнительно нагружают GPU.
Типичные значения скорости обработки в зависимости от класса системы:
| Класс системы | Типовое разрешение | Скорость обработки (FPS) |
|---|---|---|
| Бюджетная | VGA / HD | 15-20 |
| Средняя | HD | 20-25 |
| Премиум | Full HD | 25-30+ |
Важно! Производители часто указывают частоту съемки камер (например, 30 FPS), а не скорость обработки финального панорамного изображения. Фактическая плавность на экране может быть ниже из-за вычислительных задержек склейки и наложения графики.
Для корректной эксплуатации рекомендуется:
- Избегать установки энергоемких приложений, конкурирующих за ресурсы процессора автомобиля.
- Своевременно обновлять ПО системы для оптимизации алгоритмов обработки.
- Контролировать температуру в районе расположения блока обработки – перегрев вызывает троттлинг CPU/GPU и снижение FPS.
Топология подключения камер к блоку управления
Топология подключения камер определяет физическую и логическую схему соединения периферийных камер кругового обзора с центральным блоком обработки данных. Она напрямую влияет на скорость передачи видеопотоков, помехоустойчивость системы и сложность монтажа.
Основные варианты топологий различаются способом передачи сигнала и организацией кабельных трасс. Выбор конкретной схемы зависит от количества камер, архитектуры бортовой сети и требований к задержкам обработки изображения.
Распространенные схемы подключения
- Звезда (Star Topology): Каждая камера соединяется с блоком управления отдельным кабелем через индивидуальный порт. Преимущества: минимальные задержки передачи данных, простота диагностики неисправностей. Недостаток: повышенный расход кабеля и сложность прокладки.
- Кольцо (Ring Topology): Камеры последовательно соединяются друг с другом единым кабельным шлейфом, начало и конец которого замыкаются на блоке управления. Плюсы: экономия кабеля, отказоустойчивость (при повреждении линии работа части камер сохраняется). Минусы: сложная диагностика обрывов, зависимость всей цепочки от качества каждого соединения.
- Шина (Bus Topology): Все камеры подключаются к одному общему коаксиальному кабелю или витой паре. В современных автомобильных системах применяется редко из-за низкой помехозащищенности и сложности синхронизации данных.
Технические аспекты подключения
Современные системы используют преимущественно цифровые интерфейсы:
- LVDS (Low Voltage Differential Signaling): Высокоскоростная дифференциальная передача по витой паре. Обеспечивает помехозащищенность на больших расстояниях (до 10 м в авто). Требует экранированных кабелей.
- FPD-Link: Специализированный автомобильный стандарт на базе LVDS с поддержкой передачи питания и данных по одному кабелю. Доминирует в топологиях "звезда".
- Ethernet (GbE): Применяется в мультикамерных системах премиум-класса. Позволяет передавать данные от нескольких камер по одному кабелю с временным мультиплексированием (AVB, TSN).
| Топология | Тип кабеля | Макс. кол-во камер | Задержка данных |
|---|---|---|---|
| Звезда | Коаксиальный, витая пара | 4-6 | Минимальная |
| Кольцо | Витая пара (экранированная) | 4 | Средняя |
| Ethernet | CAT5/6 | 6+ | Зависит от коммутатора |
Критические факторы выбора: Экранирование кабелей обязательно для подавления помех от силовых цепей. При топологии "кольцо" применяются камеры со сквозной передачей данных (Camera daisy-chaining). В системах с Ethernet требуется установка автомобильных коммутаторов с поддержкой QoS.
Системы 2D-обзора: базовый вариант
Базовая 2D-система формирует плоское изображение вида сверху, комбинируя видеопотоки с четырех ультраширокоугольных камер: передней, задней и двух боковых (в зеркалах заднего вида). Камеры захватывают зоны непосредственно вокруг автомобиля с углом обзора 120-180° каждая. Электронный блок обрабатывает сигналы, корректируя дисторсию и склеивая картинку в единую проекцию без трехмерного моделирования.
Система активируется автоматически при включении задней передачи или скорости ниже 20 км/ч. На экране мультимедийной системы отображается статичная схема автомобиля с наложенным обзором. Для ориентации выводятся цветные направляющие линии: фиксированные (траектория колес) и динамические (меняющиеся в зависимости угла поворота руля). Отсутствует распознавание объектов или 3D-визуализация.
Ключевые характеристики
| Параметр | Значение |
|---|---|
| Разрешение камер | 640x480 – 1280x720 пикселей |
| Частота обновления | 15-30 кадров/сек |
| Диапазон рабочих температур | -30°C до +80°C |
| Задержка вывода | 0.2-0.5 секунды |
Классификация по функционалу:
- Стандарт: только вид сверху без дополнительных линий
- GuideLine: со статическими/динамическими направляющими
- Multi-View: ручной выбор камеры (перед/зад/бок)
Инструкция по использованию:
- Убедитесь в чистоте объективов камер
- Включите зажигание или запустите двигатель
- Переключитесь на заднюю передачу (автоактивация) или нажмите кнопку «CAM»
- Следите за зонами вблизи бамперов на экране
- Используйте направляющие для оценки траектории
Особенности эксплуатации:
- Загрязнение камер вызывает слепые зоны – регулярно очищайте объективы
- Снижение эффективности в темноте, тумане или сильном дожде
- Невозможность оценки рельефа и высоты препятствий (ямы, бордюры)
- Требует периодической калибровки после замены шин или ремонта подвески
Системы 3D-обзора: построение моделей окружения
Системы 3D-обзора формируют реалистичную трехмерную модель пространства вокруг автомобиля, синтезируя данные с нескольких широкоугольных камер (обычно 4-6), установленных на зеркалах, переднем и заднем бамперах. Алгоритмы компьютерного зрения объединяют видеопотоки в единую сферическую панораму, после чего проецируют изображение на трехмерную виртуальную модель кузова автомобиля и окружающих объектов.
Для создания точной 3D-карты местности применяются методы триангуляции и анализа параллакса, определяющие глубину и габариты препятствий. Дополнительно используются данные ультразвуковых датчиков парковки и гироскопов для коррекции наклона кузова. Система автоматически калибрует камеры при каждом запуске двигателя, компенсируя температурные деформации и изменения давления в шинах.
Ключевые технологии моделирования
- Фотограмметрия – построение 3D-объектов по смещению контрольных точек на перекрывающихся изображениях
- Depth-sensing – расчет дистанции до объектов через анализ искажений известных шаблонов (сетка, контур автомобиля)
- SLAM (Simultaneous Localization and Mapping) – одновременное построение карты среды и определение позиции авто в реальном времени
| Этап обработки | Технологии | Точность |
|---|---|---|
| Сшивка изображений | Feature Matching, Homography | ±2 см по швам |
| Построение карты глубин | Stereo Vision, Neural Networks | 5-15% от дистанции |
| Текстурирование | UV-mapping, PBR-рендеринг | Фотореализм |
Эксплуатационные ограничения связаны с физикой камер: эффективная дальность не превышает 3-5 метров, точность снижается при:
- интенсивных атмосферных осадках
- прямом солнечном свете в объектив
- загрязнении линз
Система автоматически отключает 3D-режим при скорости свыше 20 км/ч, переходя на стандартный круговой обзор.
Интегрированные решения с парктрониками
Интегрированные системы объединяют камеры кругового обзора с ультразвуковыми парктрониками, создавая комплексный мониторинг периметра автомобиля. Датчики парковки, установленные в бамперах, непрерывно сканируют пространство на предмет препятствий, передавая данные в электронный блок управления. Эта информация синхронизируется с видеопотоком от камер, формируя единую интерактивную картину на дисплее мультимедийной системы.
Совместная работа компонентов обеспечивает дублирование функций: камеры визуализируют обстановку, а парктроники количественно оценивают дистанцию до объектов, включая те, что находятся вне зоны видимости оптики (например, низкие бордюры или тонкие столбики). Алгоритмы системы анализируют данные обоих источников, автоматически активируя предупреждающие сигналы при критическом сближении и подсвечивая на экране соответствующие сектора риска.
Ключевые особенности эксплуатации
Совместное использование технологий требует соблюдения специфических правил:
- Калибровка датчиков после замены шин, ударов бампера или изменения клиренса
- Регулярная очистка сенсоров парктроника от грязи, льда и снега
- Контроль за состоянием линз камер – загрязнения искажают оба типа данных
| Тип интеграции | Принцип работы | Преимущества |
|---|---|---|
| Аппаратное объединение | Общий процессор обрабатывает сигналы с камер и парктроников | Минимальная задержка сигнала, синхронное отображение |
| Программная синхронизация | Данные парктроников накладываются поверх видеоряда ПО | Совместимость с мультибрендовыми компонентами |
В условиях плохой видимости (дождь, туман) ультразвуковые датчики компенсируют недостатки оптики, обнаруживая препятствия раньше камер. Однако система не заменяет визуальный контроль – слепые зоны могут сохраняться при сложной геометрии объектов.
Модели с функцией "Взгляд под колеса"
Функция "Взгляд под колеса" (англ. "Under Vehicle View" или "Transparent Hood") – это технология, виртуально устраняющая "слепые" зоны под передними колесами и передней частью автомобиля. Она актуальна для внедорожников, кроссоверов и крупных седанов, где капот или высокий клиренс ограничивают обзор при маневрировании на низкой скорости.
Система достигает эффекта "прозрачности" путем комбинирования данных с камер кругового обзора. Основную роль играют широкоугольные камеры, расположенные под зеркалами заднего вида и в переднем бампере. Их видеопотоки в реальном времени обрабатываются электронным блоком управления (ЭБУ), который синтезирует единое изображение, проецируя вид под днище на экран мультимедийной системы.
Технические особенности и классификация
По принципу реализации выделяют два типа систем:
- Статический "Взгляд под колеса": Показывает фиксированное изображение зоны под передней осью при включении передней камеры или парковочного режима. Использует предзагруженную 3D-модель автомобиля.
- Динамический "Прозрачный капот": Создает эффект "просвечивания" передней части в движении (до 20-30 км/ч). Камера переднего бампера отслеживает рельеф дороги, а ЭБУ накладывает его на виртуальную проекцию капота с учетом угла поворота руля.
Ключевые технические характеристики:
- Разрешение камер: HD (1280x720) или Full HD (1920x1080).
- Угол обзора: 120-180° для фронтальных камер.
- Алгоритмы обработки: Коррекция искажений "рыбий глаз", распознавание линий разметки, цветовое выделение препятствий.
- Активация: Автоматически при скорости ниже 15-20 км/ч или вручную через кнопку "CAM".
Таблица: Применение в автомобильных брендах
| Бренд | Название технологии | Особенности |
|---|---|---|
| Land Rover | ClearSight Ground View | Динамическая проекция рельефа с маркировкой траектории колес |
| Lexus/Toyota | Transparent Hood | Интеграция с системой парковки + виртуальные направляющие |
| BMW | Remote View | 3D-рендеринг подколесных зон через мобильное приложение |
| Nissan | Intelligent Around View | Статический режим "Underfloor" с цветовой индикацией препятствий |
Инструкция по использованию:
- При парковке или движении по бездорожью нажмите кнопку активации камеры.
- На экране выберите режим "Вид под колеса" или "Прозрачный капот".
- Ориентируйтесь на цветные линии (синие/зеленые – безопасная траектория, красные – препятствия).
- Следите за динамической разметкой, которая меняется при повороте руля.
Особенности эксплуатации:
- Функция эффективна только на скоростях до 30 км/ч. На высоких скоростях автоматически отключается.
- Требует чистоты камер: грязь, снег или лед на объективах искажают изображение.
- В темное время суток качество картинки зависит от работы подсветки (инфракрасной или LED).
- Может некорректно отображать объекты на неровном покрытии (глубокие ямы, валуны).
Системы с автоматической активацией по скорости
Данные системы интегрируются с блоком управления автомобиля и анализируют данные о скорости движения через CAN-шину. При достижении заранее заданных скоростных порогов происходит автоматическое переключение режимов отображения или деактивация камер без вмешательства водителя.
Основная функция – обеспечение оптимального обзора на разных этапах движения: на низких скоростях активируется панорамный режим для маневрирования, при наборе скорости система переходит в режим движения с акцентом на потенциальные угрозы.
Ключевые особенности

Скоростные пороги активации:
- Нижний порог (15-20 км/ч): автоматический запуск панорамного обзора при парковке
- Верхний порог (40-60 км/ч): переключение на заднюю камеру или отключение экрана
- Возврат в парковочный режим при снижении скорости ниже 15 км/ч
Технические характеристики:
| Источник данных | CAN/LIN-шина, датчики АБС |
| Время реакции | 200-500 мс после изменения скорости |
| Погрешность срабатывания | ±3 км/ч |
Эксплуатационные ограничения:
- Ручное переопределение автоматики кнопкой на панели
- Невозможность активации панорамы выше 30 км/ч в целях безопасности
- Требование калибровки при замене шин или датчиков скорости
Активация системы через кнопку или селектор КПП
Система кругового обзора активируется преимущественно двумя способами: механической кнопкой на приборной панели или центральной консоли, либо автоматически при переключении селектора коробки передач. Оба метода обеспечивают мгновенное отображение виртуального вида сверху и камер на мультимедийном экране, но отличаются сценариями использования.
Ручная активация осуществляется кратковременным нажатием на физическую или сенсорную кнопку с пиктограммой камеры/автомобиля. Это позволяет включить систему в любой момент движения (например, при маневрировании в узком пространстве). Автоматический запуск происходит при переводе селектора КПП в положение «R» (задний ход), обеспечивая активацию без действий водителя при парковке.
Технические особенности активации
- Кнопочное управление:
- Физические кнопки имеют тактильную обратную связь
- Сенсорные элементы интегрированы в мультимедийные системы
- Активация через КПП:
- Срабатывает при скорости ниже 15-20 км/ч
- Автоматически отключается при начале движения вперед
| Метод активации | Преимущества | Ограничения |
|---|---|---|
| Кнопка | Ручной контроль, работа на малых скоростях вперед | Требует отвлечения от дороги |
| Селектор КПП | Автоматизация, безопасность при парковке | Только для заднего хода |
Система поддерживает дополнительные функции активации: голосовые команды через мультимедийный комплекс, срабатывание при приближении к препятствию (через датчики парковки) или автоматический запуск при открытии двери багажника. Для предотвращения ложных срабатываний программное обеспечение игнорирует переключения КПП на высоких скоростях.
Основные режимы работы: панорама, отдельные камеры
Система кругового обзора функционирует в двух ключевых режимах: панорамном и режиме отдельных камер. Панорамный режим синтезирует изображение с четырех камер (передней, задней, левой и правой) в единую 360-градусную проекцию вида сверху. Режим отдельных камер позволяет вручную активировать трансляцию с конкретной камеры для детализации выбранной зоны.
Переключение между режимами осуществляется через сенсорный интерфейс мультимедийной системы или физические кнопки на панели управления. Автоматическая активация отдельных камер может происходить при определенных условиях: например, задняя камера включается при включении передачи заднего хода, передняя – при движении на низкой скорости с близкими препятствиями.
| Режим | Принцип работы | Типовые сценарии использования |
|---|---|---|
| Панорама | Объединение потоков с камер в реальном времени с коррекцией искажений и наложением на 3D-модель авто | Парковка в ограниченном пространстве, маневрирование в узких дворах, контроль слепых зон при перестроении |
| Отдельные камеры | Вывод необработанного изображения с выбранной камеры (без сшивки и 3D-проекции) | Преодоление крутых подъемов (передняя камера), буксировка прицепа (задняя камера), контроль бордюров при парковке (боковые камеры) |
Технические особенности режимов:
- Разрешение панорамы: 1280×720 пикселей (зависит от модели), частота обновления – 30 кадров/с
- Динамические линии разметки в панорамном режиме: изменяют траекторию при повороте руля
- Режим отдельных камер обеспечивает более высокую детализацию за счет отсутствия цифровой обработки сшивки
Эксплуатационные требования:
- Чистота объективов камер: загрязнения вызывают артефакты в панорамном режиме
- Панорамный режим эффективен только на скоростях до 25 км/ч
- При активации отдельных камер система отключает автоматическое переключение углов обзора
Чтение дополнительных значков на дисплее
Дополнительные значки на дисплее системы кругового обзора визуализируют критические параметры и режимы работы, не отображаемые основными камерами. Они обеспечивают мгновенное распознавание потенциальных угроз, состояния оборудования и активных функций.
Интерпретация символов требует изучения мануала конкретной модели, так как их дизайн и семантика варьируются у разных производителей. Игнорирование значков может привести к повреждению автомобиля или снижению эффективности парковки.
Расшифровка распространённых индикаторов
| Значок | Назначение |
|---|---|
| Жёлтый треугольник с восклицанием | Препятствие в слепой зоне (сопровождается стрелкой направления) |
| Снежинка/капля над камерой | Обледенение или загрязнение объектива (требуется очистка) |
| Перечёркнутый символ камеры | Сбой работы одной из камер или потеря сигнала |
| Автомобиль с дуговыми стрелками | Активирован режим динамических парковочных траекторий |
| R с волнами | Акустическая парковочная система (Parktronic) активна |
Цветовая сигнализация стандартизирована: красный обозначает непосредственную опасность (менее 30 см до объекта), жёлтый – предупреждение (30-70 см), зелёный – безопасную дистанцию. Мигающие иконки указывают на необходимость срочного вмешательства.
Прямая и прерывистая разметка для парковки
Прямая (сплошная) разметка обозначает фиксированные границы парковочного места, строго определяя его длину и ширину. Она применяется на стационарных парковках, где важно точное позиционирование транспортных средств для обеспечения безопасности и рационального использования пространства. Пересекать такую разметку запрещено – автомобиль должен размещаться строго внутри обозначенных линий без их наезда.
Прерывистая разметка состоит из коротких штрихов с равными интервалами и используется на временных или маневренных парковочных зонах. Она допускает незначительное пересечение линий при парковке или выезде, обеспечивая гибкость при размещении крупногабаритного транспорта. Чаще встречается на паркингах торговых центров или участках с переменной загрузкой, где требуется адаптация под разные типы автомобилей.
Ключевые отличия и правила применения
Особенности эксплуатации:
- Прямая разметка требует точного позиционирования: колеса не должны касаться линий, а габариты ТС – выходить за пределы обозначенной зоны.
- Прерывистая разметка разрешает частичное пересечение линий при условии, что автомобиль не создает помех соседним машинам и не блокирует проезд.
Технические характеристики:
| Параметр | Прямая разметка | Прерывистая разметка |
|---|---|---|
| Ширина линии | 10-15 см | 10-15 см |
| Длина штриха/интервал | Непрерывная линия | 50 см штрих / 50 см интервал |
| Цвет | Белый (стандарт), желтый (временная) | Белый (стандарт), желтый (временная) |
Инструкция по использованию:
- При парковке внутри прямых линий контролируйте габариты по зеркалам или камерам кругового обзора.
- В зонах с прерывистой разметкой допускается смещение до 20 см за линию при заезде/выезде.
- Избегайте парковки вплотную к сплошным линиям при наличии прерывистых на соседних местах – это затруднит доступ к соседним автомобилям.
Переключение камер при маневрировании
При выполнении маневров система кругового обзора автоматически активирует наиболее релевантные камеры для конкретной ситуации. Основным триггером служит положение рулевого колеса: при повороте более чем на 90 градусов влево или вправо система мгновенно переключает дисплей на вид с соответствующей боковой камеры. Это позволяет контролировать "мертвые зоны" в направлении поворота, особенно критичные при въезде на парковочное место или проезде узких участков.
Дополнительным фактором автоматического переключения выступает активация поворотников. При включении левого или правого указателя поворота на скорости ниже 25 км/ч система принудительно выводит на экран изображение с камеры выбранной стороны. Одновременно синхронизируется работа ультразвуковых датчиков парковки, предупреждающих о препятствиях звуковыми сигналами и графической индикацией на экране.
Режимы работы и управление
Система поддерживает два ключевых сценария переключения:
- Автоматический режим (стандартный):
- Переключение на камеру заднего вида при включении передачи R
- Активация фронтальной камеры при движении вперед со скоростью < 15 км/ч
- Принудительный вывод боковых камер при повороте руля или использовании поворотников
- Ручное управление (через кнопки мультимедиа):
- Принудительная активация любой камеры через интерфейс
- Фиксация выбранного ракурса на время до 10 секунд
- Возможность одновременного вывода 2-4 видов (режим split-screen)
Важно: при автоматическом переключении основной экран разделяется на две зоны – в основной отображается вид с активной камеры маневрирования, во второстепенной (обычно в углу) сохраняется панорамное изображение с топ-даун проекции для оценки общего положения автомобиля.
| Действие водителя | Активируемая камера | Дополнительные функции |
|---|---|---|
| Поворот руля влево >90° | Левая боковая | Траекторные линии, усиление УЗ-датчиков |
| Включение правого поворотника | Правая боковая | Мигающая зона риска на экране |
| Переключение на R (задний ход) | Задняя + панорама 360° | Динамическая разметка траектории |
| Движение вперед <15 км/ч | Передняя + панорама 360° | Активация всех парктроников |
Особенность эксплуатации заключается в автоматическом отключении принудительных видов камер при превышении пороговой скорости (обычно 25-30 км/ч) – система возвращается к стандартному круговому обзору или отключает дисплей для предотвращения отвлечения водителя. При повторном снижении скорости ниже порогового значения последний активный режим маневрирования восстанавливается автоматически.
Использование системы при парковке задним ходом
При активации задней передачи система автоматически переключает дисплей на обзор зоны за автомобилем, проецируя широкоугольное изображение с камеры багажника. Динамические направляющие линии на экране синхронизируются с поворотом руля, визуализируя траекторию движения колес и прогнозируемый путь авто. Статичные маркеры обозначают габаритную ширину кузова, помогая оценить дистанцию до бордюров или соседних машин.
Парковочные сенсоры дополняют картинку звуковыми сигналами, частота которых нарастает при приближении к препятствию. В системах с 3D-режимом доступен виртуальный вид сверху, объединяющий данные с камер по периметру для контроля "мертвых зон". Экран отображает цветовую маркировку объектов: зеленый – безопасная дистанция, желтый – требующая внимания (0.5-1 м), красный – критическое сближение (менее 0.5 м).
Алгоритм действий
- Остановиться, включить заднюю передачу и дождаться стабилизации изображения на дисплее
- Оценить обстановку по цветным зонам и звуковым оповещениям
- Начинать движение на низкой скорости (5-7 км/ч), отслеживая смещение направляющих линий
- Корректировать траекторию по данным о расстоянии до объектов
- Остановиться при появлении красной зоны вблизи препятствия
| Элемент системы | Функция при парковке |
|---|---|
| Широкоугольная камера | Обзор 120-180° для контроля пространства позади авто |
| Динамические линии | Прогнозирование траектории в реальном времени |
| Ультразвуковые датчики | Точное измерение дистанции до препятствий |
Особенности эксплуатации: Система требует чистых камер и датчиков – загрязнения снижают точность. В темное время суток эффективность обеспечивает инфракрасная подсветка, но при ярком встречном свете возможны блики. Не заменяет визуальный контроль через зеркала – всегда проверяйте "слепые" зоны поворотом головы.
Движение в узких проездах со всеракурсным обзором
При преодолении узких проездов система кругового обзора (360°) становится критически важным инструментом, объединяя данные с камер в бамперах, зеркалах и задней части авто в единую панораму. Она визуализирует слепые зоны в реальном времени, отображая на мультимедийном экране положение машины относительно бордюров, столбов, припаркованных ТС и других препятствий с точностью до 10-20 см.
Особое значение имеет режим "Вид сверху", который деформирует перспективу для демонстрации зазоров между кузовом и объектами. При движении между стенами гаражей, сквозь арки или вдоль плотного ряда автомобилей система автоматически активирует камеры, проецируя траекторию колес и прогнозируемую линию движения с учетом текущего угла поворота руля.
Тактика безопасного маневрирования
Ключевые этапы проезда:
- Активация при приближении: снизьте скорость до 5-10 км/ч – система автоматически выведет обзор 360° на экран.
- Контроль статичных объектов: ориентируйтесь на цветные линии разметки (обычно желтая/красная для критичных дистанций).
- Динамика маневра:
- Держите в фокусе проекцию передних колес для предотвращения наезда на бордюр
- Следите за смещением заднего свеса при поворотах
- Корректируйте траекторию при сближении с препятствиями менее 30 см
Технические ограничения в стесненных условиях:
| Фактор | Риск | Компенсация |
|---|---|---|
| Искажение у краев линз | Неточное отображение объектов в 5-10 см от камеры | Дублирование контроля через зеркала |
| Низкие препятствия (бордюр, тумбы <40 см) | Частичное попадание в мертвую зону камер | Использование датчиков парковки с звуковой индикацией |
| Резкие перепады освещения | "Зашумливание" изображения в арках/тоннелях | Включение ПТФ для стабилизации картинки |
Эксплуатационные рекомендации: Всегда очищайте объективы камер перед сложным маневром – грязь провоцирует ошибки в определении дистанции. При движении вдоль сплошных стен (бетонные заборы, гаражные боксы) доверяйте системе менее 80% из-за оптических аберраций на плоских поверхностях. Для гарантированного отсутствия контакта с препятствиями добавляйте 15-20% к визуализируемым на экране расстояниям.
Проверка углов в режиме разделенного экрана
Режим разделенного экрана (Split View) позволяет одновременно отображать на дисплее мультимедийной системы автомобиля изображения с нескольких камер кругового обзора, сфокусированные на конкретных зонах вокруг транспортного средства. Это особенно полезно для детального контроля угловых участков (передних и задних), где традиционно существуют "слепые" зоны при использовании только зеркал или одиночного обзорного кадра.
Основная цель проверки углов в данном режиме – обеспечить визуальное подтверждение отсутствия препятствий в критически важных точках при выполнении сложных маневров: парковки в стесненных условиях, проезда узких проездов, движения на перекрестках с ограниченной видимостью или при перестроении в плотном потоке. Система программно формирует комбинированное изображение, например, левого переднего и правого заднего углов, либо всех четырех углов одновременно, в зависимости от реализации.
Порядок действий для проверки углов
- Активация режима: Переключитесь в режим кругового обзора через меню мультимедиа-системы или специальную кнопку. Выберите опцию "Split View", "Углы" или аналогичную (название зависит от производителя).
- Выбор схемы отображения: Определите нужную конфигурацию экрана (например: передние углы + вид сверху, задние углы + парковочные линии, все 4 угла).
- Визуальная оценка: Внимательно проанализируйте каждую зону на экране:
- Передние углы: Контролируйте близость бордюров, столбов, низких препятствий.
- Задние углы: Убедитесь в отсутствии других ТС, пешеходов, велосипедистов при начале движения.
- Совмещение с другими средствами: Используйте изображение совместно с парковочными сенсорами (их сигналы часто проецируются на экран) и поворотом головы для перекрестной проверки.
Особенности эксплуатации: Качество отображения углов напрямую зависит от чистоты объективов камер и освещенности. В темное время суток или при сильном дожде/снеге эффективность снижается. Помните, что система показывает статичную картинку – движущиеся объекты могут выйти из зоны видимости камеры между обновлениями изображения. Никогда не полагайтесь исключительно на камеры, всегда дублируйте визуальный осмотр через окна.
| Параметр | Характеристика | Примечание |
|---|---|---|
| Зона охвата камер угла | ~120-150 градусов | Широкоугольные объективы с дисторсией |
| Частота обновления | 15-30 кадров/сек | Задержка ≈0.1-0.3 сек |
| Минимальная дистанция обнаружения | 0.1-0.3 м | Зависит от модели камеры |
Обход колесных арок при парковке
Система кругового обзора (SVM) существенно упрощает парковку, особенно при маневрах вблизи высоких бордюров или препятствий, способных повредить диски или низ бампера. Камеры, установленные в передней и задней частях автомобиля, а также в зеркалах заднего вида, формируют панорамное изображение, но критически важным для сохранности колесных арок и дисков является правильная интерпретация расстояния до вертикальных объектов.
Основная сложность заключается в том, что стандартное "птичье гнездо" на экране мультимедийной системы показывает зону непосредственно под бамперами и вдоль бортов, однако точное позиционирование колес относительно высокого бордюра или столба требует внимания к специфическим меткам или режимам отображения. Неверная оценка расстояния при повороте руля может привести к контакту арки или обода колеса с препятствием.
Принципы безопасного маневрирования
Для минимизации рисков используйте следующие рекомендации:
- Активируйте вид сбоку: Переключитесь в режим отображения камеры соответствующего борта (левого/правого) при подъезде вплотную к бордюру или узкому препятствию. Эта проекция дает более точную визуализацию зазора между колесом и объектом.
- Ориентируйтесь на динамические линии: Включите опцию направляющих линий, меняющих кривизну в зависимости от угла поворота руля. Удерживайте траекторию так, чтобы препятствие оставалось с внешней стороны изгиба линии, соответствующей траектории колеса.
- Контролируйте статические метки расстояния: Цветные секторы (обычно красный/желтый/зеленый) на изображении обозначают зоны опасной, средней и безопасной близости. Держите препятствие в зеленой зоне при движении параллельно ему.
Особенности эксплуатации: Помните, что камеры имеют "мертвые зоны" в непосредственной близости от колес (0.3-0.5 м). При движении на очень малой скорости (<5 км/ч) дублируйте визуальный контроль через зеркала или кратковременно опустите стекло для оценки дистанции "на глаз". Избегайте полного доверия системе в условиях:
- Сильного загрязнения объективов камер.
- Ночью или при контровом освещении, снижающем детализацию.
- При наличии очень тонких препятствий (арматура, цепи), которые могут не распознаться алгоритмами.
| Ситуация | Действие | Риск при игнорировании |
|---|---|---|
| Параллельная парковка у высокого бордюра | Включить вид камеры ближнего борта, контролировать расстояние по статичным маркерам | Царапины на дисках, повреждение покрышки о острый край |
| Заезд в узкий карман между столбами | Использовать попеременный просмотр левого/правого видов, отслеживая динамические линии | Удар ступицей или боковиной колеса о препятствие, деформация обода |
Ручная калибровка изображения после замены шин
Замена шин, особенно с переходом на другой типоразмер или профиль, может нарушить геометрию колесной базы и изменить углы установки колес. Это приводит к искажению перспективы на экране системы кругового обзора, поскольку виртуальная "точка схода" камер смещается относительно реального положения объектов. Ручная калибровка компенсирует эти отклонения, восстанавливая точность проекции "вид сверху" и корректность линий разметки.
Необходимость процедуры возникает при замене всех четырех шин, установке запаски иного диаметра, изменении давления в шинах за пределы допуска производителя (обычно ±0.2 бара), а также после ремонтов, затрагивающих подвеску или рулевое управление. Игнорирование калибровки провоцирует ошибки в определении дистанции до препятствий и некорректное отображение траектории движения.
Инструкция по выполнению ручной калибровки
Перед началом подготовьте:
- Ровную горизонтальную площадку с твердым покрытием (уклон ≤1°);
- Калибровочные мишени (обычно входят в комплект или распечатываются);
- Рулетку для точной разметки зоны установки мишеней.
Последовательность действий:
- Установите рекомендованное давление во всех шинах.
- Разместите транспортное средство в центре площадки, выровняв руль строго по оси движения.
- Расположите мишени вокруг автомобиля согласно схеме производителя (обычно 4-6 штук на расстоянии 1-3 метра от бортов).
- Активируйте режим калибровки через сервисное меню мультимедийной системы (требует диагностического ПО или комбинации клавиш).
- Следуя инструкциям на экране, последовательно откалибруйте каждую камеру:
- Система захватит изображение мишени;
- Вручную совместите маркеры на экране с эталонными точками мишени.
- Подтвердите сохранение параметров после проверки всех камер.
Ключевые особенности эксплуатации после калибровки:
| Проверка точности | Протестируйте систему у препятствий с известными габаритами (например, конусы). Расхождения >10% требуют повторной калибровки. |
| Частота выполнения | Помимо замены шин, рекомендована при сезонной смене резины или каждые 15 000 км пробега. |
| Ограничения | Невозможна при поврежденных камерах, неисправностях CAN-шины или изменении клиренса (лифт/дроп подвески). |
Важно: Некоторые системы требуют статической калибровки на стенде (с измерением углов развала/схождения) перед ручной настройкой изображения. Всегда сверяйтесь с мануалом конкретного автомобиля.
Особенности работы ночью ИК-подсветкой
Инфракрасная подсветка активируется автоматически при снижении уровня естественного освещения ниже порогового значения, обеспечивая камерам системы кругового обзора возможность формирования четкого изображения в полной темноте. ИК-светодиоды излучают волны в невидимом для человеческого глаза диапазоне (обычно 850-940 нм), что исключает ослепление водителя и окружающих, сохраняя скрытность подсветки.
Эффективность ИК-излучения напрямую зависит от чистоты линз светодиодов и оптики камер: загрязнения снегом, пылью или грязью снижают дальность подсветки до 40%. Максимальная дистанция освещения (обычно 5-15 метров) также определяется мощностью ИК-элементов и их углом рассеивания, который должен соответствовать полю обзора камеры для равномерного покрытия периметра автомобиля.
Ключевые эксплуатационные аспекты
| Фактор | Влияние на работу | Рекомендации |
|---|---|---|
| Атмосферные явления | Дождь/туман рассеивают ИК-лучи, создавая «снег» на изображении | Уменьшить скорость движения, проверить чистоту линз |
| Посторонние ИК-источники | Фары других авто, уличные камеры вызывают засветы | Временно отключить авто-режим подсветки |
| Температурный режим | Мороз ниже -25°C снижает яркость светодиодов | Контролировать состояние аккумулятора |
Критические ограничения технологии:
- Не распознает цветовые различия объектов (изображение монохромное)
- Слабая эффективность на отражающих поверхностях (лед, мокрый асфальт)
- Задержка активации (0.5-2 сек) при резкой смене освещенности
Для оптимальной работы перед ночной поездкой обязательно очистите ИК-светодиоды, расположенные в корпусах камер, сухой салфеткой. При парковке в условиях густого тумана используйте ручное управление подсветкой через меню системы, принудительно повышая интенсивность излучения.
Очистка линз камер зимой: безопасные методы
Чистота линз камер кругового обзора критична зимой для корректной работы системы. Загрязнение снегом, льдом, реагентами или конденсатом искажает изображение, провоцирует сбои в формировании панорамы и создает риски при парковке или маневрировании. Регулярное удаление загрязнений гарантирует точность картинки и безопасность.
Используйте только щадящие методы очистки, исключающие повреждение защитного покрытия линз и корпусов камер. Агрессивные химикаты, абразивы или механическое воздействие приводят к появлению царапин, нарушению гидрофобного слоя и преждевременному выходу оборудования из строя. Приоритет – безопасность для оптики и электроники.
Рекомендуемые способы очистки
Следуйте проверенным алгоритмам для сохранения функциональности камер:
- Предварительный прогрев: Активируйте обогрев камер (при наличии) или двигатель авто на 5–10 минут. Тепло растапливает наледь без механической очистки.
- Мягкая щетка или салфетка: Смахните рыхлый снег чистой щеткой с мягким ворсом (например, для объективов). Для влажных загрязнений применяйте микрофибру без ворсинок.
- Специализированные автосредства: Распылите неагрессивный очиститель для стекол или оптики на салфетку (не на линзу!), аккуратно протрите поверхность круговыми движениями.
Запрещенные методы и риски:
| Метод | Последствия |
|---|---|
| Горячая вода | Термический шок, трещины на линзе/корпусе |
| Лопатки, скребки | Царапины, повреждение гидрофобного покрытия |
| Уайт-спирит, растворители | Разрушение оптического слоя, помутнение |
| Жесткие ткани, бумага | Микроцарапины, снижение светопропускания |
Профилактика: Наносите защитные составы (антиобледенители, гидрофобные спреи) на чистые сухие линзы перед зимним сезоном. Регулярно проверяйте герметичность корпусов камер и целостность уплотнителей для предотвращения попадания влаги внутрь.
Обработка воды и грязи при ливневых дождях
Система кругового обзора автомобиля критически уязвима к воздействию ливневых осадков и грязи. Капли воды, потоки грязи и брызги от колес создают искажения на изображении камер, частично или полностью блокируя обзор. Это приводит к снижению точности формирования панорамного вида и повышает риски при парковке или маневрировании в сложных условиях.
Для минимизации последствий применяются технические решения: камеры оснащаются водоотталкивающими сапфировыми стеклами с олеофобным покрытием, предотвращающим налипание капель. В премиум-системах используется подогрев объективов для быстрого испарения влаги и таяния снега. Алгоритмы обработки изображений компенсируют искажения с помощью фильтрации шумов, цифровой стабилизации и динамической коррекции контраста в реальном времени.
Инструкция по эксплуатации и особенности обслуживания
Рекомендуемые действия водителя:
- Активируйте режим "Парковка" до въезда в глубокие лужи для предварительной калибровки камер
- При постоянном загрязнении экрана используйте ручной режим обзора (выбор камеры вручную)
- Избегайте химической мойки струей высокого давления ближе 30 см к камерам
Критические ограничения:
- Система не заменяет визуальный контроль – при сильном ливне обязателен дублирующий осмотр
- Автоматическая коррекция изображения работает только при скорости до 20 км/ч
- Загрязнение более 50% площади объектива вызывает отключение ассистентов парковки
| Проблема | Решение | Периодичность обслуживания |
|---|---|---|
| Налет грязи на камерах | Ручная очистка микрофибровой салфеткой | После каждой поездки в дождь |
| Снижение гидрофобных свойств | Нанесение спецпокрытия (типа "Антидождь") | Каждые 6 месяцев |
| Конденсат в корпусе камеры | Замена уплотнителей на СТО | При обнаружении запотевания |
Системные ограничения при сильной тряске
Вибрации и резкие колебания автомобиля напрямую влияют на работу камер кругового обзора. При движении по бездорожью, неровностям или при преодолении препятствий возникают физические смещения оптических элементов, что приводит к искажению передаваемого изображения. Сенсоры камер, особенно широкоугольные, не успевают корректно адаптироваться к изменяющемуся положению относительно дорожного покрытия.
Электронные компоненты системы сталкиваются с дополнительными сложностями при обработке сигнала в условиях тряски. Алгоритмы сшивания панорамного изображения из потоков нескольких камер требуют стабильных опорных точек для точного совмещения. Резкие перемещения кузова нарушают синхронизацию между отдельными камерами, вызывая артефакты на финальной картинке – разрывы линий, "плавающие" объекты или временную потерю целостности обзора.
Ключевые ограничения и последствия
- Геометрические искажения: Изменение угла наклона камер относительно горизонта приводит к "прыганию" линий парковочной разметки и контуров объектов на экране.
- Задержка обновления данных: Процессор может пропускать кадры или замедлять частоту обновления изображения (с 30 до 15 FPS и ниже) для попытки коррекции артефактов.
- Ошибки парковочных линий: Динамические направляющие, проецируемые на видео, теряют точность из-за некорректного расчета расстояний при колебаниях подвески.
- Временный отказ датчиков: Сильная вибрация может вызывать ложные срабатывания ультразвуковых парктроников, интегрированных с системой, или их кратковременную деактивацию.
| Фактор воздействия | Влияние на систему | Риск для водителя |
|---|---|---|
| Продольная раскачка (ямки, "гребенка") | Рассогласование передней/задней камер, вертикальные смещения изображения | Ошибки оценки дистанции до препятствий |
| Боковой крен (перекосы, колейность) | Искажение перспективы боковых камер, "заваливание" картинки | Некорректное отображение зон слепых пятен |
| Высокочастотная вибрация (гравий, брусчатка) | "Дрожание" всего изображения, снижение детализации | Трудности идентификации мелких объектов у бордюров |
Важно: В экстремальных условиях система не заменяет визуальный контроль! При постоянной тряске рекомендуется останавливаться для парковочных маневров или переключаться на ручной мониторинг через боковые зеркала.
Производители компенсируют эти ограничения программными методами (цифровая стабилизация, predictive alignment) и улучшением креплений камер, но физические законы накладывают фундаментальные ограничения на работу любой оптико-электронной системы в условиях механических колебаний.
Поведение системы в экстренных ситуациях
Система кругового обзора (СКО) не является системой активной безопасности и не подменяет водителя при принятии решений в критических ситуациях. Её основная задача – предоставление визуальной информации об обстановке вокруг автомобиля в формате "вид сверху" или разделённого экрана, что помогает оценить дистанцию до статичных и динамичных объектов при маневрировании на низких скоростях.
При возникновении экстренных ситуаций (резкое торможение, занос, риск столкновения) СКО продолжает работу в штатном режиме, транслируя изображение с камер, но не предпринимает автоматических действий по управлению автомобилем. Система не способна прогнозировать развитие аварийной ситуации, анализировать динамику движения или инициировать экстренное торможение/руление. Ответственность за контроль над транспортным средством полностью сохраняется за водителем.
Ключевые ограничения и особенности работы
Отсутствие прогнозирования и реактивных действий: СКО функционирует как пассивный информационный дисплей. Она не:
- Выдаёт звуковые предупреждения о возможных столкновениях (это функция парктроника или систем мониторинга слепых зон)
- Берёт на себя управление тормозами, рулевым управлением или двигателем
- Анализирует траектории движения других объектов для расчёта риска ДТП
Задержка изображения: В большинстве систем существует незначительная (доли секунды) задержка между реальным событием и его отображением на экране. В динамично развивающейся аварийной ситуации эта задержка может снизить полезность предоставляемой информации.
Ограничения по скорости: Многие системы автоматически отключают режим "вид сверху" при превышении определённого порога скорости (обычно 10-25 км/ч), переключаясь только на изображение с фронтальной или задней камеры, либо вовсе отключая дисплей. Это связано с фокусом системы на маневрировании, а не на движении в потоке.
Влияние внешних факторов: Эффективность СКО резко падает при условиях, ухудшающих работу камер:
- Плохая видимость: Сильный дождь, снегопад, туман, запотевание или загрязнение линз камер
- Сложное освещение: Прямой солнечный свет в объектив, резкие тени, недостаточная освещённость ночью
- Физические помехи: Наклейки, снег, лёд или грязь, полностью закрывающие одну или несколько камер
Рекомендации для водителя:
- Не полагайтесь исключительно на изображение с СКО в экстренном случае. Всегда используйте зеркала заднего вида и визуальный осмотр через окна.
- Помните, что система показывает прошлое состояние окружающей обстановки из-за задержки обработки видео.
- При срабатывании систем активной безопасности (ABS, ESP, автоматическое торможение) сосредоточьтесь на управлении автомобилем, а не на экране СКО.
- Содержите линзы камер в чистоте для обеспечения работоспособности системы в любой момент.
Регламентная диагностика блока обработки
Плановые проверки электронного модуля системы кругового обзора проводятся согласно регламенту производителя, обычно каждые 15 000–20 000 км пробега или ежегодно. Диагностика включает аппаратное тестирование схемы на целостность контактов, отсутствие коррозии разъёмов и перегрева компонентов, а также программную верификацию прошивки на наличие ошибок и актуальность версии ПО. Обязательно выполняется калибровка камер после замены шин или ремонта подвески для сохранения точности сшивки изображения.
Используется специализированное диагностическое оборудование: мультиметры для замера напряжения в цепи питания, осциллографы для анализа сигналов шин CAN/LIN, сканеры с ПО производителя (например, Delphi DS150E или Bosch KTS). Проверяются журналы ошибок ECU на предмет кодов неисправностей (типовые: U1000 – потеря связи, B1007 – сбой обработки видео), параллельно тестируется реакция системы на имитацию помех электропитания. Особое внимание уделяется целостности экранировки кабелей возле генератора и катушек зажигания.
Процедура диагностики
- Подготовка: Прогрев блока до рабочей температуры (+15…+30°C), отключение нештатных потребителей энергии
- Аппаратный анализ:
- Замер сопротивления на разъёмах (номинал: 0.1–0.5 Ом)
- Контроль напряжения питания (12.8±0.4V при работающем двигателе)
- Визуальный осмотр платы на вздутие конденсаторов
- Функциональное тестирование:
- Активация режима симуляции помех (проверка подавления артефактов)
- Проверка реакции на переключение режимов (парковка/движение)
| Параметр | Норма | Критичное отклонение |
| Потребляемый ток | 120–180 мА | >250 мА |
| Частота обновления | 25–30 кадр/с | <20 кадр/с |
| Задержка вывода | 0.1–0.3 с | >0.5 с |
Особенности эксплуатации: При выявлении сбоев ПО выполняется перепрошивка через OBD-II, но при физических повреждениях микросхем (например, графического процессора) требуется замена модуля. Для предотвращения отказов запрещается мойка двигателя высоким давлением и самостоятельная разборка корпуса блока. В зимний период критичен контроль влажности в зоне установки ECU – конденсат вызывает короткие замыкания.
Список источников
- Техническая документация производителей систем кругового обзора (Bosch, Valeo, Continental, Panasonic)
- Специализированные учебные пособия по автомобильной электронике и системам помощи водителю (ADAS)
- Научные статьи и исследования в журналах по автомобилестроению (SAE Technical Papers, IEEE Transactions)
- Официальные руководства по эксплуатации автомобилей с системой кругового обзора от автопроизводителей (Toyota, BMW, Mercedes-Benz и др.)
- Отраслевые стандарты и нормативы (ISO 17387, ГОСТ Р 41.46, ECE R46)
- Монографии по компьютерному зрению и обработке изображений в транспортных системах
- Отчёты независимых испытательных организаций (Euro NCAP, Thatcham Research)
- Материалы международных конференций по интеллектуальным транспортным системам (ITS)
- Технические обзоры и аналитика от профильных автомобильных изданий (Automotive News, Auto Bild)
- Патентная документация на системы панорамного обзора и калибровки камер