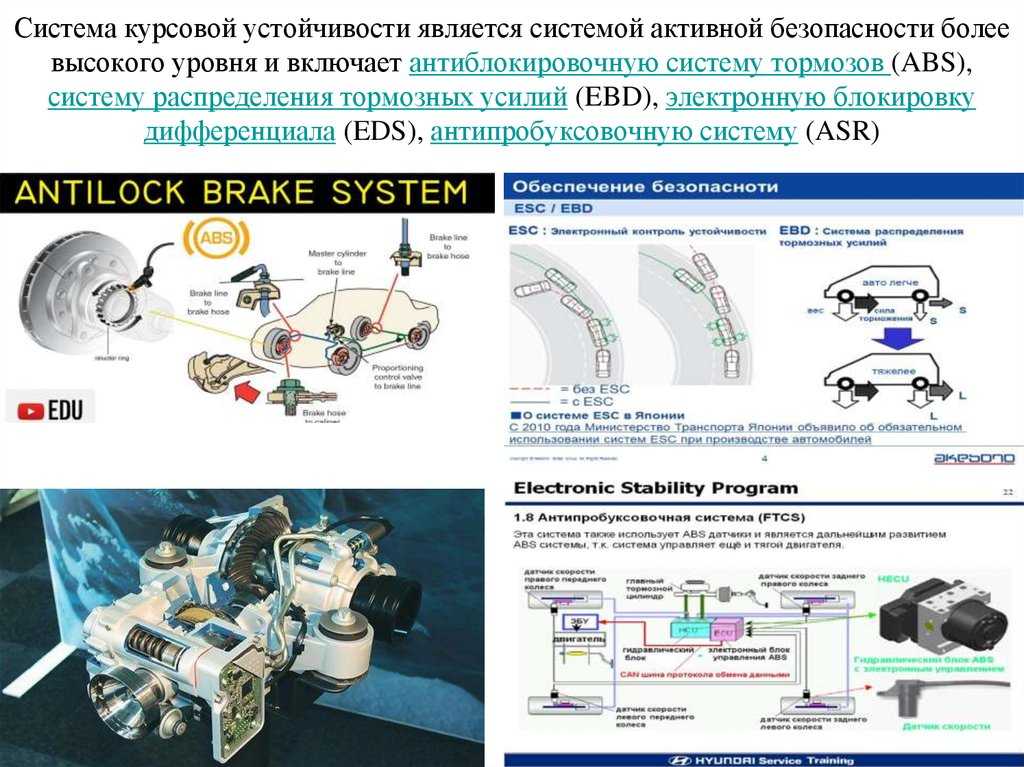
Система курсовой устойчивости - установка и принцип работы в деталях
Статья обновлена: 28.02.2026
Система курсовой устойчивости (ESC, ESP, VSC) - электронный комплекс активной безопасности, предотвращающий занос и потерю контроля над автомобилем при резких маневрах или на скользком покрытии.
Принцип работы основан на постоянном анализе данных о направлении движения, скорости вращения колес и боковых ускорениях. При обнаружении расхождения между действиями водителя и траекторией авто, система автоматически подтормаживает отдельные колеса и корректирует мощность двигателя.
В статье детально рассмотрены устройство ESC, алгоритм ее функционирования, особенности монтажа дополнительного оборудования и практические аспекты эксплуатации.
Базовое определение системы курсовой устойчивости (ESC/VSC/DSC)
Система курсовой устойчивости (СКУ) – электронный активный помощник водителя, предотвращающий потерю контроля над автомобилем при экстренных маневрах или на скользком покрытии. Её основная задача – автоматически корректировать траекторию движения, компенсируя заносы и сносы при отклонении от заданного курса.
Функционирование основано на постоянном анализе данных от группы датчиков: угла поворота руля, скорости вращения колёс, бокового ускорения и рыскания (yaw rate). Электронный блок управления (ЭБУ) сравнивает реальное поведение авто с расчётной моделью. При несовпадении параметров система мгновенно вмешивается в управление.
Принципы работы и ключевые компоненты

Для стабилизации автомобиля СКУ использует два основных метода:
- Избирательное подтормаживание колёс – подача тормозного усилия на конкретное колесо через гидравлический модулятор ABS
- Коррекция тяги двигателя – уменьшение крутящего момента путём дросселирования или пропуска впрыска топлива
| Компонент системы | Назначение |
|---|---|
| Датчик рыскания | Фиксирует угловую скорость авто вокруг вертикальной оси |
| Датчик поперечного ускорения | Измеряет силу бокового смещения кузова |
| Гидравлический блок | Создаёт давление в тормозных контурах отдельных колёс |
| ЭБУ двигателя и АБС | Синхронизируют работу тормозов и силового агрегата |
Важно отметить различия в названиях: ESC (Electronic Stability Control) – общепринятый термин, VSC (Vehicle Stability Control) используется Toyota, а DSC (Dynamic Stability Control) – обозначение у BMW и Jaguar. Несмотря на брендинг, все системы сохраняют единый функционал и соответствуют международным стандартам безопасности.
Главный принцип работы: контроль поведения через управление тормозами и тягой
Система курсовой устойчивости (ESC) непрерывно анализирует данные от датчиков: угла поворота руля, поперечного ускорения, скорости вращения каждого колеса и рысканья (поворота вокруг вертикальной оси). Эти показатели сравниваются с расчетной моделью движения, заданной водителем через рулевое колесо.
При обнаружении отклонений (например, начало заноса или сноса) ESC мгновенно вычисляет необходимые корректирующие воздействия. Для стабилизации траектории система избирательно притормаживает отдельные колеса и/или снижает крутящий момент двигателя, не дожидаясь реакции водителя.
Механизмы реализации контроля
- Избирательное торможение колес: Гидравлический блок по команде ЭБУ создает давление в тормозных контурах конкретных колес:
- При заносе (задняя ось теряет сцепление) – торможение внешнего переднего колеса
- При сносе (передняя ось теряет сцепление) – торможение внутреннего заднего колеса
- Коррекция тяги двигателя: Через шину CAN система отправляет запрос блоку управления двигателем на:
- Снижение крутящего момента (принудительное сбрасывание газа)
- Притормаживание ведущих колес при пробуксовке
| Ситуация | Действие ESC | Результат |
|---|---|---|
| Избыточная поворачиваемость (занос) | Торможение внешнего переднего колеса | Гашение вращательного момента, возврат задней оси на траекторию |
| Недостаточная поворачиваемость (снос) | Торможение внутреннего заднего колеса + снижение тяги | Создание стабилизирующего момента, восстановление сцепления передних колес |
Основное отличие от антиблокировочной системы тормозов (ABS)
ABS предотвращает блокировку колёс при торможении, сохраняя управляемость автомобиля. Её действие ограничено только ситуациями интенсивного замедления. Система курсовой устойчивости (ESC/ESP) использует ABS как компонент, но решает принципиально иную задачу: сохранение траектории движения и предотвращение заноса.
ESC постоянно анализирует поведение автомобиля в поворотах, при разгоне и маневрировании, а не только при торможении. Для этого она задействует дополнительные датчики и активное вмешательство в работу двигателя, что выходит за рамки функционала ABS.
Ключевые различия
| Критерий | ABS | ESC |
|---|---|---|
| Основная цель | Контроль торможения | Контроль устойчивости и траектории |
| Условия работы | Только при торможении | Любой режим движения (поворот, разгон) |
| Управление двигателем | Нет | Да (снижение мощности) |
| Дополнительные датчики | Нет |
|
| Тип воздействия | Корректировка тормозного усилия | Комплексное торможение отдельных колёс и коррекция тяги двигателя |
Отличие от противобуксовочной системы (TCS)
Противобуксовочная система (TCS) сфокусирована исключительно на предотвращении пробуксовки ведущих колес автомобиля при разгоне. Ее задача – обеспечить оптимальное сцепление с дорогой, когда водитель резко нажимает на педаль газа, особенно на скользком покрытии (лед, снег, мокрая дорога). Система распознает проскальзывание колес с помощью датчиков ABS и реагирует, снижая крутящий момент двигателя или притормаживая буксующее колесо.
Система курсовой устойчивости (ESC) решает принципиально иную задачу: сохранение управляемости и траектории движения автомобиля в сложных условиях (резкие повороты, объезд препятствий, потеря сцепления). В отличие от TCS, которая работает только при разгоне, ESC активна постоянно – при разгоне, торможении и движении накатом. Она использует не только датчики ABS, но и дополнительные сенсоры (угла поворота руля, поперечных ускорений, рыскания), анализируя реальное направление движения и намерения водителя.
Ключевые различия ESC и TCS
- Главная цель: TCS борется с пробуксовкой колес. ESC предотвращает занос или снос автомобиля.
- Область работы: TCS активируется только при разгоне. ESC работает в любых режимах движения.
- Методы воздействия: TCS снижает мощность двигателя или тормозит буксующие ведущие колеса. ESC избирательно притормаживает любое колесо (включая неведущие) для коррекции траектории.
- Интеграция: ESC включает TCS как подсистему. Наличие ESC подразумевает работу TCS, но не наоборот.
- Датчики: TCS использует датчики скорости вращения колес. ESC дополняет их сенсорами угла поворота руля, рыскания и поперечного ускорения.
Центральный компонент системы: электронный блок управления (ЭБУ)
ЭБУ выступает "мозгом" системы курсовой устойчивости (ESC), непрерывно обрабатывая данные от сети датчиков. Он вычисляет фактическое движение автомобиля и сравнивает его с заданной траекторией, определяемой углом поворота руля и скоростью. При обнаружении отклонений (например, заноса или сноса) блок мгновенно рассчитывает корректирующие воздействия.
Мощный микропроцессор ЭБУ анализирует показания с частотой до 100 раз в секунду, включая информацию от датчиков:
- Угловой скорости колес
- Угла поворота руля
- Поперечного ускорения
- Поворота вокруг вертикальной оси (гироскоп)
Принцип работы ЭБУ при активации ESC
При выявлении несоответствия траектории алгоритм ЭБУ последовательно:
- Оценивает тип потери устойчивости (избыточная/недостаточная поворачиваемость)
- Выбирает тормозные механизмы для притормаживания конкретных колес
- Рассчитывает необходимое усилие торможения
- Координирует исполнительные устройства:
- Модуляторы давления в тормозных контурах
- Дроссельную заслонку для снижения тяги двигателя
- Систему управления двигателем (при необходимости)
| Ключевые функции ЭБУ | Технические особенности |
|---|---|
| Обработка сигналов датчиков в реальном времени | Использование fault-tolerant архитектуры |
| Алгоритмическое прогнозирование поведения авто | Дублирование критических вычислительных цепей |
| Формирование управляющих импульсов для гидравлики | Рабочая температура: -40°C до +85°C |
ЭБУ интегрирован с другими системами безопасности (ABS, EBD, TCS) через шину CAN, что позволяет комплексно управлять динамикой автомобиля. Блок постоянно проводит самодиагностику и сохраняет коды неисправностей для технического обслуживания.
Роль датчиков угла поворота рулевого колеса
Датчик угла поворота рулевого колеса (Sensor Steering Angle, SSA) является критически важным источником информации для электронного блока управления (ЭБУ) системы курсовой устойчивости (ESC). Его основная функция заключается в непрерывном и точном измерении текущего угла, на который водитель поворачивает рулевое колесо, а также скорости и направления этого поворота.
Эти данные напрямую указывают ЭБУ на желаемую траекторию движения автомобиля, которую водитель пытается задать с помощью руля. Без точной информации о положении руля система не может определить, куда именно водитель хочет направить машину, что делает невозможным корректную оценку необходимости вмешательства для сохранения устойчивости.
Функции и значение данных от датчика
- Определение намерений водителя: Угол поворота руля - основной сигнал о том, куда водитель хочет ехать (прямо, поворачивать, менять полосу).
- Расчет желаемой траектории: ЭБУ использует угол руля, скорость автомобиля и другие параметры для вычисления теоретической траектории, соответствующей маневру водителя.
- Выявление рассогласования: Сравнивая желаемую траекторию (на основе угла руля) с фактическим движением автомобиля (на основе датчиков вращения колес, поперечного ускорения и рыскания), ЭБУ определяет наличие и степень потери устойчивости (снос, занос).
- Инициация корректирующих действий: При обнаружении несоответствия между желаемым и фактическим движением, данные угла руля помогают ЭБУ выбрать оптимальную стратегию стабилизации (торможение конкретных колес, снижение крутящего момента двигателя) для возврата автомобиля на заданную водителем траекторию.
Типы датчиков и их особенности
Наиболее распространены два типа датчиков угла поворота руля:
- Оптические датчики: Используют кодирующий диск со светопроницаемыми участками и светодиод с фотоприемником. Угол определяется по количеству и характеру импульсов света.
- Магнитные датчики (на эффекте Холла или магниторезистивные): Реагируют на изменение магнитного поля при вращении магнита, связанного с рулевым валом. Измеряют абсолютное положение.
| Характеристика | Оптический Датчик | Магнитный Датчик |
|---|---|---|
| Принцип работы | Светодиод, кодирующий диск, фотоприемник | Магнит, датчик Холла/магниторезистивный элемент |
| Надежность | Чувствителен к загрязнению | Более устойчив к загрязнению |
| Измерение угла | Относительное (требует калибровки) | Абсолютное (часто не требует калибровки) |
Точность и надежность показаний датчика угла поворота руля исключительно важны. Любая ошибка, задержка или потеря сигнала от этого датчика может привести к:
- Некорректной работе ESC: Система может не сработать, когда нужно, или сработать ошибочно, дестабилизируя автомобиль.
- Ошибочному расчету траектории: ЭБУ будет сравнивать фактическое движение с неверной "желаемой" траекторией.
- Появлению сигнальной лампы ESC на приборной панели и переходу системы в аварийный режим.
После замены датчика, рулевой рейки или выполнения сход-развала обязательно требуется процедура калибровки (инициализации) датчика угла поворота руля. Эта процедура, выполняемая с помощью диагностического оборудования, устанавливает точку отсчета ("ноль") для правильного определения угла. Данные от датчика угла поворота руля эффективно используются ЭБУ ESC только в комплексе с информацией от датчиков угловой скорости колес, датчика поперечного ускорения и датчика скорости рыскания, формируя полную картину поведения автомобиля.
Назначение датчиков частоты вращения колёс
Датчики частоты вращения колёс непрерывно измеряют угловую скорость каждого колеса автомобиля. Эти данные передаются в электронный блок управления (ЭБУ) системы курсовой устойчивости для анализа текущего поведения транспортного средства.
Система ESC использует показания датчиков для сравнения фактической скорости вращения колёс с расчётными значениями. Это позволяет выявлять критические расхождения, указывающие на потерю сцепления с дорожным покрытием или начало неконтролируемого скольжения.
Функциональные задачи датчиков
- Определение проскальзывания: Фиксация разницы в скорости вращения колёс на одной оси (признак блокировки или пробуксовки).
- Расчёт скорости движения: Формирование данных о реальной скорости автомобиля путём анализа показаний с небуксующих колёс.
- Диагностика потери устойчивости: Обнаружение асимметрии в скорости вращения колёс разных сторон (индикатор заноса или сноса).
- Контроль эффективности корректировок: Обеспечение обратной связи после вмешательства ESC (например, при принудительном подтормаживании колеса).
| Параметр | Влияние на работу ESC |
|---|---|
| Разница скоростей колёс оси | Активирует антиблокировочную функцию или противобуксовочное вмешательство |
| Асимметрия вращения левых/правых колёс | Сигнализирует о заносе и включает точечное подтормаживание |
| Резкое падение скорости колеса | Указывает на блокировку при торможении на смешанном покрытии |
Значение датчика поперечного ускорения (акселерометра)
Датчик поперечного ускорения непрерывно измеряет величину боковых сил, действующих на автомобиль при поворотах, резких маневрах или движении по неровностям. Он фиксирует физическое ускорение вдоль поперечной оси (от левого к правому борту), преобразуя механическое воздействие в электрические сигналы.
Полученные данные передаются в электронный блок управления (ЭБУ) системы курсовой устойчивости для анализа реального поведения машины. Без точной информации о поперечных перегрузках система не сможет выявить расхождение между фактической траекторией движения и водительскими командами (угол поворота руля).
Ключевые функции и принцип работы
- Обнаружение заноса/сноса: При резком повороте датчик регистрирует критическое снижение поперечного ускорения, сигнализируя о потере сцепления с дорогой.
- Калибровка действий системы: На основе показаний акселерометра ЭБУ рассчитывает необходимую интенсивность подтормаживания отдельных колес и коррекции крутящего момента двигателя.
- Взаимодействие с другими сенсорами: Данные сопоставляются с информацией от датчиков угла поворота руля, частоты вращения колес и рысканья для комплексной оценки ситуации.
| Параметр | Влияние на работу системы |
|---|---|
| Диапазон измерений | Определяет максимальную перегрузку, которую может зафиксировать система (обычно ±1.5g) |
| Точность | Погрешность ≤0.01g обеспечивает своевременное срабатывание стабилизации |
| Скорость отклика | Задержка менее 10 мс критична для экстренного вмешательства |
Датчик монтируется вблизи центра масс автомобиля – под центральной консолью или сиденьем – что минимизирует погрешности от вибраций. Современные акселерометры используют пьезоэлектрические или микроэлектромеханические (MEMS) элементы, заключенные в защитный корпус. При выходе из строя датчика система курсовой устойчивости деактивируется, а на приборной панели загорается контрольная лампа ESP/ESC.
Функция датчика рыскания (угловой скорости крена)
Датчик рыскания, также известный как датчик угловой скорости крена или G-сенсор, является ключевым компонентом системы курсовой устойчивости (ESC). Его основная задача – непрерывно измерять угловую скорость вращения автомобиля вокруг вертикальной оси (ось Z) в реальном времени. Этот параметр критически важен для оценки фактического поведения машины при маневрах.
Принцип работы основан на микроэлектромеханических системах (MEMS), где инерционные силы воздействуют на микроскопические чувствительные элементы. При возникновении вращения (например, в заносе) датчик фиксирует отклонение от нормального положения и преобразует его в электрический сигнал, который передается в электронный блок управления ESC.
Роль в работе системы ESC
- Сравнение с заданными параметрами: ЭБУ сопоставляет данные датчика рыскания с информацией от датчика угла поворота руля и скорости вращения колес, определяя расхождение между намерениями водителя и реальной траекторией.
- Выявление неконтролируемого вращения: Резкое изменение угловой скорости (например, при сносе передней оси или заносе задней) интерпретируется как потеря устойчивости.
- Активация корректирующих мер: При обнаружении опасного вращения ЭБУ дает команду на притормаживание отдельных колес через гидромодулятор и/или снижение крутящего момента двигателя для восстановления стабильности.
| Параметр | Влияние на работу ESC |
|---|---|
| Точность измерений | Погрешность ≤ 0,5° обеспечивает своевременное срабатывание системы |
| Скорость отклика | Частота обновления > 100 Гц позволяет реагировать на критические ситуации за миллисекунды |
Калибровка датчика выполняется при заводской сборке и после замены компонентов подвески. Отказ устройства приводит к отключению ESC – на приборной панели загорается контрольная лампа, а система перестает компенсировать боковое скольжение.
Гидравлический модулятор: главный исполнительный механизм ESC
Гидравлический модулятор является ключевым исполнительным компонентом системы курсовой устойчивости (ESC), непосредственно отвечающим за управление тормозными усилиями на отдельных колесах. Он интегрирован в штатную тормозную систему автомобиля и представляет собой сложный блок электрогидравлических клапанов, насосов и датчиков давления.
Физически модулятор располагается рядом с главным тормозным цилиндром и соединен с ним гидравлическими магистралями. Управление осуществляется через электронный блок управления (ЭБУ) ESC, который непрерывно анализирует данные от датчиков (угла поворота руля, поперечного ускорения, скорости вращения колес и др.) и вычисляет необходимость вмешательства для сохранения траектории.
Принцип работы гидравлического модулятора
При нормальном движении гидравлический модулятор пропускает тормозную жидкость от главного цилиндра к колесным тормозным механизмам без изменений. Когда ЭБУ ESC определяет начало заноса или сноса:
- Изолирующие клапаны перекрывают прямую связь главного цилиндра с тормозом конкретного колеса.
- Перепускные клапаны открываются, направляя жидкость в резервный контур.
- Высокоскоростной насос создает дополнительное давление в контуре целевого колеса за доли секунды.
- Клапаны сброса при необходимости мгновенно снижают избыточное давление.
Данный процесс позволяет избирательно притормаживать одно или несколько колес независимо от действий водителя, генерируя корректирующий момент для стабилизации автомобиля. Циклы повышения/сброса давления могут повторяться многократно в секунду.
| Компонент модулятора | Функция |
|---|---|
| Электромагнитные изолирующие клапаны (норм. открыты) | Блокируют передачу давления от педали тормоза к колесу при активации ESC |
| Электромагнитные перепускные клапаны (норм. закрыты) | Направляют жидкость к насосу для создания независимого давления |
| Реверсивный насос с электроприводом | Форсирует давление в контуре колеса или возвращает жидкость в резервуар |
| Датчики давления | Контролируют уровень давления в каждом контуре для точного дозирования |
Современные модуляторы поддерживают многорежимную работу: помимо базовой стабилизации они обеспечивают функции электронной имитации блокировки дифференциала (EDS), адаптивного распределения тормозных усилий и поддержки работы систем автоматического торможения.
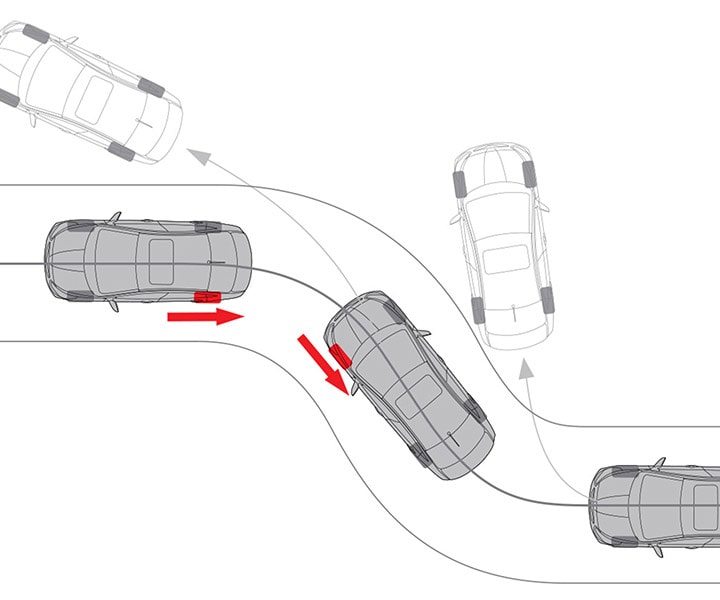
Коррекция траектории при недостаточной поворачиваемости
При недостаточной поворачиваемости автомобиль теряет сцепление передних колес с дорогой и начинает двигаться по более пологой траектории, чем задано поворотом руля. Это явление опасно сходом с дороги в наружную сторону поворота.
Система курсовой устойчивости распознает ситуацию по данным датчиков и автоматически притормаживает заднее внутреннее колесо. Дополнительно может снижаться мощность двигателя для уменьшения скорости и центробежной силы.
Механизм воздействия системы
Целевое торможение колеса: Блок управления ESP активирует тормозной механизм заднего колеса на внутренней стороне поворота. Создаваемое тормозное усилие генерирует вращательный момент, разворачивающий автомобиль в сторону поворота.
- Выявление отклонения: Датчики угловой скорости и положения руля фиксируют расхождение между фактической траекторией и заданной водителем.
- Расчет корректирующего воздействия: Микропроцессор определяет необходимое тормозное усилие для заднего внутреннего колеса на основе данных о скорости, угле поворота и боковом ускорении.
- Селективное торможение: Гидравлический модулятор создает давление в тормозной магистрали целевого колеса. Одновременно блок управления двигателем снижает крутящий момент.
- Стабилизация траектории: Комбинированное воздействие тормозного момента и снижения мощности возвращает автомобиль на заданную траекторию.
| Элемент системы | Функция при коррекции |
|---|---|
| Датчик угла поворота руля | Фиксирует намерения водителя |
| Датчик поперечного ускорения | Определяет фактическое смещение авто |
| Гидравлический модулятор | Создает давление в тормозах выбранного колеса |
| Блок управления двигателем | Снижает подачу топлива по сигналу ESP |
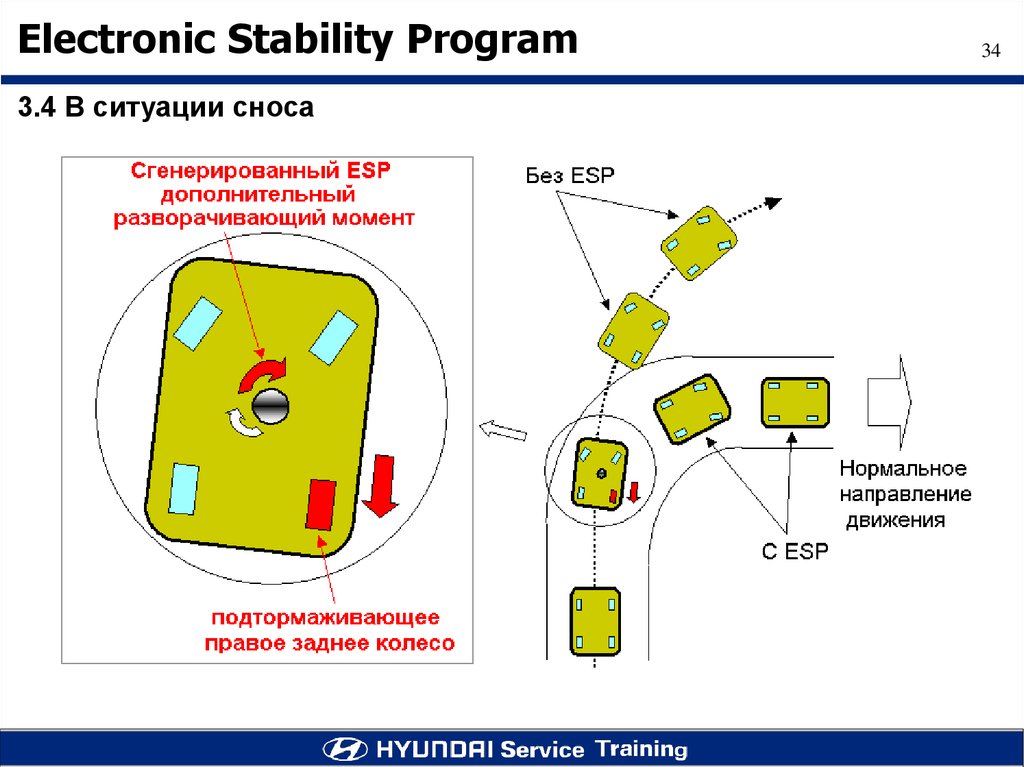
Как система корректирует путь при избыточной поворачиваемости
При избыточной поворачиваемости задние колёса теряют сцепление с дорогой, вызывая занос задней оси и вращение автомобиля вокруг вертикальной оси. Система курсовой устойчивости (ESC) мгновенно распознаёт это состояние через датчики: датчик угловой скорости рыскания фиксирует отклонение от расчётной траектории, а датчики скорости вращения колёс и угла поворота руля подтверждают несоответствие между заданным направлением и фактическим движением.
ESC вычисляет необходимую корректирующую силу для компенсации вращения и восстановления курса. Основная задача – создать стабилизирующий момент, противодействующий заносу задней части и возвращающий автомобиль на траекторию, заданную водителем через рулевое колесо.
Алгоритм действий системы
- Принудительное торможение внешнего переднего колеса: ESC активирует тормозной механизм переднего колеса, находящегося снаружи поворота. Это создаёт противодействующую силу, которая "вытягивает" переднюю часть автомобиля наружу поворота и останавливает вращение.
- Снижение крутящего момента двигателя: Блок управления ESC передаёт сигнал системе управления двигателем для мгновенного уменьшения мощности. Это сокращает нагрузку на ведущие колёса, предотвращая их пробуксовку и помогая восстановить сцепление задней оси.
Алгоритм стабилизации при заносе задней оси автомобиля
При обнаружении заноса задней оси (избыточной поворачиваемости) система курсовой устойчивости мгновенно активирует тормозные механизмы отдельных колёс и корректирует мощность двигателя для восстановления траектории движения. Датчики (угла поворота руля, поперечного ускорения, скорости вращения колёс, рысканья) непрерывно сравнивают фактическое поведение автомобиля с расчётной моделью, определяя начало потери устойчивости.
Электронный блок управления (ЭБУ) вычисляет необходимые корректирующие воздействия на основе разницы между заданной водителем и реальной траекторией. Алгоритм стабилизации фокусируется на создании стабилизирующего момента, противодействующего вращению автомобиля вокруг вертикальной оси.
Последовательность действий системы:
- Идентификация заноса: Датчик рысканья фиксирует начало вращения задней части автомобиля в сторону, противоположную повороту руля.
- Притормаживание переднего колеса: ЭБУ подаёт команду на кратковременное торможение переднего колеса, внешнего по отношению к повороту (например, левого колеса в правом повороте). Это создаёт момент, "вытягивающий" передок в направлении заноса.
- Коррекция тяги: Одновременно снижается крутящий момент двигателя (через дроссельную заслонку или систему впрыска) для уменьшения центробежной силы, усугубляющей занос.
- Мониторинг и адаптация: Система непрерывно анализирует изменение параметров (угол рысканья, боковое ускорение). Если занос продолжается, модуляция тормозов и мощности двигателя повторяется циклически с разной интенсивностью.
- Завершение стабилизации: Как только траектория движения совпадает с заданной водителем, а угловые скорости стабилизируются, система плавно прекращает вмешательство.
| Элемент системы | Функция в алгоритме |
|---|---|
| Датчик рысканья | Определяет скорость вращения авто вокруг вертикальной оси |
| Датчик угла поворота руля | Фиксирует заданную водителем траекторию |
| Гидравлический блок | Создает давление в тормозной магистрали выбранного колеса |
| ЭБУ двигателя | Снижает крутящий момент по команде ЭБУ ESP |
Важно: Водитель должен продолжать рулением корректировать траекторию – система не заменяет действия человека, а лишь ассистирует при потере устойчивости. Удержание педали газа или резкий сброс тяги во время работы ESP могут снизить её эффективность.
Активация растормаживания колёс при срабатывании системы
При обнаружении потери устойчивости (заноса, сноса) электронный блок управления (ЭБУ) системы курсовой устойчивости мгновенно вычисляет необходимые корректирующие воздействия. Одним из ключевых методов стабилизации траектории является избирательное растормаживание колёс. ЭБУ подаёт команду на модуляторы гидравлического блока ABS, временно снижая давление в тормозной магистрали конкретного колеса, которое требуется разблокировать для восстановления управляемости.
Растормаживание выполняется дифференцированно – система выбирает строго определённое колесо (или колёса) на основе анализа данных датчиков: угла поворота руля, поперечного ускорения, скорости вращения каждого колеса и рысканья (yaw rate). Например, при избыточной поворачиваемости (заносе задней оси) система может притормаживать наружное переднее колесо, а для компенсации избыточного тормозящего эффекта – частично отпустить внутреннее заднее колесо.
Принципы работы алгоритма растормаживания
- Селективный выбор колеса: Система определяет, какое именно колесо необходимо разблокировать для создания корректирующего момента (например, заднее внутреннее в повороте при сносе передней оси).
- Дозированное снижение давления: Гидравлический блок ABS не просто полностью отпускает тормоз, а точно регулирует давление в контуре выбранного колеса через высокоскоростные электромагнитные клапаны.
- Синхронизация с подтормаживанием: Растормаживание одного колеса всегда сочетается с притормаживанием других колёс для формирования вращающего момента, возвращающего автомобиль на заданную траекторию.
- Минимизация потерь в динамике: Процесс занимает доли секунды и повторяется циклически (до 15 раз в секунду) до полной стабилизации авто.
| Ситуация | Цель растормаживания | Типичное действие системы |
|---|---|---|
| Снос передней оси (недостаточная поворачиваемость) | Увеличить поворачиваемость | Растормаживание внутреннего заднего колеса + подтормаживание внешнего заднего колеса |
| Занос задней оси (избыточная поворачиваемость) | Уменьшить поворачиваемость | Растормаживание внутреннего переднего колеса + подтормаживание внешнего переднего колеса |
Эффективность растормаживания напрямую зависит от быстродействия гидравлики и точности прогноза ЭБУ. Современные системы способны обрабатывать данные и менять давление в тормозных контурах за время менее 100 миллисекунд, что существенно превышает скорость реакции водителя. Это позволяет сохранить контроль над автомобилем даже в критических ситуациях на скользком покрытии или при резком манёвре.
Роль управления подачей топлива в работе системы устойчивости
Управление подачей топлива является критическим компонентом системы курсовой устойчивости (ESC) для оперативного изменения динамики автомобиля. При обнаружении несоответствия между заданной и фактической траекторией (например, при заносе или сносе), ESC через блок управления двигателем (ECU) принудительно снижает или временно прекращает подачу топлива. Это мгновенно уменьшает крутящий момент на ведущих колесах, предотвращая их пробуксовку и сокращая центробежные силы, destabilizing автомобиль.
Сокращение мощности двигателя работает синергетически с избирательным подтормаживанием колес. Например, при избыточной поворачиваемости (заносе задней оси) снижение тяги уменьшает инерционное вращение кузова, а при недостаточной поворачиваемости (сносе передней оси) – перераспределяет нагрузку на передние колеса, улучшая их сцепление. Без этого механизма тормозные импульсы ESC могли бы перегружать трансмиссию и шины, снижая эффективность стабилизации.
Механизмы интеграции и воздействия
- Аппаратная синхронизация: ESC взаимодействует с ECU через CAN-шину, отправляя сигналы на коррекцию угла открытия дроссельной заслонки или пропуск впрыска топлива в цилиндрах.
- Адаптивное дросселирование: Система рассчитывает оптимальное снижение мощности (до 50%) на основе данных о скорости, угле поворота руля, боковом ускорении и проскальзывании колес.
- Профилактика перегрузок: Уменьшение крутящего момента снижает риски срабатывания ABS при экстренном торможении и износа элементов тормозной системы.
| Ситуация | Действие ESC | Роль управления топливом |
|---|---|---|
| Резкий поворот на скользкой дороге | Компенсация заноса | Снижение мощности для уменьшения центробежной силы и стабилизации траектории |
| Уход в аквапланирование | Восстановление контакта шин с дорогой | Кратковременное прекращение подачи топлива для разгрузки ведущих колес |
| Подъем на скользкий уклон | Подавление пробуксовки | Ограничение крутящего момента для предотвращения срыва колес в скольжение |
Кнопка отключения ESC/VSC: функциональность и ограничения
Кнопка отключения ESC/VSC позволяет водителю временно деактивировать систему курсовой устойчивости при возникновении специфических условий движения. Эта функция может потребоваться для преодоления глубокого снега, грязи или сыпучего грунта, где пробуксовка колес необходима для продвижения автомобиля.
При кратковременном нажатии кнопки система переходит в режим пониженного вмешательства, сохраняя базовые функции антиблокировки тормозов (ABS) и антипробуксовки (TCS). Длительное удержание кнопки (3-5 секунд) в большинстве моделей полностью отключает ESC/VSC, о чем сигнализирует контрольная лампа на приборной панели.
Ключевые особенности работы
Функциональность при отключении:
- Система автоматически реактивируется при превышении пороговой скорости (обычно 50-60 км/ч)
- Перезапускается при каждом новом включении зажигания, независимо от предыдущего состояния
- Сохраняет работоспособность ABS и EBD (электронного распределения тормозных усилий)
Критические ограничения:
- Принудительная активация ESC/VSC в ситуациях с риском опрокидывания (даже при отключении)
- Невозможность полного отключения на автомобилях с интегрированными системами рулевого управления
- Отсутствие реакции на кнопку при неисправностях CAN-шины или датчиков вращения колес
Важно: Производители ограничивают функционал кнопки из-за требований безопасности. Тесты показывают, что отключение ESC/VSC увеличивает риск аварии на скользком покрытии на 35-40%. Система сохраняет возможность экстренного вмешательства при:
- Обнаружении заноса с углом более 10-15 градусов
- Резком повороте руля на высокой скорости
- Критическом крене кузова
| Состояние системы | Контрольная лампа | Условия автоматического включения |
|---|---|---|
| Частичное отключение | Мигает | Любое резкое маневрирование |
| Полное отключение | Горит постоянно | Скорость >60 км/ч или перезапуск двигателя |
Обязательные условия заводской установки системы на современных авто
Для интегрированной работы ESP современный автомобиль должен обладать базовыми электронно-управляемыми системами, включая электронный контроль тяги (ASR) и антиблокировочную тормозную систему (ABS). Без этих компонентов полноценное функционирование курсовой устойчивости невозможно, так как они обеспечивают управление тормозными усилиями и пробуксовкой колес.
Обязательным требованием является наличие сети датчиков, передающих данные в реальном времени: датчики частоты вращения колес, угла поворота руля, поперечного ускорения и рысканья (гироскоп). Все сигналы обрабатываются единым блоком управления, синхронизированным с системами двигателя и трансмиссии через CAN-шину.
Ключевые технические требования
- Гидравлический блок с активным усилителем: Способен независимо регулировать давление в тормозных контурах каждого колеса без нажатия педали.
- Электронная дроссельная заслонка: Для мгновенного управления мощностью двигателя по команде ESP.
- Скоростные CAN-интерфейсы: Обеспечивают обмен данными между ЭБУ двигателя, АКПП, ABS и ESP со скоростью ≥ 500 кбит/с.
- Программная калибровка под платформу: Индивидуальные настройки для шасси, центра тяжести и распределения масс конкретной модели.
| Компонент | Минимальные требования |
|---|---|
| Датчик рысканья | Точность ≥ 0.1°/с, диапазон ±75°/с |
| Частота опроса датчиков | ≥ 100 Гц |
| Время реакции ЭБУ | ≤ 20 мс |
| Давление в гидроблоке | ≥ 180 бар |
Этапы диагностики перед установкой системы курсовой устойчивости
Перед монтажом системы курсовой устойчивости (ESC/ESP) обязательна всесторонняя диагностика транспортного средства. Эта процедура направлена на выявление существующих неисправностей, оценку совместимости компонентов и готовности автомобиля к интеграции новой системы. Без тщательной проверки установка ESC может быть неэффективной или невозможной.
Диагностика охватывает несколько ключевых систем автомобиля, которые будут взаимодействовать с ESC. Основное внимание уделяется электронным блокам управления, датчикам, тормозной системе и электрическим цепям. Пропуск или некачественное выполнение любого этапа диагностики грозит некорректной работой ESP после установки или полным отказом системы.
Ключевые диагностические процедуры
Обязательными этапами предустановочной диагностики являются:
- Сканирование электронных систем:
- Подключение диагностического сканера к порту OBD-II для считывания кодов неисправностей (DTC) из всех модулей (ECU), особенно ABS, двигателя, коробки передач.
- Анализ текущих параметров работы двигателя, тормозов, рулевого управления.
- Проверка совместимости имеющихся ЭБУ с устанавливаемым модулем ESC/ESP и их способности обмениваться данными по шине CAN.
- Оценка состояния тормозной системы:
- Тщательная проверка гидравлического контура тормозов на герметичность (отсутствие утечек тормозной жидкости).
- Диагностика работы насоса ABS и модулятора (если ABS уже установлена), проверка давления в системе.
- Контроль износа и состояния тормозных дисков, колодок, суппортов, шлангов и магистралей.
- Проверка датчиков и сенсоров:
ESC критично зависит от точных данных множества датчиков. Проверяются:
- Датчики скорости вращения колес: целостность, чистота, корректность сигнала, состояние проводки и разъемов.
- Датчик угла поворота рулевого колеса: калибровка, отсутствие ошибок, плавность изменения сигнала.
- Датчик поперечного ускорения и рысканья (Gyro Sensor): место предполагаемой установки (должно соответствовать спецификациям), проверка на наличие аналогичных существующих датчиков.
- Датчики продольного ускорения (при необходимости).
- Анализ электрической системы и проводки:
- Замер напряжения аккумуляторной батареи и проверка работы генератора под нагрузкой.
- Оценка состояния массы (кузов, двигатель).
- Проверка наличия свободных цепей в жгутах проводки для подключения нового модуля ESC и его датчиков.
- Оценка целостности и качества существующей проводки к связанным системам (ABS, рулевое управление).
Результаты диагностики определяют необходимость предварительного ремонта (например, замены датчиков, устранения утечек в тормозах, ремонта проводки) или подтверждают готовность автомобиля к безопасной и корректной установке системы курсовой устойчивости.
Монтаж датчиков колес и рулевого управления
Установка датчиков угловой скорости колес требует демонтажа ступиц или тормозных дисков для интеграции элементов в конструкцию. Каждый сенсор фиксируется крепежными болтами с четко регламентированным моментом затяжки, исключающим вибрационное смещение. Электропроводка укладывается вдоль рычагов подвески с обязательной защитой гофротрубками от влаги, грязи и механических повреждений, после чего подключается к блоку управления через стандартизированные разъемы.
Монтаж датчика угла поворота рулевого колеса осуществляется внутри рулевой колонки за переключателями подрулевых лепестков. Корпус устройства крепится к кронштейну колонки, а роторный элемент синхронизируется с рулевым валом посредством шлицевого соединения. При калибровке выполняется программная привязка нейтрального положения при прямолинейном движении автомобиля с точностью до ±1.5°.
Ключевые этапы подключения и проверки
- Тестирование сопротивления изоляции проводки датчиков колес мегаомметром при 500 В
- Программная адаптация новых сенсоров через диагностический разъем OBD-II
- Контроль воздушных зазоров между импульсным кольцом и датчиком (0.3-1.1 мм)
| Компонент | Тип крепления | Калибровочные параметры |
|---|---|---|
| Датчик колеса | Фланцевое (M8×1.25) | Зазор ±0.2 мм, момент 8-10 Н·м |
| Датчик рулевого вала | Хомут-стяжка | Центровка шлицов, допуск 0.5° |
Важно: После замены любых компонентов подвески или рулевого механизма требуется повторная инициализация системы ESP через сервисное оборудование. Несоблюдение процедуры калибровки вызывает ложные срабатывания стабилизации и ошибки в журнале ECU.
Установка акселерометра и датчика рыскания: требования к месту
Акселерометр и датчик рыскания монтируются в зоне центра тяжести транспортного средства для точного измерения продольных/поперечных ускорений и угловой скорости. Крепление осуществляется непосредственно к несущим элементам кузова или подрамнику через жесткие кронштейны, исключающие вибрации и люфты. Обязательна защита от прямого воздействия влаги, грязи и электромагнитных помех.
Отклонение от требуемого местоположения даже на 2-5 см или неточная ориентация датчиков вызывают некорректный расчет угла крена и скорости рыскания. Это провоцирует ложные срабатывания или запоздалое вмешательство системы ESP, повышая риски потери управляемости при экстренных маневрах.
Ключевые требования к размещению
| Акселерометр | Датчик рыскания |
|---|---|
|
|
Общие запреты:
- Монтаж на деформируемых или упругих элементах (пластиковые панели, гибкие перегородки)
- Размещение вблизи высоковольтных проводов (>50 см от катушек зажигания, генератора)
- Установка на поверхностях с температурой выше 85°C (возле выхлопной системы)
Особенности прокладки жгутов проводов для всех сенсоров
Прокладка жгутов проводов для датчиков системы курсовой устойчивости (ESC) требует строгого соблюдения норм, так как малейшие помехи или повреждения кабелей приводят к искажению критически важных данных. Ошибки при монтаже провоцируют ложные срабатывания системы, задержки реакции или полный отказ ESC, напрямую влияя на безопасность движения.
Жгуты должны обеспечивать бесперебойную передачу сигналов от всех сенсоров (угла поворота руля, скорости вращения колес, поперечного ускорения, рысканья, давления в тормозной системе) к электронному блоку управления. Это требует комплексной защиты от внешних воздействий и грамотной трассировки, исключающей пересечения с силовыми цепями и подвижными элементами.
Ключевые требования к монтажу проводки
- Экранирование: Обязательное применение экранированных кабелей для датчиков скорости колес и гироскопа. Экран надежно заземляется с одной стороны для подавления электромагнитных помех от генератора, катушек зажигания.
- Механическая защита: Прокладка в гофротрубах в зонах риска (подкрылки, около рулевой рейки, под днищем). Жесткая фиксация нейлоновыми хомутами через 25-30 см без перетяжки. Исключение контакта с острыми кромками кузова.
- Влагозащита: Герметизация разъемов термоусадочными трубками с клеевым слоем. Дополнительная гидроизоляция мест ввода проводов в салон для датчиков ABS/ESC в колесных арках.
- Температурная устойчивость: Использование проводов с изоляцией, рассчитанной на диапазон -40°C до +125°C (особенно для жгутов возле тормозных суппортов и двигателя).
- Трассировка: Минимизация длины жгутов. Раздельная прокладка с силовой проводкой (зазор не менее 15 см). Фиксация к неподвижным элементам кузова без натяга, с запасом на вибрацию.
- Маркировка: Четкая идентификация всех разъемов и проводов согласно схеме подключения. Применение бирок или цветовой кодировки для упрощения диагностики.
Процедура подключения гидравлического модулятора в тормозную систему
Гидравлический модулятор интегрируется между главным тормозным цилиндром и колесными тормозными механизмами, становясь центральным звеном управления давлением в контурах. Его монтаж требует строгого соблюдения схемы производителя, так как ошибки приведут к некорректной работе системы курсовой устойчивости или отказу тормозов.
Перед установкой необходимо убедиться в совместимости модулятора с моделью автомобиля и проверить целостность всех компонентов. Обязательно отсоединяется аккумуляторная батарея для предотвращения короткого замыкания и случайной активации системы во время работ.
Последовательность подключения

Основные этапы установки включают:
- Механический монтаж
Крепление корпуса модулятора на штатное место (обычно в моторном отсеке) с помощью предусмотренных кронштейнов. Затяжка болтов осуществляется с моментом, указанным в технической документации. - Гидравлическое соединение
- Подключение входных магистралей от главного тормозного цилиндра к соответствующим портам модулятора.
- Соединение выходных магистралей модулятора с тормозными трубопроводами, идущими к суппортам/колесным цилиндрам.
- Электрическое подключение
Установка разъема блока управления ESP на корпус модулятора. Фиксация коннектора должна сопровождаться характерным щелчком для предотвращения разъединения. - Прокачка тормозной системы
Последовательное удаление воздуха из всех контуров с помощью диагностического оборудования, активирующего клапаны модулятора. Традиционный метод прокачки педалью здесь неэффективен.
| Этап | Критические параметры |
|---|---|
| Затяжка соединений | Момент 15-25 Н·м (точное значение уточнять в мануале) |
| Прокачка | Обязательное использование сканера для управления соленоидами модулятора |
Финишные проверки включают тестовый запуск двигателя, мониторинг кодов ошибок через диагностический разъем и контроль герметичности соединений под давлением. Система готова к эксплуатации только после успешного выполнения калибровочных процедур ESP через сервисное ПО.
Программирование ЭБУ ESC после аппаратной установки компонентов
После физического монтажа датчиков, гидроблока, модуля ЭБУ ESC и сопутствующей проводки, критически важно выполнить программную настройку системы. Без корректного программирования ЭБУ не сможет правильно интерпретировать сигналы датчиков и управлять исполнительными механизмами, что сделает систему неработоспособной или даже опасной.
Процесс программирования начинается с подключения диагностического сканера к OBD-II порту автомобиля и запуска специализированного ПО производителя (например, VCDS для VAG, Delphi DS, Bosch ESI). Сканер идентифицирует установленный ЭБУ ESC и проверяет наличие обновлений прошивки, соответствующих конкретной модели ТС и установленному оборудованию.
Ключевые этапы программирования
Калибровка датчиков:
- Обнуление показаний датчиков угла поворота руля и поперечного ускорения на ровной поверхности.
- Калибровка датчика давления в тормозной системе (требует цикла включения/выключения зажигания).
- Адаптация датчика продольного ускорения (иногда требует пробной поездки).
Привязка к CAN-шине:
- Регистрация ЭБУ ESC в сетевой архитектуре автомобиля.
- Настройка обмена данными с ЭБУ двигателя, АБС и коробки передач.
- Программирование параметров VIN, кодов доступа и ключей безопасности.
Активация функций:
| Функция | Параметр настройки |
|---|---|
| Hill Descent Control | Калибровка под уклон |
| Trailer Sway Mitigation | Активация через меню буксировки |
| Roll Stability Control | Настройка порогов срабатывания |
Тестовые процедуры:
- Аппаратный тест насоса и клапанов гидроблока.
- Проверка кодов ошибок во всех связанных системах.
- Валидация работы через пробную поездку с генерацией заноса на закрытой площадке.
Финишным этапом является запись конфигурации в энергонезависимую память ЭБУ и защита блока от несанкционированного доступа. Несоблюдение последовательности или использование неофициального ПО может привести к некорректной работе ESC и аннулированию гарантии.
Этапы калибровки всех датчиков системы
Калибровка датчиков системы курсовой устойчивости требует строгого соблюдения регламента производителя. Процедура выполняется на специализированном оборудовании после замены компонентов, ремонта ходовой части или сбоев в работе ЭБУ.
Автомобиль должен находиться на идеально ровной поверхности с нормализованным давлением в шинах. Обязательно отключаются все посторонние электронные устройства, а АКБ подключается к стабилизатору напряжения для предотвращения сбоев питания.
Последовательность калибровочных операций
- Инициализация диагностического режима: подключение сканера к OBD-II порту, активация сервисного меню электронного блока управления (ЭБУ) ESP.
- Калибровка датчика угла поворота руля:
- Установка колес строго прямо
- Фиксация нулевого положения при повороте руля до упора влево/вправо
- Настройка акселерометров и гироскопов:
- Запись показаний продольного/поперечного ускорения при неподвижном авто
- Коррекция нулевых значений угловой скорости рыскания
- Верификация датчиков колес:
- Сравнение скорости вращения всех колес на прямой
- Проверка корреляции данных с ABS
- Тест-драйв для динамической калибровки:
- Движение со скоростью 40-60 км/ч по прямой
- Плавные повороты без ускорения для синхронизации данных
- Финализация и сохранение параметров: запись калибровочных коэффициентов в память ЭБУ, проверка кодов ошибок.
| Датчик | Инструмент контроля | Допустимая погрешность |
|---|---|---|
| Угла поворота руля | Сканер с графиком угла | ±1.5° |
| Поперечного ускорения | Мобильный стенд ESP | ±0.03 g |
| Скорости рыскания | Эталонный гироскоп | ±0.5°/с |
После калибровки выполняется обязательная проверка индикации ESP на приборной панели и тестирование системы на скользком покрытии. Повторная калибровка требуется при изменении развала-схождения или установке колес другого диаметра.
Проведение тест-драйва для проверки эффективности срабатывания ESC
Проверка работоспособности системы курсовой устойчивости (ESC) требует создания контролируемых критических ситуаций на безопасной закрытой площадке. Тест-драйв фокусируется на двух ключевых сценариях: избыточная поворачиваемость (занос задней оси) и недостаточная поворачиваемость (снос передней оси).
Для объективной оценки необходимо обеспечить идентичные условия: сухое ровное покрытие (асфальт/бетон), отсутствие ветра, одинаковую скорость входа в маневр и температуру шин. Тесты проводятся на скорости 50-80 км/ч, имитируя резкое изменение траектории или экстренное объездное маневрирование.
Методика проведения тестов и оценка результатов
Основные проверяемые параметры:
- Стабильность траектории: удержание автомобиля в пределах заданной полосы при выполнении "лосиного теста" или резких поворотов.
- Скорость реакции: время между началом потери устойчивости и активацией тормозных механизмов (характерный звук работы насоса и легкие толчки педали тормоза).
- Плавность восстановления: отсутствие резких рывков или повторных срывов оси после вмешательства системы.
Сравнительная таблица признаков корректной работы ESC:
| Ситуация | Признаки эффективного срабатывания ESC |
|---|---|
| Избыточная поворачиваемость (занос) | Автоматическое подтормаживание внешнего переднего колеса, возврат задней оси в линию поворота без ручной корректировки |
| Недостаточная поворачиваемость (снос) | Подтормаживание внутреннего заднего колеса, восстановление поворачиваемости без выезда за пределы виртуальной траектории |
При отключенной ESC (через кнопку на панели) в аналогичных условиях автомобиль демонстрирует выраженное вращение или полную потерю управляемости. Фиксация результатов проводится через:
- Визуальное наблюдение траектории (конусы/разметка)
- Данные бортовых датчиков (при наличии диагностического оборудования)
- Субъективную оценку водителя по шкале стабильности (1-5 баллов)
Важно: все маневры выполняются только профессионалами с использованием средств пассивной безопасности (шлем, ремни).
Ошибки после установки: типовые проблемы и их устранение
После установки или перепрошивки системы курсовой устойчивости (ESC/ESP) могут возникать ошибки, вызванные некорректными настройками, сбоями в процессе программирования или механическими неполадками. Часто они проявляются в виде загоревшейся контрольной лампы ESC на приборной панели, некорректной работы системы (например, несвоевременное срабатывание или полное отключение) или появления диагностических кодов неисправностей (DTC) в памяти блока управления.
Основные причины включают неверную калибровку датчиков, неправильное подключение разъемов, низкий заряд АКБ во время программирования, физические повреждения компонентов или несовместимость программного обеспечения. Важно провести комплексную диагностику с помощью сканера, способного считывать коды ESC и данные с датчиков в реальном времени.
Распространенные неисправности и методы их решения
Типовые проблемы после установки/обслуживания ESC и способы их устранения:
- Ошибки датчика угла поворота руля (SAS):
- Симптомы: ESC не активируется, машину "ведет" в сторону.
- Решение: Обязательная калибровка (инициализация) датчика после любых работ с рулевой рейкой или подвеской. Процедура выполняется сканером или специфичной последовательностью действий (зависит от марки авто).
- Ошибки датчиков колес:
- Симптомы: Ложные срабатывания ABS/ESC, потеря связи с блоком.
- Решение: Проверить целостность проводки, чистоту и зазор датчиков, исправность зубчатых колес (рингеров). Заменить поврежденные датчики.
- Сбои в гидроблоке:
- Симптомы: Горит лампа ESC/ABS, система не функционирует.
- Решение: Проверить подключение разъемов гидромодуля, целостность предохранителей и реле. Прокачать тормозную систему. При ошибках внутренних клапанов – замена/ремонт блока.
- Проблемы с коммуникацией (CAN-шина):
- Симптомы: Множественные ошибки в разных системах, ESC недоступна.
- Решение: Проверить качество подключения диагностического разъема OBD-II, целостность проводки CAN-шины к блоку ESC, напряжение в бортовой сети.
- Некорректное программирование:
- Симптомы: ESC работает хаотично или отключена, ошибки типа "Invalid Configuration".
- Решение: Перепрошить блок ESC корректным и совместимым ПО, провести базовые установки (adaption) через дилерский/профессиональный сканер.
Важно! После устранения неисправности и очистки ошибок необходимо провести тест-драйв для проверки работоспособности ESC в разных режимах (разгон, торможение, повороты). При отсутствии специализированного оборудования диагностику и ремонт следует доверить специализированным сервисам.
Список источников
При подготовке материалов о системе курсовой устойчивости использовались проверенные технические документы и отраслевые публикации. Указанные источники обеспечивают достоверность информации об устройстве, монтаже и принципах работы электронного помощника.
Актуальные данные основаны на современных стандартах безопасности и рекомендациях ведущих автопроизводителей. Следующий перечень включает ключевые материалы для углубленного изучения темы.
- ГОСТ Р 41.13-H (Правила ЕЭК ООН № 13) – Тормозные системы легковых автомобилей
- Техническая документация Bosch: "Системы динамической стабилизации ESP"
- Учебное пособие "Электронные системы безопасности автомобиля" (Московский политех)
- SAE Technical Paper 2001-01-0871: "Алгоритмы работы ESC в критических ситуациях"
- Официальные руководства по эксплуатации Volkswagen, Toyota, BMW (разделы активной безопасности)
- Монография "Автомобильная мехатроника" (под ред. Иванова А.С.) – Глава 4: Системы стабилизации
- Журнал "Автотранспорт" №3/2022: "Эволюция систем курсовой устойчивости: от ABS до eESC"
- Протоколы испытаний Euro NCAP: Методики оценки эффективности ESC
- Сборник трудов НАМИ: "Особенности адаптации ESC для внедорожников"
- Инженерные стандарты ISO 26262: Функциональная безопасность электронных систем