CAN-модуль - что это и где применяется
Статья обновлена: 01.03.2026
CAN-модуль – специализированный компонент электронных систем, предназначенный для организации связи по протоколу Controller Area Network (CAN). Этот протокол, разработанный для надежной передачи данных в условиях помех, стал стандартом для взаимодействия устройств в реальном времени.
Основное назначение CAN-модуля – обеспечение обмена информацией между микроконтроллерами, датчиками и исполнительными механизмами в рамках единой сети. Его ключевая роль заключается в преобразовании цифровых сигналов процессора в электрические сигналы шины CAN и обратной интерпретации поступающих данных.
Применение таких модулей охватывает автомобильную промышленность (бортовые сети, системы управления двигателем), промышленную автоматизацию (PLC, робототехнику), медицинское оборудование и другие области, где требуется высокая отказоустойчивость и детерминированная передача команд.
Базовый принцип работы CAN-шины
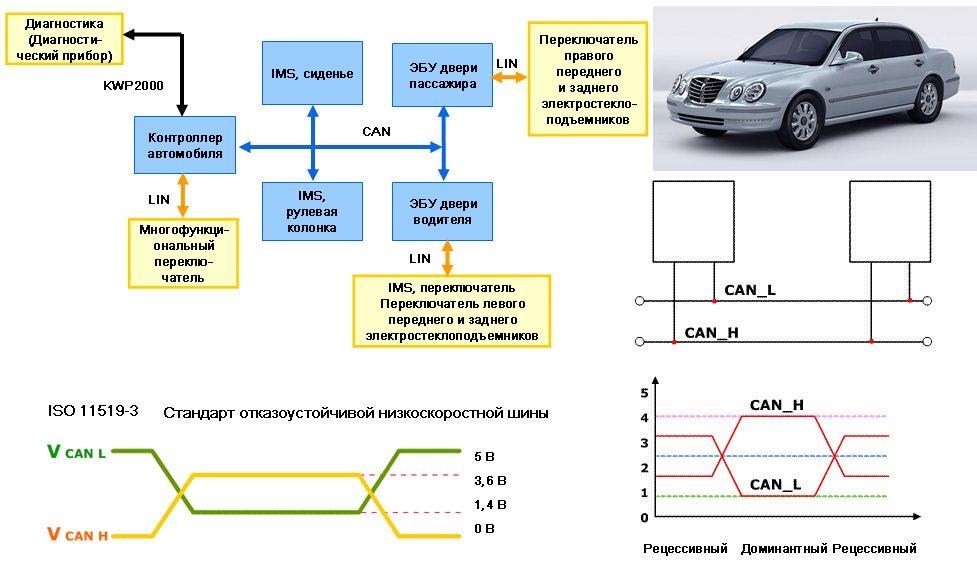
CAN-шина использует дифференциальную передачу сигналов по двум проводам: CAN_H (высокий уровень) и CAN_L (низкий уровень). Логические состояния определяются разницей напряжений между ними: доминантный уровень (логический 0) соответствует разнице ~2В, рецессивный (логическая 1) – близкой к 0В. Это обеспечивает высокую помехоустойчивость в промышленных условиях.
Доступ к шине регулируется методом CSMA/CA+CR (множественный доступ с контролем несущей и арбитражем). Узлы начинают передачу одновременно при свободной шине. При коллизии приоритет определяется идентификатором сообщения в арбитражном поле: узел с меньшим числовым значением ID (высший приоритет) продолжает передачу, остальные переходят в режим приёма. Арбитраж происходит в реальном времени без потери данных.
Структура CAN-кадра
Данные передаются кадрами фиксированного формата:
- Начало кадра (SOF) – доминантный бит, сигнализирующий о старте передачи
- Арбитражное поле – 11-битный (CAN 2.0A) или 29-битный (CAN 2.0B) идентификатор + бит RTR
- Управляющее поле – длина данных (0-8 байт) и резервные биты
- Поле данных – полезная нагрузка
- CRC-поле – контрольная сумма для обнаружения ошибок
- ACK-слот – подтверждение приёма
- Конец кадра (EOF) – 7 рецессивных битов
| Тип кадра | Назначение |
|---|---|
| Data Frame | Передача данных с уникальным ID |
| Remote Frame | Запрос данных у другого узла |
| Error Frame | Сигнализация об ошибке |
| Overload Frame | Запрос задержки между кадрами |
Скорость передачи достигает 1 Мбит/с на сегменте до 40 метров. Механизмы битового стробирования и контроля ошибок (CRC, ACK, битстаффинг) гарантируют целостность данных. Шина поддерживает топологии "линия" или "звезда" с обязательным согласованием волнового сопротивления терминальными резисторами 120 Ом на концах.
Конструктивные элементы типового CAN-модуля
Типовой CAN-модуль представляет собой электронное устройство, реализующее функции контроллера сети CAN и обеспечивающее взаимодействие между микропроцессорной системой и физической шиной. Его конструкция оптимизирована для надежной передачи данных в промышленных условиях.
Основные элементы модуля интегрированы на печатной плате и заключены в защитный корпус, часто оснащенный крепежными элементами для монтажа в электронные блоки управления (ЭБУ). Ключевые компоненты обеспечивают обработку протокола, преобразование сигналов и сопряжение с внешними системами.
Основные компоненты CAN-модуля
- CAN-контроллер: Обрабатывает логику протокола CAN (формирование/прием кадров, проверка CRC, арбитраж шины). Может быть отдельной микросхемой или интегрирован в микроконтроллер.
- CAN-трансивер: Преобразует цифровые сигналы от контроллера в дифференциальные аналоговые сигналы для шины (CAN_H, CAN_L) и обратно. Обеспечивает гальваническую развязку и защиту от помех.
- Микроконтроллер (МК): Выполняет прикладные задачи, управляет CAN-контроллером, обрабатывает данные и реализует логику верхнего уровня.
- Интерфейс связи с хост-системой: Порты или разъемы для подключения к основному устройству (часто SPI, I2C, UART или параллельный интерфейс).
- Разъемы шины CAN: Стандартизированные клеммы (например, 9-pin D-Sub, M12, клеммные колодки) для подключения к CAN-сети.
- Цепи питания: Стабилизаторы напряжения и фильтры для преобразования входного напряжения (обычно 5В, 12В или 24В) в уровни, требуемые компонентами модуля.
- Защитные элементы: Предохранители, TVS-диоды, резисторы для подавления помех и защиты от короткого замыкания, переполюсовки питания или электростатических разрядов (ESD).
Протокол CAN 2.0A против CAN 2.0B: различия
Протокол CAN 2.0A использует стандартный формат кадра с 11-битным идентификатором. Это ограничивает количество уникальных сообщений 2048 вариантами. Данная версия применяется в системах с умеренной сложностью, где не требуется высокая адресация узлов.
Протокол CAN 2.0B поддерживает расширенный формат кадра с 29-битным идентификатором, увеличивая доступное пространство адресов до 536 миллионов сообщений. Он сохраняет обратную совместимость со стандартными кадрами 2.0A, но устройства 2.0A не способны обрабатывать расширенные кадры.
Сравнительная характеристика
| Параметр | CAN 2.0A | CAN 2.0B |
|---|---|---|
| Длина идентификатора | 11 бит | 11 бит (стандартный) или 29 бит (расширенный) |
| Макс. количество идентификаторов | 2048 | 229 (536+ млн) |
| Формат кадра | Базовый (Base Frame Format) | Базовый или расширенный (Extended Frame Format) |
| Совместимость с 2.0A | Полная | Полная (в стандартном режиме) |
| Совместимость с 2.0B | Нет | Полная |
| Биты SRR и IDE | Отсутствуют | Присутствуют в расширенных кадрах |
Контроллеры CAN 2.0B поддерживают два режима работы: активный (обрабатывают оба типа кадров) и пассивный (игнорируют расширенные кадры для совместимости со сетями 2.0A). Расширенный формат добавляет 18-битное поле идентификатора после базового 11-битного ID, бита замены удаленного запроса (SRR) и бита идентификатора расширения (IDE).
Скорости передачи данных в CAN-сетях
Скорость передачи данных в CAN-сетях определяется физическими характеристиками линии связи и требованиями к синхронизации. Максимальная пропускная способность ограничена длиной сети и уровнем электромагнитных помех. Для стандарта ISO 11898-2 (High-Speed CAN) типичные значения варьируются от 125 кбит/с до 1 Мбит/с, где верхний предел достижим только на коротких расстояниях (до 40 метров).
Низкоскоростные сети (ISO 11898-3, Fault-Tolerant CAN) работают в диапазоне 10–125 кбит/с, обеспечивая повышенную устойчивость к сбоям при большей длине сегментов. Выбор конкретной скорости зависит от баланса между требованиями к времени отклика, протяженностью топологии и энергоэффективностью системы.
Факторы влияния на скорость
- Длина шины: Обратная зависимость (1 Мбит/с до 40 м, 500 кбит/с до 100 м, 125 кбит/с до 500 м)
- Тип кабеля: Витая пара с импедансом 120 Ом обязательна для высоких скоростей
- Тактовая синхронизация: Погрешность кварцевых резонаторов ≤1.5%
| Скорость (кбит/с) | Макс. длина (м) | Типовое применение |
|---|---|---|
| 1000 | ≤40 | Системы управления двигателем |
| 500 | ≤100 | Тормозные системы, трансмиссия |
| 250 | ≤250 | Кузовная электроника |
| 125 | ≤500 | Датчики, освещение |
| ≤50 | ≤1000 | Сельхозтехника, промышленные сети |
Реальная пропускная способность ниже номинальной из-за накладных расходов на служебные биты (арбитраж, контрольные суммы, фреймовые ограничители). Например, при скорости 500 кбит/с полезная нагрузка стандартного кадра (8 байт данных) составляет ~300 бит/мс.
Роль трансивера в CAN-модуле
Трансивер (приемопередатчик) служит физическим интерфейсом между контроллером CAN и самой шиной. Он преобразует цифровые сигналы от контроллера в дифференциальные аналоговые сигналы (CAN_H и CAN_L) для передачи по двухпроводной линии. Обеспечивает гальваническую развязку и защиту контроллера от электрических помех, перегрузок и коротких замыканий в сети.
Ключевая задача трансивера – обеспечение надежной связи в условиях промышленных электромагнитных помех. Он детектирует доминантные (логический 0) и рецессивные (логический 1) состояния шины, усиливает сигналы для преодоления потерь в длинных линиях и выполняет терминирование для подавления отражений сигнала. Современные трансиверы поддерживают режимы энергосбережения (спящий, standby) для снижения потребления.
Функциональные особенности

Основные характеристики и возможности трансиверов:
- Скорость передачи: Поддержка стандартов CAN 2.0 (до 1 Мбит/с) и CAN FD (до 5 Мбит/с).
- Защита: Встроенная защита от ESD (до ±15 кВ), переполюсовки питания, перегрева.
- Режимы работы:
| Режим | Назначение |
|---|---|
| Нормальный | Полнофункциональная передача и прием данных |
| Спящий (Sleep) | Минимальное энергопотребление, пробуждение по сигналу контроллера или активности шины |
| Standby | Частичная активность для быстрого восстановления связи |
Типовое применение: В автомобильных ECU (электронных блоках управления), промышленных системах автоматизации (PLC, датчики), медицинском оборудовании. Трансиверы физически реализуют протокол CAN, обеспечивая помехоустойчивость и дальность связи до 1 км (на 125 кбит/с).
Физические интерфейсы: CAN-H и CAN-L
Физический уровень CAN-шины реализуется с помощью дифференциальной пары сигнальных линий: CAN-H (CAN High) и CAN-L (CAN Low). Эти проводники передают данные не абсолютными уровнями напряжения, а разностью потенциалов между ними, что обеспечивает высокую устойчивость к электромагнитным помехам.
В состоянии покоя (рецессивный бит, логическая "1") оба провода находятся под напряжением, близким к половине номинального напряжения шины (~2.5В). При передаче доминантного бита (логический "0") напряжение на CAN-H повышается (~3.5В), а на CAN-L понижается (~1.5В), создавая разность потенциалов около 2В.
Ключевые особенности интерфейса
- Дифференциальная передача: Помехи воздействуют на оба провода одновременно, разность напряжений остается стабильной.
- Согласование импеданса: Требуются терминальные резисторы 120 Ом на концах шины для подавления отражений сигнала.
- Скорость передачи: До 1 Мбит/с (CAN FD) на расстоянии до 40 метров.
Типы логических состояний:
| Состояние | CAN-H | CAN-L | Разность (Vdiff) |
| Рецессив (1) | ~2.5В | ~2.5В | ~0В |
| Доминант (0) | ~3.5В | ~1.5В | ~2В |
Полярность проводов строго регламентирована: перепутывание CAN-H и CAN-L приводит к неработоспособности сети. Для подключения используются витые пары с волновым сопротивлением 100-120 Ом, снижающие излучение помех.
Применение в автомобильных ECU (блоках управления)
CAN-модуль интегрируется в электронные блоки управления (ECU) как аппаратно-программный интерфейс для подключения к шине CAN. Он обеспечивает физический уровень связи (прием/передача сигналов) и реализует протокольные функции: формирование кадров, проверку контрольных сумм (CRC), арбитраж доступа к шине и обработку ошибок. Это освобождает центральный процессор ECU от низкоуровневых задач, сокращая его нагрузку.
Благодаря CAN-модулю ECU взаимодействуют в единой сети, обмениваясь стандартизированными сообщениями (CAN-фреймами) со скоростью до 1 Мбит/с. Ключевые данные включают параметры двигателя (обороты, температура), показания датчиков ABS/ESP, состояние трансмиссии, сигналы рулевого управления и информацию бортовых систем (климат-контроль, освещение).
Основные функции в ECU
- Обмен данными в реальном времени: Синхронизация работы двигателя, трансмиссии и систем безопасности (например, передача данных от датчиков колес к ABS-модулю при торможении).
- Диагностика: Чтение/очистка кодов ошибок (DTC) через унифицированный протокол UDS/OBD-II, удаленное обновление ПО (FOTA).
- Управление энергопотреблением: Координация между ECU при запуске/остановке двигателя (например, сигнал от замка зажигания к блоку BCM).
| Тип ECU | Примеры применения CAN |
|---|---|
| Двигатель (ECM) | Передача данных о крутящем моменте для АКПП, прием скорости от спидометра |
| Тормозная система (ABS/ESP) | Обмен информацией с датчиками колес и блоком управления двигателем для TCS |
| Кузовной модуль (BCM) | Управление светом/стеклоподъемниками по командам с CAN-шины |
Преимущества применения: сокращение количества проводки (до 80% vs point-to-point), повышение отказоустойчивости (автоматическое повторение передачи при сбоях), гибкость при модернизации систем. Без CAN-модуля современные распределенные архитектуры ECU (40+ блоков в авто премиум-класса) были бы невозможны.
CAN в промышленных системах управления ПЛК

CAN-модули в промышленных системах управления на базе ПЛК выступают ключевым интерфейсом для организации распределённых сетей связи между контроллерами, датчиками, исполнительными механизмами и человеко-машинными интерфейсами (HMI). Они обеспечивают детерминированную передачу данных в режиме реального времени, критически важную для синхронизации работы сложных технологических линий, роботизированных комплексов и систем автоматизации зданий.
Интеграция CAN-модулей в ПЛК позволяет создавать масштабируемые и отказоустойчивые архитектуры, где десятки устройств обмениваются параметрами (температура, давление, статус аварий) и управляющими командами без центрального сервера. Это снижает нагрузку на центральный процессор ПЛК и упрощает модернизацию оборудования благодаря модульности и поддержке «горячей» замены компонентов.
Преимущества и сценарии применения
Ключевые преимущества CAN для ПЛК-систем:
- Устойчивость к помехам: дифференциальная передача сигнала гарантирует работу в условиях промышленных электромагнитных помех.
- Приоритизация сообщений: механизм арбитража обеспечивает первичную обработку аварийных сигналов (например, STOP-команд).
- Снижение затрат на кабелизацию: подключение множества устройств к одной двухпроводной шине.
Типовые приложения в промышленности:
| Отрасль | Пример использования |
|---|---|
| Автоматизация производства | Синхронизация конвейеров, контроль позиционирования сервоприводов |
| Энергетика | Мониторинг параметров трансформаторов, управление релейной защитой |
| Транспортные системы | Управление дверями вагонов, диагностика бортового оборудования |
Протоколы верхнего уровня: Для стандартизации данных поверх CAN используются:
- CANopen – для управления приводами и сенсорами
- DeviceNet – подключение I/O-модулей и клапанов
- J1939 – специализированный стандарт для тяжелой техники
Использование в системах телеметрии
CAN-модули служат ключевым интерфейсом для сбора и передачи телеметрических данных от датчиков и контроллеров в распределенных системах. Они обеспечивают надежную доставку параметров (температура, давление, скорость, напряжение, состояние оборудования) в реальном времени благодаря детерминированной передаче сообщений по шине. Интеграция с микроконтроллерами или ПЛК позволяет автоматизировать процесс сбора метрик без перегрузки центрального процессора.
В телеметрических комплексах модули преобразуют "сырые" сигналы с аналоговых/цифровых датчиков в стандартизированные CAN-кадры (по протоколам CANopen, J1939 или SAE J1939). Это упрощает агрегацию данных с разнородных источников (например, двигателя, тормозов, навигации в одном транспортном средстве) и их последующую передачу через шлюзы в облачные системы мониторинга или диспетчерские центры.
Ключевые аспекты применения
- Удаленный мониторинг: Передача данных о состоянии удаленных объектов (энергоподстанции, нефтепроводы) через GSM/LoRaWAN-шлюзы с CAN-интерфейсом.
- Диагностика оборудования: Регистрация и анализ параметров работы агрегатов (оборотов, вибраций, износа) для прогнозирования отказов.
- Оптимизация ресурсов: Сбор показаний счетчиков (электроэнергия, вода) в системах ЖКХ или умных сетях (Smart Grid).
| Отрасль | Пример использования |
|---|---|
| Автотранспорт | Мониторинг расхода топлива, пробега, стиля вождения в телематических системах флота |
| Сельское хозяйство | Передача данных с датчиков влажности почвы, урожайности комбайнов |
| Промышленность | Контроль температуры печей, давления в трубопроводах, скорости конвейеров |
- Датчики фиксируют параметры и отправляют данные на CAN-модуль.
- Модуль упаковывает информацию в CAN-кадры и передает по шине.
- Шлюз конвертирует CAN-трафик в IP/радиопротокол (MQTT, LTE-M).
- Сервер телеметрии визуализирует данные и генерирует тревожные события.
Медицинское оборудование на CAN-шине
CAN-шина обеспечивает надежную и помехоустойчивую связь между компонентами сложных медицинских систем. Её детерминированная передача данных критична для устройств, где задержки или ошибки коммуникации недопустимы. Использование CAN-модулей позволяет объединять датчики, исполнительные механизмы и блоки управления в единую сеть с гарантированным временем отклика.
В медицинской технике стандарт CAN применяется для управления жизненно важными параметрами и синхронизации работы подсистем. Архитектура с двойной витой парой обеспечивает устойчивость к электромагнитным помехам, характерным для операционных и диагностических кабинетов. Протокол поддерживает диагностику неисправностей в реальном времени, что упрощает техническое обслуживание оборудования.
Ключевые применения в медицине
- Аппараты ИВЛ и наркозные станции: Синхронизация датчиков давления, газовых смесителей и клапанов
- Диализные машины: Координация насосов крови, детекторов воздушных пузырей и систем контроля давления
- Мониторы пациента: Интеграция ЭКГ-модулей, пульсоксиметров и измерителей давления
- Автоматизированные лабораторные анализаторы: Управление позиционированием проб, дозаторами и считывателями
| Преимущество CAN | Практическая польза |
|---|---|
| Пакетная передача с контролем ошибок | Гарантия целостности показаний жизненных функций |
| Децентрализация управления | Повышение отказоустойчивости при неисправности узла |
| Гибкая топология (шина, звезда) | Упрощение модернизации оборудования |
В хирургических роботизированных комплексах CAN-шина синхронизирует движение манипуляторов с обратной связью от тактильных сенсоров. Для мобильных медицинских устройств (инфузионные насосы, портативные оксигенаторы) применяются низковольтные CAN-модули с оптимизированным энергопотреблением.
Авиационные и космические применения
В авиации и космонавтике CAN-модули служат критически важным компонентом бортовых сетей благодаря своей отказоустойчивости и детерминированной передаче данных. Они обеспечивают взаимодействие между датчиками, исполнительными механизмами и управляющими компьютерами в условиях экстремальных вибраций, перепадов температур и электромагнитных помех.
Их применение позволяет существенно снизить массу кабельной сети летательных аппаратов за счет замены традиционных аналоговых интерфейсов на цифровую мультиплексированную передачу. Это особенно критично в космических системах, где каждый килограмм полезной нагрузки напрямую влияет на стоимость миссии.
Ключевые направления использования

- Системы управления полетом: Связь между гироскопами, акселерометрами, рулевыми машинками и автопилотом
- Мониторинг двигателей: Передача данных о температуре, давлении, оборотах и вибрациях в режиме реального времени
- Топливные системы: Контроль уровня топлива, управление клапанами и насосами
| Область | Примеры систем |
|---|---|
| Пассажирские самолеты | Системы кондиционирования, освещения салона, управления дверьми |
| Космические аппараты | Управление солнечными батареями, телеметрия, системы жизнеобеспечения |
| Беспилотники | Стабилизация полета, передача видео, навигационные системы |
- Преимущества в авиакосмической отрасли:
- Гарантированное время доставки сообщений
- Автоматическое восстановление при обрывах связи
- Защита от электромагнитных наводок (EMI)
- Простота добавления новых узлов в сеть
Подключение аналоговых датчиков через CAN
Для интеграции аналоговых датчиков в CAN-сеть используются специализированные CAN-модули с АЦП (аналогово-цифровыми преобразователями). Эти устройства преобразуют непрерывные сигналы (напряжение, ток) от датчиков в цифровые значения, упаковывают их в CAN-кадры и передают в сеть по протоколу CAN. Такой подход устраняет необходимость прокладки длинных аналоговых линий к центральному контроллеру.
Модули обеспечивают гальваническую развязку между датчиком и шиной CAN, защищая сеть от помех и скачков напряжения. Они поддерживают различные типы входов: 0-10В, 4-20мА, термопары, RTD. Настройка включает выбор частоты опроса, фильтрацию шумов, калибровку и задание идентификаторов CAN-сообщений для каждого канала.
Ключевые этапы подключения
- Выбор модуля: Определение числа каналов, типа поддерживаемых сигналов (вольтаж/ток), диапазона измерений и требований к точности (разрядность АЦП 12-24 бит).
- Подключение датчиков:
- Напряжение: Прямое соединение с входными клеммами модуля через экранированный кабель
- Ток (4-20мА): Последовательное включение с нагрузочным резистором (обычно 250 Ом)
- Конфигурирование:
Параметр Примеры настроек CAN-ID 0x201, 0x301 (уникальный для каждого канала/группы) Частота обновления 10 Гц, 100 Гц, по событию Масштабирование 4-20мА → 0-100°C (линейная функция) Фильтрация Скользящее среднее, медианный фильтр - Интеграция в сеть: Подключение к шине CAN через разъем 9-pin D-Sub, настройка терминальных резисторов (120 Ом на концах линии).
Преимущества: Сокращение кабельной массы, повышенная помехоустойчивость, централизованное управление множеством датчиков, диагностика обрывов/КЗ линий через статус модуля. Ограничения: Задержка передачи данных (1-100 мс), зависимость от качества АЦП модуля.
Управление электроприводами по CAN
CAN-модули в системах управления электроприводами обеспечивают обмен данными между контроллерами, датчиками и силовыми преобразователями. Через шину передаются команды управления (пуск/стоп, задание скорости/момента), параметры настройки и диагностическая информация в реальном времени.
Протокол гарантирует детерминированную передачу критичных параметров: текущих значений тока, напряжения, температуры обмоток, позиции ротора. Это позволяет реализовать синхронизацию нескольких приводов и мгновенное реагирование на аварийные события.
Ключевые функции CAN-модулей в приводах
- Управление режимами работы: Передача команд для изменения скорости, направления вращения, момента двигателя
- Параметризация: Дистанционная настройка ПИД-регуляторов, ограничений тока, уставок защиты
- Мониторинг состояния: Сбор данных о температуре, вибрации, ошибках перегрузки
- Синхронизация: Координация работы нескольких приводов (конвейеры, робототехника)
| Преимущество | Пример применения |
|---|---|
| Устойчивость к помехам | Промышленные линии в цехах с ВЧ-оборудованием |
| Гибкость топологии | Распределенные системы (краны, экструдеры) |
| Снижение кабельной массы | Мобильная техника (электрокары, спецтранспорт) |
Типовой обмен данными включает:
- Циклические сообщения с параметрами работы (частота 50-1000 Гц)
- Асинхронные аварийные сигналы (перегрев, КЗ, обрыв связи)
- Команды конфигурации (запись параметров NVRAM)
Важно: Для реализации требуются CAN-интерфейсы в частотных преобразователях/сервоприводах и поддержка профилей CANopen CIA-402 или DeviceNet. Это обеспечивает совместимость оборудования разных производителей.
Преимущества перед RS-485 в шумной среде
CAN-модуль обеспечивает превосходную устойчивость к электромагнитным помехам благодаря дифференциальной передаче сигнала по витой паре и встроенным механизмам контроля ошибок. В отличие от RS-485, где помехи могут вызывать необнаруженную потерю данных, CAN автоматически идентифицирует искаженные кадры с помощью многоуровневой проверки (контроль битов, CRC, подтверждение приема). Это критично в промышленных условиях, автомобильных системах и медицинском оборудовании с высоким уровнем электромагнитных наводок.
Арбитраж на уровне битов в CAN гарантирует детерминированное поведение при коллизиях: передатчики с высшим приоритетом автоматически продолжают отправку без потери данных или времени на повторную инициализацию линии. В RS-485 конфликты требуют программной обработки, увеличивая задержки и риск сбоев. Дополнительно CAN обеспечивает глобальное подавление передачи при ошибках (error frame), мгновенно оповещая всю сеть о невалидных данных.
Ключевые отличия в устойчивости к помехам
- Многоуровневая диагностика ошибок: Контроль битового заполнения, CRC-полином (15 бит), формата кадра и подтверждения приема против базового контроля четности в RS-485.
- Автоматический повтор передачи: Аппаратный ретрансмит искаженных кадров без нагрузки на ЦП vs ручной повтор через ПО в RS-485.
- Подавление ошибочных данных: Генерация active error frame блокирует распространение поврежденных сообщений по сети.
| Параметр | CAN | RS-485 |
|---|---|---|
| Обнаружение ошибок | 5 независимых механизмов | Контроль четности (опционально) |
| Ретрансмит при сбое | Автоматический (аппаратный) | Ручной (программный) |
| Поведение при коллизиях | Недетерминированная арбитрация без потерь | Требует алгоритмов повторного опроса |
| Устойчивость к обрывам линий | Автоматическое отключение неисправных узлов | Риск зависания шины |
Доминантно-рецессивная логика CAN (0V/2.5V) обеспечивает помехоустойчивость при обрывах или КЗ линий: доминантное состояние (0) имеет приоритет, предотвращая неопределенность на шине. В RS-485 аналогичные аварии приводят к неконтролируемому поведению системы. Дополнительную защиту создает гальваническая развязка CAN-трансиверов до 5 кВ, что вдвое превышает типовые показатели промышленных RS-485 интерфейсов.
Механизмы обнаружения и коррекции ошибок

В протоколе CAN реализована многоуровневая система контроля ошибок, обеспечивающая высокую надежность передачи данных. Основные методы включают контроль передаваемых битов, проверку формата кадров и использование циклического избыточного кода. Эти механизмы работают параллельно, что позволяет выявлять до 93% всех возможных сбоев.
Обнаруженные ошибки немедленно обрабатываются: передающий узел автоматически повторяет искаженный кадр без вмешательства контроллера. Система гарантирует целостность данных за счет комбинации пяти ключевых технологий, каждая из которых выполняет специфические функции проверки.
Основные методы контроля
- Контроль битов (Bit Monitoring): Каждый передающий узел сравнивает отправляемый бит с уровнем на шине в реальном времени.
- Контроль кадра (Frame Check): Проверка фиксированных битовых полей (CRC-раздел, разделители, ACK-слот) на соответствие формату.
- Циклический избыточный код (CRC): 15-битная проверка для обнаружения искажений в данных с детектированием пакетных ошибок.
- Бит-стаффинг (Bit Stuffing): Добавление противоположного бита после 5 одинаковых бит подряд для синхронизации.
- Подтверждение приема (ACK): Получатели подтверждают корректный прием кадра установкой доминантного бита в ACK-слоте.
| Тип ошибки | Механизм обнаружения | Действие при ошибке |
|---|---|---|
| Битовая ошибка | Bit Monitoring | Немедленная остановка передачи |
| Нарушение формата | Frame Check | Генерация Error Frame |
| Пакетные ошибки | CRC Check | Повторная отправка кадра |
Невозможность коррекции отдельных битов компенсируется автоматической ретрансляцией кадров при обнаружении любых несоответствий. Счетчики ошибок (REC и TEC) обеспечивают переход узлов в пассивный режим или off-line при хронических сбоях, предотвращая блокировку шины.
Реализация защиты от помех в CAN-модулях
CAN-шина функционирует в условиях сильных электромагнитных помех (особенно в промышленности и транспорте), что требует комплексной защиты для гарантии целостности данных. Отказоустойчивость обеспечивается сочетанием аппаратных решений и протокольных механизмов, минимизирующих ошибки передачи.
Ключевые аспекты включают дифференциальную передачу сигналов, гальваническую развязку, экранирование и алгоритмическую обработку ошибок. Эти меры подавляют синфазные шумы, устраняют контуры заземления и корректируют искажённые кадры.
Методы защиты и их применение
- Дифференциальная передача (CAN_H/CAN_L):
Подавляет синфазные помехи за счёт сравнения разности напряжений на витой паре. Импеданс линии стабилизируется терминальными резисторами (120 Ом). - Гальваническая развязка:
Оптоизоляторы или трансформаторы изолируют питание и сигнальные линии, предотвращая паразитные токи и скачки потенциала. - Аппаратная фильтрация:
RC-цепи и ферритовые кольца на входах/выходах подавляют ВЧ-шум. Экранирование кабеля фольгой/оплёткой блокирует внешние EMI.
| Программные механизмы | Назначение |
|---|---|
| Контрольная сумма CRC (15-bit) | Обнаружение искажённых битов в кадре с автоматическим запросом повтора |
| Бит-стаффинг | Синхронизация узлов и предотвращение длинных последовательностей одинаковых битов |
| Доминантный бит ошибки | Принудительное прерывание передачи при обнаружении коллизии |
Дополнительные меры: применение TVS-диодов для защиты от перенапряжений, сегрегация силовых и сигнальных линий при монтаже, а также режим Listen-Only для диагностических узлов, снижающий нагрузку на шину.
Программирование фильтров сообщений
Фильтрация сообщений в CAN-модуле позволяет микроконтроллеру обрабатывать только релевантные данные, снижая нагрузку на ЦПУ и предотвращая переполнение буферов. Это реализуется через аппаратные фильтры приемников, которые анализируют идентификаторы входящих кадров перед их передачей в память.
Настройка фильтров требует точного определения масок и идентификаторов. Маска указывает, какие биты в идентификаторе считаются значимыми (1 – проверять, 0 – игнорировать), а эталонный ID задает конкретное значение для сравнения. Например, при маске 0x7F0 будут проверяться только старшие 8 бит идентификатора.
Типы фильтров и их настройка
Основные подходы к конфигурации:
- Одиночный идентификатор: Фильтр пропускает кадры с точным совпадением ID (маска 0xFFFF).
- Группа идентификаторов: Маска выделяет диапазон адресов (например, маска 0xFF00 + ID 0x1200 принимает сообщения 0x1200–0x12FF).
- Расширенные/стандартные кадры: Фильтры независимо настраиваются для 11-битных (CAN 2.0A) и 29-битных (CAN 2.0B) идентификаторов.
| Параметр | Пример значения | Эффект |
|---|---|---|
| Идентификатор | 0x123 | Базовое значение для сравнения |
| Маска | 0x7F0 | Проверка битов 11-4 (остальные игнорируются) |
| Результат | - | Прием ID: 0x120-0x12F |
Критические аспекты реализации:
- Ограниченное число фильтров (обычно 14-32 в STM32/Cortex-M) требует группировки сообщений.
- Приоритет фильтров: при активации нескольких условий порядок обработки влияет на производительность.
- Динамическое перепрограммирование фильтров возможно, но требует остановки приемника.
В коде прошивки настройка выполняется через регистры модуля CAN. Для STM32 с использованием HAL-библиотек применяются функции типа CAN_FilterInit(), где задаются параметры:
- FilterBank (номер аппаратного фильтра)
- FilterMaskIdHigh/Low (маска)
- FilterFIFOAssignment (назначение принятых данных FIFO0/FIFO1)
Примеры: CAN-модули WAGO, NI, Vector
Компания WAGO предлагает модули серии 750 для промышленной автоматизации, такие как 750-354 (CANopen) и 750-362 (CANopen/CAN 2.0A). Они интегрируются в системы управления через PFC-контроллеры, обеспечивая связь с датчиками, приводами и полевыми устройствами в реальном времени. Решения поддерживают протоколы CANopen и J1939, что упрощает взаимодействие в энергетике и транспорте.
National Instruments (NI) фокусируется на инструментах для разработки и тестирования: модули PCI-8513 (аппаратный интерфейс) и компактные платы серии cDAQ. Они работают с ПО NI-XNET, обеспечивая эмуляцию узлов, анализ трафика и генерацию сигналов. Применяются при создании прототипов автомобильных систем (LIN/CAN FD) и валидации бортовых сетей.
Сравнительные характеристики
| Производитель | Модели | Ключевые особенности | Сферы применения |
|---|---|---|---|
| WAGO | 750-354, 750-362 | Поддержка CANopen, J1939; модульность | Промышленные АСУ ТП, энергосистемы |
| NI | PCI-8513, cDAQ-CAN | Анализ трафика, эмуляция узлов | Автотестирование, R&D |
| Vector | VN1630, VN5640 | Многоканальность (до 4 CAN/CAN FD) | Диагностика автобусов, тестирование ЭБУ |
Решения Vector выделяются мультипротокольной поддержкой: интерфейсы VN1630 (USB) и VN5640 (Ethernet) работают с CAN, CAN FD, LIN через ПО CANoe. Ключевые функции – стресс-тестирование шин, диагностика ошибок и симуляция сетей. Основное применение – автомобильная электроника: отладка ЭБУ, валидация сетевого взаимодействия и протоколов безопасности.
Переход на CAN FD: увеличение скорости
Классическая шина CAN ограничена скоростью 1 Мбит/с и размером данных 8 байт на кадр, что стало критичным для современных систем с растущими объемами информации. CAN FD (Flexible Data-Rate) решает эту проблему, увеличивая пропускную способность до 5-8 Мбит/с в фазе данных и расширяя размер пакета до 64 байт.
Ускорение достигается за счет двухфазной передачи: арбитраж выполняется на стандартной скорости (до 1 Мбит/с) для совместимости с существующей инфраструктурой, а после подтверждения приоритета переключается в высокоскоростной режим. Это позволяет передавать диагностические данные, прошивки и сложные сенсорные показания без фрагментации.
Ключевые преимущества и ограничения
Преимущества скорости:
- Пропускная способность возрастает в 3-8 раз (до 5+ Мбит/с)
- Снижение задержек для критичных по времени систем (например, управление двигателем)
- Поддержка онлайн-обновлений ПО (OTA) за счет передачи крупных блоков данных
Технические компромиссы:
- Требует совместимых контроллеров и трансиверов
- Уменьшается максимальная длина линии: 500 м при 1 Мбит/с → 40 м при 5 Мбит/с
- Необходима оптимизация топологии сети для минимизации расхождений в задержках сигнала
| Параметр | Классический CAN | CAN FD |
|---|---|---|
| Макс. скорость (арбитраж) | 1 Мбит/с | 1 Мбит/с |
| Макс. скорость (данные) | 1 Мбит/с | 5-8 Мбит/с |
| Размер поля данных | 8 байт | 64 байта |
Области внедрения: Электромобили (передача данных батарей), ADAS-системы (обработка данных с лидаров), промышленная автоматизация (синхронизация приводов). Технология сохраняет обратную совместимость с CAN 2.0, позволяя постепенный переход.
Совместимость с протоколом J1939 для грузовиков
Совместимость CAN-модулей с протоколом J1939 обеспечивает стандартизированное взаимодействие электронных блоков управления (ЭБУ) в коммерческом транспорте. Этот протокол, основанный на CAN 2.0B (11/29-битные идентификаторы), определяет структуру сообщений, адресацию узлов и правила передачи данных между компонентами: двигателем, трансмиссией, тормозами, системами диагностики.
Интеграция J1939 в CAN-модули позволяет декодировать параметры в понятные физические величины (обороты, температура, давление) согласно SAE-стандартам. Модули автоматически фильтруют широковещательные сообщения (PGN), игнорируя нерелевантные данные, что снижает нагрузку на микроконтроллер.
Ключевые аспекты реализации
Обязательные функции:
- Поддержка скорости 250 кбит/с с доминантным состоянием ошибки
- Обработка PDU (Protocol Data Unit) включая:
- Идентификатор PGN (Parameter Group Number)
- Адрес источника (SA) и назначения (DA)
- Интерпретация SPN (Suspect Parameter Number) согласно базе данных .dbc
Типовые сценарии применения:
| Задача | Пример данных J1939 |
| Мониторинг топлива | PGN 65252 (Fuel Economy), SPN 183 |
| Диагностика неисправностей | PGN 65226 (DM1), SPN 1213-1215 |
| Управление круиз-контролем | PGN 61444 (Electronic Engine Controller) |
Критически важна поддержка многосекционных сообщений (Transport Protocol), используемых для передачи калибровок или логов. Без корректной обработки фреймов BAM/CM (Broadcast Announce Message/Connection Mode) модуль не сможет читать расширенные диагностические коды (DTC).
Ограничения: Устройства должны учитывать:
- Жёсткие таймауты ответа (3-200 мс)
- Приоритетность сообщений (ID 0-3)
- Зарезервированные адреса ЭБУ (0x80-0xEF)
Список источников
Для подготовки материала о CAN-модулях использовались специализированные технические публикации, документация производителей компонентов и отраслевые стандарты коммуникационных протоколов. Акцент делался на источниках, раскрывающих архитектуру, принципы функционирования и практические аспекты применения технологии в современных инженерных решениях.
Ключевые источники включают официальные спецификации, учебные пособия по встраиваемым системам и авторитетные отраслевые издания, посвященные автомобильной электронике и промышленной автоматизации. Особое внимание уделено актуальным редакциям нормативной документации.
Основные литературные и нормативные источники
- ISO 11898-1:2015 Дорожные транспортные средства. Сетевое взаимодействие контроллеров (CAN). Часть 1: Архитектура передачи данных и физическая сигнализация
- Bosch CAN Specification 2.0 Техническая документация по протоколу CAN (Robert Bosch GmbH)
- К. Шмидт. Встраиваемые системы. Проектирование приложений на микроконтроллерах семейства 8051. Глава 9: Сетевые интерфейсы
- В.П. Дьяконов. CAN-сети. Микропроцессорные системы реального времени. Издательство СОЛОН-Пресс
- Технические отчеты SAE International: J1939 Standards Collection (Применение CAN в коммерческом транспорте)
- А.В. Евстифеев. Интерфейсы CAN. Практика использования в промышленных сетях. Журнал "Автоматизация в промышленности"
- Документация Microchip Technology: MCP2515 Stand-Alone CAN Controller Datasheet
- Texas Instruments Application Note: Designing with CAN Transceivers (SNOA570D)