Устройство датчика поворота руля
Статья обновлена: 28.02.2026
Датчик угла поворота рулевого колеса является критически важным компонентом современных электронных систем управления автомобилем.
Это устройство непрерывно отслеживает положение руля, передавая точные данные о скорости и угле его поворота бортовым компьютерам.
Информация с датчика напрямую влияет на работу систем курсовой устойчивости, электрического усилителя руля и адаптивного освещения.
Принцип действия основан на преобразовании механического вращения рулевой колонки в электрические сигналы.
Оптические или магнитные элементы считывания

В датчиках угла поворота руля для преобразования механического движения в электрический сигнал применяются две основные технологии считывания: оптическая и магнитная. Обе системы фиксируют перемещение элементов, связанных с валом рулевого колеса, но используют принципиально разные физические явления для детектирования положения.
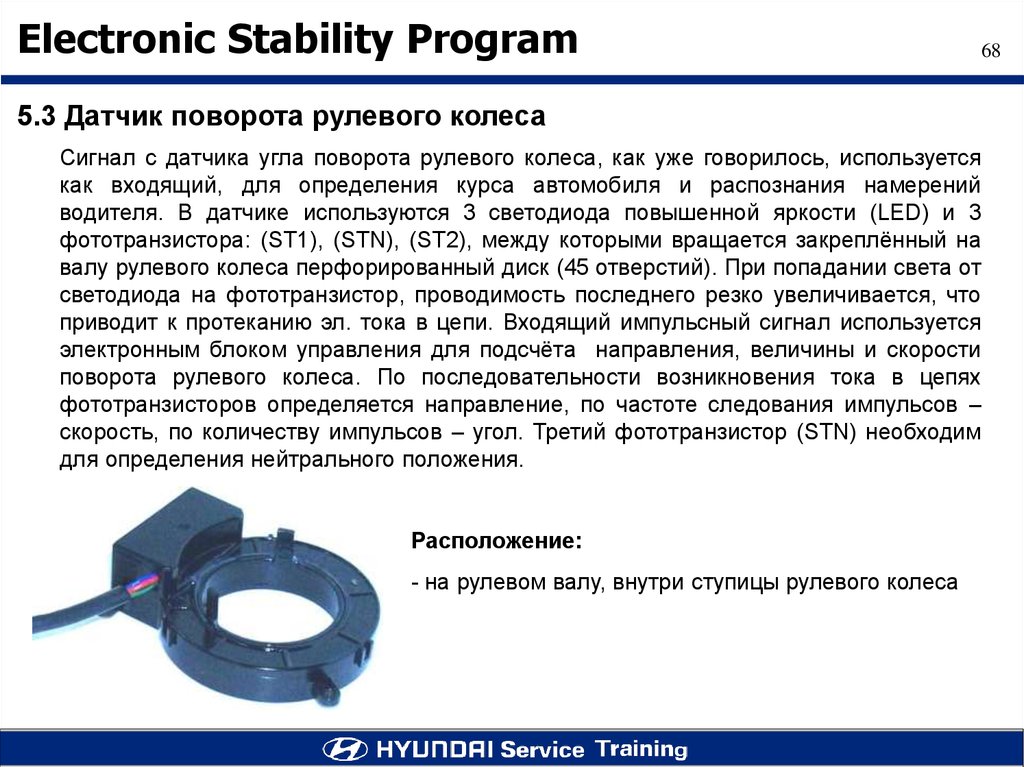
Оптические датчики работают на основе прерывания светового потока или анализа изменения его интенсивности. В их конструкции присутствуют светодиод (источник излучения), вращающийся диск с прорезями или отражающими секторами (кодирующий элемент) и фотоприёмник (фотодиод или фототранзистор). При повороте руля диск модулирует световой поток, создавая импульсный сигнал, который преобразуется в цифровой код угла.
Ключевые особенности технологий
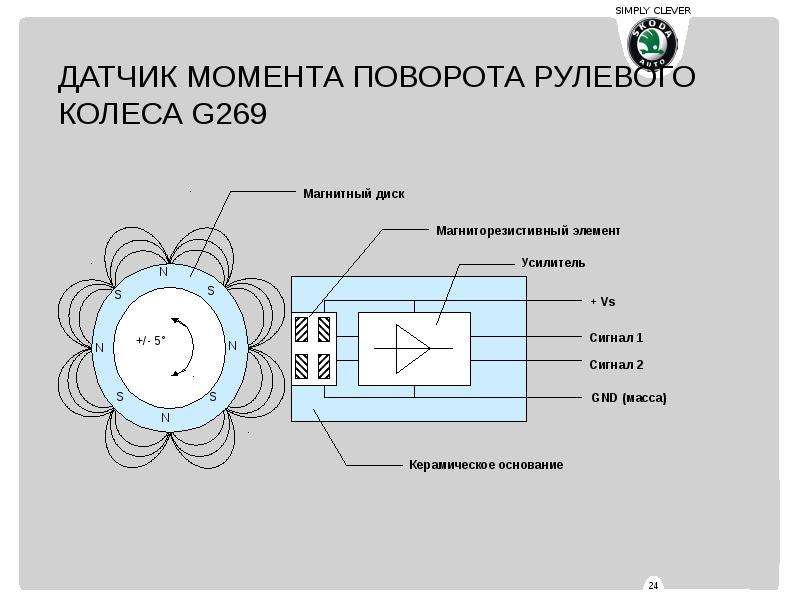
Магнитные датчики используют эффект Холла или магниторезистивные элементы. На валу закрепляется постоянный магнит, а напротив него размещается чувствительный сенсорный чип. При вращении вала изменение магнитного поля регистрируется сенсором:
- Датчики Холла: генерируют напряжение, пропорциональное силе и направлению поля.
- Магниторезистивные элементы (AMR/GMR): меняют сопротивление под воздействием поля.
Сравнительные характеристики:
| Параметр | Оптические датчики | Магнитные датчики |
|---|---|---|
| Чувствительность к загрязнениям | Высокая (требует герметичности) | Низкая |
| Износостойкость | Ограничена (механические компоненты) | Высокая (бесконтактный принцип) |
| Точность | Очень высокая | Высокая |
| Стоимость | Выше | Ниже |
В современных автомобилях магнитные решения доминируют благодаря устойчивости к пыли, влаге и вибрациям. Оптические системы встречаются реже из-за необходимости сложной герметизации, но сохраняют применение в прецизионных задачах, где критична абсолютная точность позиционирования.
Конструкция диска с метками или полюсами
Диск с метками или полюсами представляет собой круглый элемент, жёстко закреплённый на валу рулевой колонки. Его основная функция – изменение физических параметров (магнитного поля или светового потока) при вращении, что фиксируется считывающими элементами датчика. Геометрия и расположение меток строго рассчитаны для обеспечения точного определения угла и направления поворота руля.
Конструктивно диск изготавливается из немагнитного материала (пластик, алюминий) для магнитных систем или непрозрачного материала (металл, композит) для оптических. На его периферии равномерно нанесены идентичные метки: магнитные полюса (северный/южный) или физические прорези/отражающие сектора. Количество меток определяет разрешающую способность датчика – чем их больше, тем выше точность измерения.
Ключевые особенности конструкции
- Магнитные диски: Используют многополюсные кольца из магнитотвердого материала (например, феррит), намагниченные с чередованием полюсов. Полюса формируют зоны с переменным магнитным потоком.
- Оптические диски: Содержат радиальный узор из:
- Прозрачных щелей/отверстий в непрозрачной основе,
- Или отражающих/не отражающих секторов (технология "encoder disc").
- Двухдорожечные диски: Часто включают две концентрические дорожки меток со смещением. Это позволяет определять направление вращения по фазовому сдвигу сигналов.
| Тип диска | Материал | Характеристики меток | Тип сенсора |
|---|---|---|---|
| Магнитный | Пластик с магнитным наполнителем, феррит | Чередующиеся полюса N-S, 32-128 пар | Датчик Холла, магниторезистивный |
| Оптический | Непрозрачный пластик, металл | Щели/отражатели, 100-500 шт. | Фототранзистор, инфракрасный сенсор |
Диски защищены от смещения и вибраций прецизионной посадкой на вал. Для компенсации люфтов применяются шлицевые соединения или стопорные кольца. В оптических системах обязательна герметизация от пыли и влаги, магнитные менее чувствительны к загрязнениям.
Фиксация абсолютного или относительного угла
Датчики угла поворота рулевого колеса используют две основные методологии измерения: абсолютную и относительную. Абсолютные датчики определяют точное угловое положение руля в любой момент времени без привязки к предыдущим показаниям, используя уникальные коды для каждой позиции в пределах полного оборота (0°–360°). Относительные (инкрементальные) датчики фиксируют изменение угла относительно начальной точки, суммируя приращения при повороте.
Ключевое отличие заключается в работе при потере питания: абсолютные датчики сохраняют информацию о текущем положении руля после повторного включения, тогда как относительным требуется калибровка (например, поворот руля до упора влево/вправо для определения "нуля"). Для охвата углов свыше 360° (многократные обороты руля) абсолютные датчики дополняются счетчиками оборотов, а относительные – интегрируют данные с инкрементальных энкодеров.
Критерии выбора типа измерения
Системы автомобиля предъявляют разные требования к точности и надежности:
- ABS/ESP требуют абсолютного угла для мгновенного определения позиции руля при экстренном торможении.
- Электроусилитель руля (ЭУР) использует относительные датчики с периодической калибровкой для расчета усилия.
- Системы автономного вождения полагаются на гибридные решения с дублированием данных для резервирования.
| Тип датчика | Преимущества | Недостатки |
|---|---|---|
| Абсолютный | Мгновенная готовность после включения, высокая отказоустойчивость | Сложная конструкция, высокая стоимость |
| Относительный | Простота изготовления, низкая цена | Требует процедуры инициализации, риск накопления ошибок |
Современные датчики часто комбинируют оба принципа: основной абсолютный сенсор дублируется инкрементальным для контроля достоверности данных. Это критично для систем, где ошибка в определении угла может привести к некорректной работе ESP или ложным срабатываниям ADAS.
Преобразование поворота в электрический сигнал
Основной задачей датчика является точная трансформация механического угла поворота руля в электрический сигнал, понятный электронному блоку управления (ЭБУ). Для этого используются разные физические принципы, обеспечивающие высокую надежность и помехоустойчивость измерения.
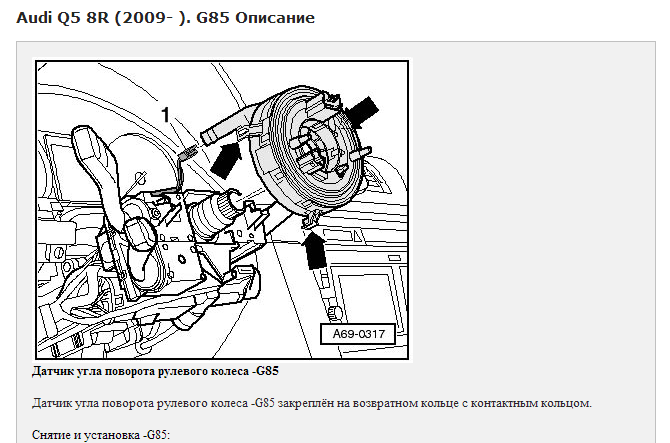
Конструктивно датчик интегрируется в рулевую колонку или рейку и соединяется с валом руля. При вращении рулевого колеса изменяются физические параметры чувствительного элемента, что генерирует выходной сигнал. Тип сигнала зависит от технологии датчика.
Технологии преобразования
Наиболее распространенные методы преобразования:
- Магниторезистивный: Постоянный магнит крепится на валу руля, а чувствительный элемент (мост из магниторезисторов) фиксирует изменения магнитного поля при повороте. Сопротивление резисторов изменяется пропорционально углу.
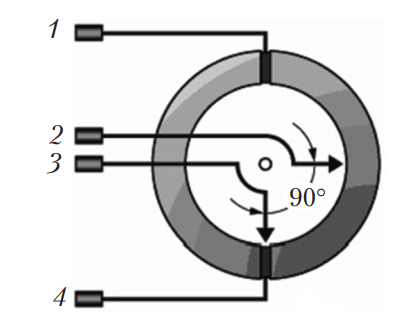
- Оптоэлектронный (инкрементальный): Диск с прорезями вращается вместе с валом. Светодиод и фототранзистор по разные стороны диска создают импульсный сигнал при прохождении света через прорези. Количество импульсов соответствует углу поворота.
- Потенциометрический: Подвижный контакт (бегунок) скользит по резистивной дорожке при повороте вала. Изменение сопротивления преобразуется в переменное напряжение.
Типы выходных сигналов:
| Технология | Форма сигнала | Характеристики |
|---|---|---|
| Магниторезистивный | Аналоговое напряжение (0-5В) или цифровой (SENT, PWM) | Высокая точность, бесконтактный принцип |
| Оптоэлектронный | Импульсы (A/B-фазы) | Определение направления и скорости поворота |
| Потенциометрический | Аналоговое напряжение | Простота, подверженность износу |
ЭБУ анализирует амплитуду, частоту или скважность сигнала, рассчитывая точный угол и направление поворота. Современные датчики часто объединяют несколько технологий для резервирования и диагностики неисправностей.
Типы выходных сигналов: аналоговый или цифровой
Выходные сигналы датчиков угла поворота руля делятся на две основные категории: аналоговые и цифровые. Аналоговый сигнал представляет собой непрерывное изменение напряжения или тока, пропорциональное углу поворота рулевого колеса. Например, при повороте руля от крайнего левого до крайнего правого положения выходное напряжение может линейно изменяться от 0,5 В до 4,5 В. Такая зависимость позволяет напрямую интерпретировать величину сигнала как конкретное угловое положение.
Цифровые датчики преобразуют измеренный угол в дискретный код, передаваемый по протоколам связи. Наиболее распространены импульсные сигналы (например, PWM – широтно-импульсная модуляция) и последовательные интерфейсы (SENT, SPI, CAN). В PWM-сигнале информация зашифрована в длительности импульсов, тогда как протоколы типа SENT передают данные пакетами с кодированными значениями угла и диагностической информацией.
Ключевые отличия технологий
| Параметр | Аналоговый сигнал | Цифровой сигнал |
|---|---|---|
| Тип данных | Непрерывное напряжение/ток | Дискретные коды (биты, пакеты) |
| Помехоустойчивость | Чувствителен к электромагнитным помехам | Высокая (защита CRC, цифровая фильтрация) |
| Точность | Ограничена АЦП ЭБУ и шумами | Определяется разрядностью датчика (до 0,1°) |
| Диагностика | Базовые проверки (обрыв, КЗ) | Расширенная самодиагностика датчика |
Аналоговые датчики проще в конструкции и дешевле, но имеют три критических ограничения:
- Дрейф параметров из-за температуры или старения компонентов
- Погрешности при длинных проводах из-за падения напряжения
- Неспособность передавать дополнительные данные (скорость поворота, температура)
Цифровые решения доминируют в современных автомобилях благодаря:
- Передаче абсолютного угла без постоянной калибровки
- Мультиплексированию сигналов (угол + скорость + диагностика по одной линии)
- Совместимости с архитектурой drive-by-wire и системами ADAS
Определение нейтрального положения (центра)
Нейтральное положение рулевого колеса соответствует прямолинейному движению транспортного средства без отклонения управляемых колёс. Точное определение этого "нуля" критично для корректной работы электронных систем: усилителя руля (ЭУР), систем стабилизации (ESC) и помощи при парковке.
Датчик угла поворота (ДУП) непрерывно отслеживает абсолютный угол поворота руля относительно нейтрали. Для вычисления центра используются следующие методы:
Основные принципы калибровки
Автоматическая калибровка при запуске: После включения зажигания ЭБУ запрашивает данные с ДУП при условии, что колёса стоят прямо (определяется по минимальной разнице сигналов датчиков скорости вращения колёс).
Алгоритмы адаптации в движении: Система анализирует поведение автомобиля:
- Сравнение с датчиками рыскания и ускорения: Если сигналы ДУП указывают на нулевой угол, но датчики ESP фиксируют боковое ускорение/рыскание – выполняется корректировка "нуля".
- Мониторинг траектории: При длительном прямолинейном движении без вмешательства водителя текущее положение руля принимается за нейтраль.
Ручная инициализация: Требуется после замены ДУП или компонентов рулевого механизма. Процедура выполняется:
- Установка колёс строго прямо.
- Активация режима калибровки через диагностическое оборудование.
- Фиксация текущего положения датчика как "0°".
| Метод | Когда применяется | Точность |
| Автокалибровка (старт) | Каждый запуск двигателя | Зависит от позиции колёс |
| Адаптация в движении | Постоянно при эксплуатации | Высокая (косвенный метод) |
| Ручная процедура | После ремонта/замены | Максимальная (прямой ввод) |
Современные ДУП с двойными измерительными элементами повышают надёжность: при выходе одного канала система использует второй, а неисправность фиксируется в памяти ЭБУ.
Связь с блоком управления ЭУР или ESP
Датчик угла поворота рулевого колеса передает данные о текущем положении руля и скорости его вращения напрямую в электронные блоки управления (ЭБУ) систем ЭУР (электроусилитель руля) или ESP (система курсовой устойчивости). Эти сведения поступают по цифровой шине (например, CAN) в режиме реального времени, обеспечивая мгновенную реакцию систем на действия водителя.
ЭБУ ЭУР использует полученную информацию для расчета необходимого усилия на руле: при малых скоростях усилие увеличивается для комфорта, на высокой скорости – уменьшается для повышения устойчивости. Одновременно блок ESP анализирует угол поворота руля совместно с данными о скорости колес, продольном/поперечном ускорении, чтобы выявить расхождение между заданной траекторией (через рулевое управление) и фактическим движением автомобиля.
Критическая роль данных в работе систем

Без точных показаний датчика угла поворота руля ЭУР и ESP не могут функционировать корректно:
- Для ЭУР: Неверный угол → ошибка в расчете усилия → риск слишком "легкого" или "тяжелого" руля.
- Для ESP: Ошибочный сигнал → некорректное определение намерений водителя → ложное срабатывание или бездействие системы при заносе.
| Система | Использование данных датчика | Последствия сбоя |
| ЭУР | Расчет усилия на рулевом валу в зависимости от скорости и угла поворота | Некорректное усилие, отказ усилителя |
| ESP | Сравнение заданного (рулем) и фактического направления движения | Невозможность распознать занос, ложные срабатывания |
Калибровка нулевой точки после замены
Калибровка нулевой позиции обязательна при замене датчика угла поворота руля или компонентов рулевого механизма. Без этой процедуры электронный блок управления (ЭБУ) не сможет корректно интерпретировать сигнал, что приведёт к сбоям в работе систем стабилизации (ESP), помощи при торможении и адаптивного освещения.
Процедура выполняется с помощью диагностического оборудования, подключённого к OBD-разъёму автомобиля. Современные ЭБУ требуют соблюдения строгой последовательности действий для сохранения нового значения нейтрального положения руля.
Алгоритм калибровки
- Установите рулевое колесо в строго прямое положение по меткам на рулевой колонке или ступице.
- Подключите сканер к диагностическому разъёму и включите зажигание (без запуска двигателя).
- В меню диагностики выберите раздел:
- «Рулевое управление» → «Калибровка датчика угла поворота»
- Или аналогичный пункт в зависимости от ПО сканера
- Следуйте инструкциям на экране: подтвердите нулевое положение, дождитесь записи параметров в ЭБУ.
- Выполните тестовую поездку для проверки:
Признак успеха Ошибка калибровки Отсутствие кода неисправности Горит индикатор ESP/Check Engine Прямолинейное движение без увода Самопроизвольное подруливание
Критические требования: автомобиль должен стоять на ровной поверхности, давление в шинах – соответствовать норме, АКБ – полностью заряжена. Невыполнение этих условий исказит калибровочные данные.
Диагностика ошибок через сканер OBD-II
При возникновении неполадок, связанных с датчиком угла поворота рулевого колеса (ДУПРК), сканер OBD-II позволяет быстро считать сохраненные в ЭБУ коды ошибок. Эти коды указывают на конкретные сбои в работе датчика или его цепи, например:
Типичные ошибки включают P0504 (несоответствие сигналов ДУПРК), C0710 (обрыв цепи) или U0126 (потеря связи с модулем). Расшифровка кодов осуществляется через диагностическое ПО, которое отображает не только номер ошибки, но и ее описание, условия возникновения и статус (активная/историческая).
Процедура диагностики
- Подключите сканер OBD-II к разъему автомобиля и включите зажигание.
- Запустите программу диагностики и выполните сканирование ЭБУ на наличие ошибок.
- Проанализируйте коды, относящиеся к ДУПРК:
- Проверьте статус ошибок: активные требуют немедленного устранения.
- Изучите замороженные кадры данных (Freeze Frame) для анализа условий при возникновении сбоя.
- Сравните текущие показания датчика с эталонными значениями в режиме реального времени:
Параметр Нормальные значения Напряжение сигнала 0.5–4.5 В (плавно меняется при повороте руля) Угол поворота в нейтрали ±5° от нулевой отметки - Очистите ошибки после ремонта и проверьте их повторное появление при тестовой поездке.
Важно: Отсутствие кодов ошибок не гарантирует исправность ДУПРК. При подозрении на неполадки дополнительно проверьте физическое состояние датчика, целостность проводки и контактов разъемов.
Устранение зазоров при монтаже
Зазоры между датчиком угла поворота рулевого колеса и его посадочным местом вызывают погрешности в измерениях. Любой люфт приводит к некорректному определению положения руля, что нарушает работу систем стабилизации, адаптивного освещения и помощи при парковке. Жесткая фиксация корпуса исключает механические искажения сигнала.
Точное позиционирование обеспечивается конструкцией крепежных элементов и монтажных фланцев. Производители применяют шлицевые соединения, фиксирующие втулки и юстировочные шайбы для компенсации производственных допусков. Обязательна проверка сопрягаемых поверхностей на отсутствие деформаций и загрязнений перед установкой.
Ключевые методы устранения зазоров
- Применение направляющих штифтов – запрессовываются в корпус рулевой колонки для точного совмещения с отверстиями датчика.
- Использование стопорных пластин – создают равномерное прижатие корпуса по всей плоскости контакта.
- Динамическая калибровка после установки – электронная компенсация остаточных отклонений через диагностическое оборудование.
| Тип крепежа | Назначение | Особенности монтажа |
|---|---|---|
| Торсионные болты | Создание контролируемого усилия затяжки | Требуют динамометрического ключа с заменой после демонтажа |
| Пружинные шайбы | Предотвращение самооткручивания | Устанавливаются под головку болта без дополнительной смазки |
| Конические втулки | Центрирование корпуса датчика | Заменяются комплектом при наличии следов износа |
Важно: Запрещается установка датчика с применением ударных инструментов или герметиков, изменяющих геометрию сопряжения. Проверка отсутствия осевого смещения выполняется ручным покачиванием после фиксации крепежом.
Список источников
При подготовке материалов о принципах работы датчика угла поворота рулевого колеса использовались специализированные технические издания и документация автопроизводителей. Основное внимание уделялось устройству современных сенсоров, методам измерения угла и интеграции с системами управления автомобилем.
Ниже приведен перечень ключевых источников, содержащих детальную информацию о конструкции, типах датчиков и их применении в электронных системах рулевого управления. Все материалы доступны в открытом доступе для углубленного изучения темы.
Техническая литература и стандарты
- SAE J2716: Рекомендации по датчикам рулевого управления для автомобильных систем
- Главы 7-8 учебника "Автомобильные датчики и электронные системы управления" под ред. И.Г. Борисова
- Технический бюллетень Bosch "Steering Angle Sensors: Design and Functionality" (2021)
- Раздел 4.3 справочника "Электронные системы современного автомобиля" А.П. Пехальского
Производственная документация

- Технические спецификации датчиков рулевого управления Continental SMM440
- Руководство по диагностике EPS (Electric Power Steering) Toyota T-TIS (2022)
- Методическое пособие "Диагностика систем активной безопасности" НИИ Автоэлектроники