CAN-шина - как работает и где применяется
Статья обновлена: 01.03.2026
Современные автомобили содержат десятки электронных блоков управления. Сенсоры, исполнительные механизмы и системы безопасности требуют согласованной работы.
CAN-шина – промышленный стандарт цифровой связи. Технология обеспечивает обмен данными между компонентами транспортного средства по единому кабелю.
Протокол заменяет сложные жгуты проводов. Он гарантирует надёжную передачу информации в условиях электромагнитных помех.
Масштабируемая архитектура сети снижает стоимость производства. Она упрощает диагностику и интеграцию новых функций.
Определение сетевой технологии CAN-шины
CAN-шина (Controller Area Network) – это промышленный стандарт последовательной сети, разработанный компанией Bosch в 1983 году для создания распределенных систем управления в автомобилях. Технология относится к категории полевых шин (fieldbus) и обеспечивает надежную передачу данных между электронными блоками управления (ЭБУ) в режиме реального времени.
Ключевая особенность CAN – использование принципа многоабонентской широковещательной сети (multi-master bus), где все узлы равноправны и обмениваются сообщениями по единому каналу связи. Данные передаются в виде коротких пакетов (кадров), содержащих идентификатор приоритета, а не адрес получателя, что позволяет любому узлу в сети принимать или игнорировать сообщение.
Основные характеристики
Технология CAN отличается следующими параметрами:
- Скорость передачи: от 10 кбит/с до 1 Мбит/с
- Топология: линейная шина (витая пара, оптоволокно)
- Доступ к среде: CSMA/CA+AMP (коллизии разрешаются приоритетом идентификатора)
- Типы кадров: Data Frame, Remote Frame, Error Frame, Overload Frame
| Преимущество | Описание |
|---|---|
| Отказоустойчивость | Автоматическое отключение неисправных узлов, контроль ошибок CRC |
| Детерминизм | Гарантированное время доставки критических сообщений |
| Масштабируемость | Поддержка до 110 узлов в одной сети без изменения архитектуры |
Стандарт использует дифференциальную передачу сигналов (CAN_H / CAN_L), обеспечивающую высокую помехозащищенность в электромагнитных полях. Для арбитража доступа к шине применяется метод доминантных (логический 0) и рецессивных (логический 1) битов, где сообщение с более высоким приоритетом (меньшее значение ID) выигрывает конкуренцию за канал.
Базовый принцип работы CAN-шины
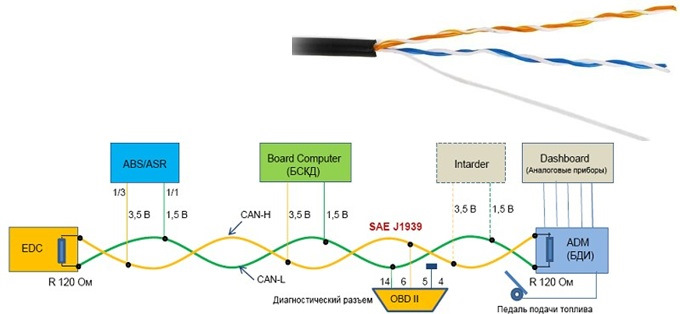
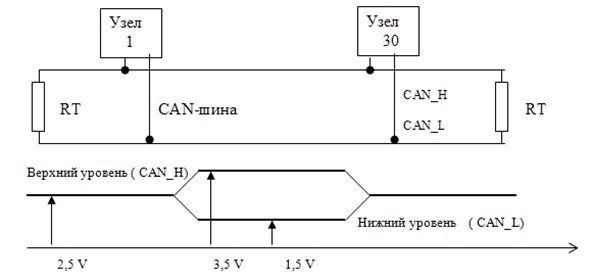
CAN-шина использует дифференциальную передачу сигнала по двум проводам (CAN_H и CAN_L). Состояние шины определяется разностью напряжений между ними: доминантный уровень (логический "0") создается при разнице ~2В, а рецессивный (логическая "1") – при разнице ~0В. Доминантное состояние имеет приоритет и перезаписывает рецессивное.
Узлы сети обмениваются данными через сообщения (фреймы), передаваемые в общую среду. Каждое сообщение содержит уникальный идентификатор, определяющий его приоритет. Перед отправкой узел проверяет состояние шины: если она свободна (рецессивный уровень), начинается передача. При одновременной попытке передачи двух узлов победит сообщение с более высоким приоритетом (меньшим числовым значением идентификатора).
Ключевые аспекты доступа к среде

- Арбитраж идентификаторов: При коллизии узел с низкоприоритетным ID автоматически прекращает передачу и повторяет попытку позже.
- Множественный доступ / детектирование коллизий: Все узлы одновременно контролируют состояние шины в процессе передачи.
- Non-destructive arbitration: Конфликт разрешается без потери данных или времени.
Структура фрейма включает:
- Идентификатор (11 или 29 бит)
- Биты управления (длина данных, тип фрейма)
- Поле данных (0-8 байт)
- Контрольная сумма (CRC)
- Биты подтверждения (ACK)
| Состояние шины | CAN_H (Вольт) | CAN_L (Вольт) | Разность (В) |
|---|---|---|---|
| Доминантное (0) | 3.5 | 1.5 | 2.0 |
| Рецессивное (1) | 2.5 | 2.5 | 0.0 |
Приемники подтверждают корректность фрейма битом ACK, а отправитель повторяет передачу при отсутствии подтверждения. Контрольная сумма CRC и биты контроля формы обеспечивают целостность данных.
Роберт Бош: создатель стандарта в 1983 году
В 1983 году компания Robert Bosch GmbH представила миру Controller Area Network (CAN). Инженеры Боша разработали этот протокол как ответ на растущую сложность автомобильных электронных систем. Необходимо было найти эффективный способ связи между многочисленными блоками управления (ECU) без лавинообразного увеличения веса и стоимости жгутов проводов.
Главной задачей, поставленной перед командой под руководством Ульриха Хаффендера и Хельмута Шелля, было создание надежной, помехоустойчивой и высокоскоростной последовательной шины. Требовалось обеспечить детерминированную передачу данных между микроконтроллерами в реальном времени, что критически важно для функций безопасности, таких как управление двигателем и тормозными системами.
Эволюция и стандартизация
После успешной разработки и тестирования прототипа, спецификация CAN 1.0 была официально опубликована компанией Bosch в 1986 году. В 1987 году вышла обновленная версия CAN 2.0, которая включала как стандартный (11-битный идентификатор), так и расширенный (29-битный идентификатор) форматы кадров. Этот шаг заложил основу для массового внедрения технологии.
Шина быстро доказала свою эффективность и надежность. Первым серийным автомобилем, использующим CAN, стал Mercedes-Benz S-Class (W140) в 1991 году, где она управляла системой впрыска топлива. Широкое признание привело к формальной международной стандартизации:
- ISO 11898-1/-2/-3/-4/-5/-6: Этот пакет стандартов Международной организации по стандартизации (ISO), принятый в 1993 году (и позже обновленный), детально определяет уровни протокола CAN (Data Link Layer) и физические уровни (Physical Layer - High-Speed, Low-Speed Fault-Tolerant, Single-Wire).
- SAE J1939: Стандарт Общества автомобильных инженеров (SAE), основанный на CAN 2.0b (29-бит), который регламентирует использование CAN в коммерческих автомобилях (грузовики, автобусы, сельхозтехника), определяя конкретные сообщения, идентификаторы и протоколы верхнего уровня.
Стандартизация ISO и SAE стала ключевым фактором, превратившим CAN из внутрифирменного решения Bosch в универсальную, общепринятую технологию связи, доминирующую в автомобилестроении и проникшую во многие другие отрасли.
Преимущества CAN перед альтернативами

CAN шина стала предпочтительным решением в автомобилях не случайно. Ее ключевые преимущества включают:
- Надежность: Высокая устойчивость к электромагнитным помехам благодаря дифференциальной передаче сигнала (CAN_H / CAN_L).
- Детерминированность: Механизм арбитража на основе идентификаторов гарантирует, что сообщение с высшим приоритетом будет передано первым, без потерь.
- Многоадресность: Одно сообщение, отправленное одним узлом, может быть принято множеством других узлов, которым оно адресовано.
- Отказоустойчивость: Встроенные механизмы контроля ошибок (CRC, ACK, бит-стаффинг) и возможность продолжать работу при обрыве или КЗ одного из проводов (на низкоскоростных версиях).
- Гибкость и масштабируемость: Относительно просто добавить новые узлы в сеть без изменения архитектуры.
- Снижение стоимости и веса: Замена множества индивидуальных проводов на одну двухпроводную витую пару.
Сравнение с другими автомобильными шинами
| Шина | Типичная скорость | Стоимость | Основное назначение | Топология |
|---|---|---|---|---|
| CAN (High-Speed) | до 1 Мбит/с | Средняя | Критичные системы (двигатель, трансмиссия, тормоза) | Линейная шина |
| LIN | до 20 кбит/с | Низкая | Простые датчики/приводы (стеклоподъемники, зеркала) | Мастер-ведомые |
| FlexRay | до 10 Мбит/с | Высокая | Сверхнадежные/высокоскоростные приложения (x-by-wire) | Звезда/шина/гибрид |
| MOST | до 150 Мбит/с | Высокая | Мультимедийные системы (аудио, видео) | Кольцо |
Несмотря появление более скоростных (FlexRay, Automotive Ethernet) или более дешевых (LIN) альтернатив, CAN остается фундаментальной технологией для связи между критически важными блоками управления в подавляющем большинстве современных автомобилей благодаря оптимальному сочетанию надежности, скорости, стоимости и зрелости стандарта.
Автомобильная промышленность как первоначальная сфера внедрения
Развитие электронных систем в автомобилях 1980-х годов столкнулось с критической проблемой: традиционная проводка становилась чрезмерно сложной, тяжёлой и дорогой из-за роста количества датчиков, исполнительных механизмов и блоков управления. Каждое новое устройство требовало отдельных проводов для связи и питания, что увеличивало массу машины, усложняло сборку и повышало риск отказов.
Инженерам требовался принципиально иной подход для организации обмена данными между компонентами. Решением стала разработка CAN-шины (Controller Area Network), предложенная компанией Bosch в 1986 году. Эта технология позволила объединить все электронные модули автомобиля в единую цифровую сеть, где информация передаётся по двум проводам в виде последовательных сообщений, доступных всем участникам сети.
Ключевые преимущества для автопрома

- Снижение веса и стоимости: Замена десятков километров проводов на одну витую пару.
- Повышение надёжности: Отказоустойчивость благодаря дифференциальным сигналам и автоматическому повтору передачи при ошибках.
- Упрощение модернизации: Лёгкое добавление новых устройств без изменения топологии сети.
- Централизованная диагностика: Возможность считывать ошибки всех систем через один диагностический разъём (OBD-II).
Первый серийный автомобиль с CAN-шиной – Mercedes-Benz W140 (1991 год) – использовал её для синхронизации работы систем двигателя и трансмиссии. К концу 1990-х технология стала отраслевым стандартом: её внедрили для управления антиблокировочной системой тормозов (ABS), подушками безопасности, климат-контролем и другими узлами. Современные машины содержат несколько сегментов CAN-сети (высокоскоростные для критичных систем, низкоскоростные для комфорта), обрабатывающих до тысяч сообщений в секунду.
| Система автомобиля | Роль CAN-шины |
|---|---|
| Двигатель и трансмиссия | Синхронизация впрыска, зажигания, переключения передач |
| Кузовная электроника | Управление светом, стеклоподъёмниками, центральным замком |
| Активная безопасность | Обмен данными между ABS, ESP и датчиками |
| Мультимедиа | Интеграция головного устройства с рулевыми кнопками и дисплеями |
Сокращение электропроводки в современных машинах
До появления CAN-шины каждый электронный блок автомобиля (двигатель, ABS, подушки безопасности, климат-контроль) требовал прямых проводов для обмена данными с другими модулями и датчиками. Это приводило к созданию сложных, многослойных жгутов проводов, которые занимали значительное пространство, увеличивали вес машины и усложняли сборку на конвейере.
CAN-шина заменяет десятки аналоговых сигнальных линий всего двумя проводами (CAN-High и CAN-Low), образующими последовательную сеть. Все узлы подключаются параллельно к этой общей шине, что позволяет передавать цифровые команды и данные между любыми устройствами в стандартизированном формате вместо использования индивидуальных соединений "точка-точка".
Ключевые преимущества сокращения проводки
- Снижение веса – до 50 кг проводов заменяются кабелем массой 2-3 кг
- Упрощение монтажа – стандартизация разъемов и минимизация ручной коммутации
- Повышение надежности – меньше контактов = меньше точек потенциальных отказов
- Гибкость модернизации – добавление новых функций требует лишь подключения модуля к шине
| Параметр | Традиционная система | CAN-сеть |
|---|---|---|
| Количество проводов | До 2000 отдельных жил | 2 основных (витая пара) |
| Длина проводки | Более 4 км | Менее 300 м |
| Время диагностики | Часы (поиск обрывов) | Минуты (автоматическая локализация) |
Дифференциальная передача сигналов по витой паре
В CAN-шине применяется дифференциальная передача сигналов через витую пару проводов: CAN_H (высокий уровень) и CAN_L (низкий уровень). Сигнал кодируется не абсолютным напряжением на линии, а разностью потенциалов между этими двумя проводниками. Логический "0" (доминантный бит) формируется при напряжении CAN_H > CAN_L (типичная разница +2В), а логическая "1" (рецессивный) – при равенстве напряжений (разница ~0В).
Витая пара обеспечивает синфазное подавление помех: внешние электромагнитные наводки одинаково влияют на оба провода, поэтому разность напряжений между ними остается стабильной. Это критически важно для работы в промышленных условиях с высоким уровнем электромагнитных помех. Дополнительную защиту обеспечивает экранирование кабеля в ответственных применениях.
Ключевые преимущества дифференциальной передачи
- Устойчивость к помехам: подавление синфазных шумов до 25 кВ/мксек
- Низкий уровень электромагнитных излучений: противоположные токи в витой паре компенсируют магнитные поля
- Обнаружение сбоев: контроллеры детектируют рассогласование линий
- Дальность связи: до 1 км на скорости 40 кбит/с
Рецессивное состояние поддерживается пассивно резисторами (120 Ом на концах шины), а доминантное – активным притягиванием CAN_H к +3.5В и CAN_L к +1.5В трансиверами узлов. Такая топология обеспечивает проводное И: если хотя бы один узел передает "0", вся шина переходит в доминантное состояние.
Доминантный и рецессивный уровни напряжения
В CAN-шине используется дифференциальная передача сигнала по двум проводам: CAN_H (высокий) и CAN_L (низкий). Состояния шины определяются разностью напряжений между ними: доминантный уровень соответствует логическому "0", а рецессивный – логической "1". Доминантное состояние имеет приоритет над рецессивным, что обеспечивает механизм разрешения коллизий.
При доминантном уровне напряжение на CAN_H превышает CAN_L примерно на 2 В (типовые значения: CAN_H = 3.5 В, CAN_L = 1.5 В). В рецессивном состоянии оба провода находятся под напряжением около 2.5 В, создавая нулевую разность потенциалов. Это позволяет узлам одновременно передавать и отслеживать состояние шины без повреждений электроники.
Ключевые особенности
Приоритет доминантного уровня: если хотя бы один узел передает "0" (доминант), вся шина переходит в это состояние. Рецессивный ("1") фиксируется только когда ВСЕ узлы передают "1". Это основа для арбитража доступа к шине.
- Доминантный бит (0):
- Активное состояние шины
- Передающий узел создает перепад напряжений
- Поглощает ток (низкое сопротивление драйвера)
- Рецессивный бит (1):
- Пассивное состояние шины
- Напряжения выравниваются через резисторы
- Драйверы узлов переходят в высокоомный режим
| Параметр | Доминантный (0) | Рецессивный (1) |
|---|---|---|
| ΔV (CAN_H - CAN_L) | ≈ +2V | ≈ 0V |
| Потребляемый ток | Высокий | Минимальный |
| Приоритет в арбитраже | Высший | Низший |
Важность для коллизий: при одновременной передаче узел, отправляющий "0", подавляет узлы, передающие "1". Проигравший арбитраж немедленно прекращает передачу без потери данных, обеспечивая детерминированное разрешение конфликтов.
Арбитраж сообщений без потери данных
Арбитраж в CAN-шине реализуется через механизм неразрушающего побитового разрешения конфликтов. Каждый передающий узел одновременно отправляет биты своего идентификатора и сравнивает их с уровнем сигнала на шине. Если узел передает доминантный бит (логический 0), а на шине наблюдает рецессивный (логический 1), он немедленно прекращает передачу и переходит в режим слушателя.
Приоритет сообщения определяется значением его идентификатора: чем меньше числовое значение ID, тем выше приоритет. Доминантный бит (0) доминирует над рецессивным (1), обеспечивая победу в арбитраже сообщению с меньшим ID. Например, при одновременной передаче двух сообщений:
| Идентификатор | Биты ID (старшие → младшие) | Результат арбитража |
|---|---|---|
| 010 1010 0011 (ID 675) | 010... | Проигрыш на 2-м бите (рецессивный бит vs доминантный у противника) |
| 010 0011 1001 (ID 281) | 010... | Победа: следующий бит (0) доминирует над 1 |
Ключевые свойства процесса
- Отсутствие потерь данных: Победивший узел завершает передачу без прерывания, проигравшие автоматически повторяют отправку после освобождения шины.
- Гарантированная доставка: Сообщение с высшим приоритетом всегда обрабатывается первым, независимо от времени отправки.
- Эффективность: Конфликт разрешается за несколько битовых времен, не требуя повторной передачи всего кадра.
Архитектура арбитража основана на проводном И: если хотя бы один узел передает доминантный бит, шина переходит в состояние 0. Это позволяет:
- Обнаруживать коллизию на лету в пределах одного битового интервала.
- Обеспечивать детерминированное время реакции для критичных систем (например, тормозных сигналов в авто).
- Исключать потерю информации, так как проигравшие узлы сохраняют данные для повторной попытки.
Формат стандартного CAN-кадра данных
Стандартный CAN-кадр (или CAN 2.0A) состоит из семи основных полей, обеспечивающих детерминированную передачу информации. Каждый кадр начинается с доминантного уровня (логический 0), обозначающего старт передачи (Start of Frame).
Структура кадра включает в себя арбитражное поле для управления доступом к шине, поле управления для указания длины данных, само поле данных (до 8 байт), а также поля для контроля ошибок и подтверждения приема. Завершается кадр флагом конца передачи (End of Frame).
Основные поля кадра
| SOF (Start of Frame) | 1 бит (доминантный 0). Маркер начала кадра. |
| Арбитражное поле | Содержит:
|
| Поле управления | Содержит:
|
| Поле данных | 0-64 бита (до 8 байт). Полезная нагрузка. |
| CRC-поле | 15-битная контрольная сумма + рецессивный CRC-разделитель (1 бит) |
| ACK-слот | 2 бита:
|
| EOF (End of Frame) | 7 рецессивных битов (1111111). Фиксирует конец кадра. |
Ключевые особенности:
- Недиструктурированные данные – содержимое поля данных определяется протоколом верхнего уровня (например, J1939)
- Биты заполнения – после 5 идентичных битов подряд добавляется инверсный бит для синхронизации
- Межкадровое пространство (Intermission) – минимум 3 рецессивных бита между кадрами
Расширенный CAN-формат для сложных систем
Расширенный формат (CAN 2.0B) был разработан для преодоления ключевого ограничения стандартного формата (CAN 2.0A) – недостатка идентификаторов. В стандартном формате используется 11-битный идентификатор, что позволяет создать лишь 2048 уникальных сообщений. Для современных сложных систем (автомобилей, промышленных линий) этого стало недостаточно.
Главное отличие расширенного формата – использование 29-битного идентификатора. Это увеличивает количество возможных уникальных идентификаторов до более чем 536 миллионов. Такой огромный адресный пространство позволяет без конфликтов интегрировать десятки электронных блоков управления (ЭБУ) и тысячи датчиков/исполнительных механизмов в единую сеть.
Ключевые особенности и преимущества

Структура идентификатора: 29-битный ID разделяется на несколько функциональных частей. Первые биты часто указывают на критичность сообщения (приоритет), следующие – на тип данных или систему-отправитель (двигатель, тормоза и т.д.), а оставшиеся – на конкретный сигнал или параметр внутри этой системы. Это обеспечивает логическую организацию трафика.
Совместимость: Контроллеры, поддерживающие расширенный формат (CAN 2.0B active), могут одновременно обрабатывать как 29-битные (расширенные), так и 11-битные (стандартные) кадры. Контроллеры стандартного формата (CAN 2.0A) игнорируют расширенные кадры, воспринимая их как ошибку, что обеспечивает обратную совместимость в смешанных сетях.
Основные преимущества расширенного формата:
- Масштабируемость: Поддержка практически неограниченного роста числа узлов и сообщений в сети.
- Гибкая маршрутизация: Возможность сложной фильтрации сообщений на основе частей ID.
- Повышенная детализация: Точная идентификация источника и типа данных.
- Поддержка сложных протоколов: Основная физическая основа для протоколов верхнего уровня (например, CANopen, J1939), требующих структурированной адресации.
Области применения: Расширенный формат критически важен в автомобилях премиум-класса и электромобилях (обилие систем комфорта, безопасности, управления батареей), в авионике, промышленной автоматизации (робототехника, АСУ ТП), медицинском оборудовании – везде, где требуется высокая плотность данных и множество взаимодействующих подсистем.
Скорости передачи: от 1 кбит/с до 1 Мбит/с
CAN-шина поддерживает широкий диапазон скоростей передачи данных – от 1 кбит/с до 1 Мбит/с. Конкретная скорость выбирается в зависимости от физической длины сети и требований к помехоустойчивости. Чем выше скорость, тем короче допустимая длина линии связи из-за задержек распространения сигнала и электромагнитных помех.
Максимальная скорость 1 Мбит/с достигается на отрезках до 40 метров, что оптимально для высокоскоростных подсистем (например, управления двигателем). Для протяженных сетей (до 5-6 км), таких как сельскохозяйственная техника или промышленные линии, применяются низкие скорости – 10-50 кбит/с. На минимальной скорости 1 кбит/с возможно соединение узлов на дистанциях свыше 10 км при использовании качественной экранированной витой пары.
Зависимость скорости от длины сети
Типичные соотношения скорости и максимальной длины сегмента:
| Скорость | Макс. длина | Типовое применение |
|---|---|---|
| 1 Мбит/с | ≤ 40 м | Бортовые системы автомобиля |
| 500 кбит/с | ≤ 100 м | Промышленные роботы |
| 125 кбит/с | ≤ 500 м | Железнодорожный транспорт |
| 50 кбит/с | ≤ 1 км | Судовые системы |
| ≤ 10 кбит/с | > 5 км | Уличное освещение, удаленные датчики |
Ключевые факторы влияния:
- Затухание сигнала: высокие частоты быстрее ослабляются в длинных кабелях
- Синхронизация узлов: ограниченное время распространения бита
- Помехоустойчивость: низкие скорости устойчивее к электромагнитным наводкам
Протокол автоматически адаптирует битовую синхронизацию под выбранную скорость, сохраняя целостность данных даже в условиях шумов. Это позволяет использовать CAN в критичных системах без потери надежности на всех диапазонах скоростей.
CAN High и CAN Low: назначение линий связи
Физический уровень CAN-шины реализуется через дифференциальную пару проводов: CAN High (CAN-H) и CAN Low (CAN-L). Эти линии работают совместно, обеспечивая передачу данных за счет разности напряжений между ними. Такая архитектура гарантирует высокую устойчивость к электромагнитным помехам, характерную для промышленных и автомобильных сред.
В состоянии покоя (рецессивный бит) обе линии находятся под напряжением около 2.5 В относительно земли. При передаче доминантного бита напряжение на CAN-H повышается до ~3.5 В, а на CAN-L снижается до ~1.5 В, создавая разность потенциалов ~2 В. Именно эта разность кодирует логические состояния.
Ключевые характеристики линий
Типы сигналов:
- Доминантный уровень (логический 0): CAN-H > CAN-L (~2 В разницы)
- Рецессивный уровень (логическая 1): CAN-H ≈ CAN-L (~0 В разницы)
Преимущества дифференциальной передачи:
- Подавление синфазных помех: искажения, одинаково влияющие на оба провода, не изменяют разность напряжений.
- Устойчивость к перепадам температур и старению компонентов.
- Возможность использования витой пары для минимизации электромагнитного излучения.
| Состояние | CAN-H (В) | CAN-L (В) | ΔV (В) |
|---|---|---|---|
| Рецессив (логика 1) | 2.5 | 2.5 | 0 |
| Доминант (логика 0) | 3.5 | 1.5 | 2.0 |
Конечные узлы шины оснащаются согласующими резисторами (120 Ом), предотвращающими отражения сигнала. Обрыв любой линии или короткое замыкание между CAN-H/CAN-L приводит к остановке обмена данными.
Терминальные резисторы 120 Ом для подавления отражений

В CAN-сети сигналы передаются по витой паре в виде дифференциального напряжения. При достижении конца физической линии (разомкнутой топологии) сигнал отражается от точек с высоким импедансом, создавая стоячие волны и искажая передаваемые данные. Эти отражения вызывают ошибки декодирования и снижают надежность связи.
Терминальные резисторы 120 Ом устраняют отражения за счет согласования импеданса линии. Они поглощают энергию сигнала на концах шины, преобразуя её в тепло, что предотвращает возврат волн в кабель. Резисторы устанавливаются строго на крайних узлах сети в соответствии с топологией "линия-шина".
Ключевые аспекты применения
Типовая схема подключения:
- Два резистора по 120 Ом: один на каждом конце шины
- Параллельное включение между CAN_H и CAN_L
- Монтаж максимально близко к разъемам крайних устройств
Последствия отсутствия терминаторов:
- Наложение отраженных и исходных сигналов
- Искажение фронтов импульсов (дребезг)
- Рост ошибок CRC и повторные передачи кадров
- Полный сбой связи при высокой скорости передачи
| Параметр | Без резистора | С резистором 120 Ом |
| Импеданс линии | ~100-130 Ом (нестабильный) | 60 Ом (120∥120) |
| Уровень отражений | До 100% мощности | Менее 5% |
| Форма сигнала | Ступенчатые искажения | Четкие дифференциальные уровни |
Важно: Сопротивление 120 Ом соответствует волновому импедансу типовой CAN-витой пары (Z0≈120 Ом). При использовании кабеля с другим Z0 номинал резисторов требует коррекции. В сетях с более чем двумя терминаторами эквивалентное сопротивление снижается пропорционально, вызывая затухание сигнала.
Узлы сети как активные участники обмена
Каждый узел CAN-шины (например, датчик, блок управления, исполнительное устройство) функционирует как самостоятельный интеллектуальный модуль, оснащённый микроконтроллером и CAN-трансивером. Трансивер преобразует цифровые сигналы контроллера в дифференциальные напряжения для передачи по витой паре и обеспечивает гальваническую развязку. Узлы непрерывно отслеживают состояние шины, анализируя уровень напряжения на CAN_H и CAN_L.
Узлы не имеют уникальных адресов; идентификация сообщений осуществляется через уникальные идентификаторы (ID), содержащиеся в каждом кадре. При передаче все узлы одновременно получают данные, но реагирует только тот, чей ID соответствует содержимому кадра. Такой подход гарантирует детерминированность: критически важные сообщения (например, аварийная остановка) получают высокоприоритетные ID, обеспечивая минимальную задержку доставки.
Принципы взаимодействия узлов
Ключевые аспекты работы узлов в сети:
- Множественный доступ с арбитражем: При одновременной передаче двух узлов арбитраж на основе ID разрешает конфликт – узел с меньшим числовым значением ID (высшим приоритетом) продолжает передачу, остальные переходят в режим приёма.
- Распределённое управление: Отсутствие центрального контроллера – каждый узел инициирует передачу при необходимости, снижая нагрузку на шину.
- Обработка ошибок: Узлы автономно обнаруживают ошибки (CRC, битстаффинг) и изолируют неисправные модули, отключая их от шины.
| Функция узла | Техническая реализация |
|---|---|
| Передача данных | Формирование кадра: ID, поля данных (до 8 байт), контрольной суммы и флагов подтверждения/ошибки. |
| Приём данных | Фильтрация по ID (аппаратные фильтры контроллера), проверка целостности кадра, отправка ACK-бита. |
| Арбитраж | Сравнение уровня передаваемого бита с уровнем на шине в режиме реального времени (доминантный/рецессивный биты). |
Режимы работы узлов динамически меняются: в состоянии активной передачи узел доминирует на шине, при ожидании – анализирует трафик, а при обнаружении сбоя переходит в пассивный режим, прекращая влияние на сеть. Такая архитектура обеспечивает отказоустойчивость: выход одного узла из строя не нарушает работу остальных.
Распределенная система без главного контроллера
CAN-шина реализует децентрализованную архитектуру, где все узлы сети равноправны и не требуют выделенного главного контроллера для управления обменом данными. Каждый подключенный модуль (например, датчик, блок управления двигателем или панель приборов) может самостоятельно инициировать передачу сообщений в шину при необходимости, без запроса разрешения от центрального устройства.
Доступ к среде передачи регулируется механизмом конкурентного арбитража: при одновременной попытке отправки данных несколькими узлами приоритет получает сообщение с наименьшим идентификатором в битовом поле. Проигравшие в арбитраже узлы автоматически прекращают передачу и повторяют попытку позже, что обеспечивает детерминированное время реакции системы.
Преимущества распределенной архитектуры
- Отказоустойчивость: выход из строя любого узла не парализует всю сеть
- Масштабируемость: добавление новых устройств требует только их подключения к шине
- Снижение сложности проводки: замена звездообразной топологии на линейную шину
- Оптимизация времени отклика: критические сообщения с высоким приоритетом обрабатываются первыми
| Тип системы | Арбитраж доступа | Влияние сбоя узла |
|---|---|---|
| Централизованная | Контроллер назначает слоты | Полный отказ сети |
| CAN-шина | Приоритетность сообщений | Локальный отказ |
Данный подход исключает единую точку отказа и позволяет создавать сложные многоуровневые системы управления, где решения принимаются на основе консенсуса данных от всех участников сети. Например, в автомобиле блок ABS может напрямую обмениваться информацией с двигателем и коробкой передач, минуя промежуточные контроллеры.
Идентификаторы сообщений и их приоритетность
Каждое сообщение в CAN-шине содержит уникальный идентификатор (ID), который определяет не только тип данных, но и приоритет сообщения в сети. Идентификатор представляет собой целое число длиной 11 бит (стандартный формат CAN 2.0A) или 29 бит (расширенный формат CAN 2.0B). Чем меньше числовое значение ID, тем выше приоритет сообщения.
Приоритетность критична для управления доступом к шине при одновременной попытке передачи данных несколькими узлами. Узел с сообщением, обладающим более высоким приоритетом (низкий ID), выигрывает арбитраж и получает право передачи, тогда как низкоприоритетные узлы автоматически прекращают передачу и ожидают освобождения шины.
Ключевые принципы работы
Арбитраж на основе ID: Конфликты доступа к шине разрешаются в режиме реального времени через битовый арбитраж. Узлы передают идентификаторы бит за битом, начиная со старшего. Если узел передает доминантный бит (логический 0), а другой – рецессивный (логическая 1), первый побеждает в арбитраже и продолжает передачу.
Правила приоритетности:
- Сообщение с ID=0 имеет наивысший приоритет
- ID=2035 (в 11-битном формате) – один из самых низких
- Приоритет не зависит от типа данных или узла-отправителя
| Идентификатор (11 бит) | Приоритет | Пример применения |
|---|---|---|
| 0x000 (0) | Максимальный | Аварийная остановка двигателя |
| 0x100 (256) | Высокий | Данные АБС |
| 0x500 (1280) | Средний | Обороты двигателя |
| 0x7FF (2047) | Минимальный | Данные климат-контроля |
Важно: Идентификаторы назначаются на этапе проектирования сети и жестко закрепляются за конкретными сообщениями в протоколе верхнего уровня (например, CANopen или J1939). Некорректное распределение ID может привести к задержкам критических данных.
Обнаружение ошибок через битовый мониторинг
Каждый узел CAN-шины, передающий данные, одновременно отслеживает уровень сигнала на линии в реальном времени. Этот процесс называется битовым мониторингом. Его цель – немедленно выявить расхождения между переданным битом и фактическим состоянием шины, что может указывать на коллизии или физические повреждения канала связи.
При обнаружении несовпадения (например, узел отправил доминантный бит "0", но считал рецессивный "1") передатчик фиксирует битовую ошибку. Он немедленно прерывает текущую передачу и отправляет в шину активный флаг ошибки – последовательность из 6 доминантных битов. Это явление, называемое "бит-стаффинг", принудительно останавливает все узлы для предотвращения некорректного приёма данных.
Принципы работы битового мониторинга
Ключевые аспекты механизма:
- Асинхронное сравнение: Контроль происходит для каждого бита кадра, включая арбитражные поля и контрольную сумму.
- Исключения: Мониторинг отключается во время фазы арбитража и при передаче флага ошибки.
- Локализация сбоя: Ошибка регистрируется именно передающим узлом, что упрощает диагностику.
Таблица ниже демонстрирует реакцию системы на типовые несоответствия:
| Переданный бит | Считанный бит | Действие CAN-контроллера |
|---|---|---|
| Доминантный (0) | Рецессивный (1) | Немедленное прерывание передачи, отправка флага ошибки |
| Рецессивный (1) | Доминантный (0) | Игнорирование в поле арбитража, в остальных случаях – ошибка |
Данный механизм гарантирует детерминированную реакцию на физические искажения сигнала менее чем за 23 битовых периода. Совместно с CRC-проверкой и контролем формата кадра, битовый мониторинг обеспечивает целостность данных в условиях электромагнитных помех и коротких замыканий.
Автоматический запрос повторной передачи при сбоях
При передаче данных по CAN-шине возможны ошибки, вызванные электромагнитными помехами, повреждением проводки или конфликтом сообщений. Для их устранения протокол CAN реализует механизм автоматического запроса повторной передачи (Automatic Retransmission Request, ARQ). Каждый узел, обнаруживший ошибку (например, нарушение формата кадра или сбой контроля CRC), немедленно отправляет в шину активный флаг ошибки, прерывая текущую передачу.
Данный флаг воспринимается всеми узлами сети, включая отправителя исходного сообщения. Отправитель, получив сигнал об ошибке, автоматически повторяет передачу того же сообщения без задержек. Такой подход гарантирует, что корректные данные будут доставлены даже в условиях кратковременных помех. Приоритет сообщения при повторной отправке остается неизменным, что исключает блокировку шины.
Ключевые аспекты работы механизма

- Моментальная реакция: Ошибка фиксируется на уровне битов, а не после полной передачи кадра.
- Глобальное оповещение: Флаг ошибки виден всем узлам, синхронизируя их состояние.
- Бесконфликтный приоритет: Повторная отправка сохраняет исходный идентификатор (ID), обеспечивая предсказуемость арбитража.
| Тип ошибки | Действие узла-приемника | Реакция отправителя |
|---|---|---|
| Нарушение формата кадра (Bit Stuffing Error) | Отправка флага ошибки | Повторная передача сообщения |
| Неверная контрольная сумма (CRC Error) | Отправка флага ошибки | Повторная передача сообщения |
| Потеря арбитража (Arbitration Loss) | Не требуется | Автоматическое возобновление отправки после освобождения шины |
Если ошибка сохраняется после многократных попыток (более 127 раз), узел-отправитель переходит в состояние пассивной ошибки, прекращая передачу для предотвращения перегрузки шины. Одновременно другие узлы продолжают работу без прерываний, поддерживая общую работоспособность системы.
Типовая топология "шина" с линейным подключением
В основе классической реализации CAN-шины лежит топология линейная шина (bus). Все электронные блоки управления (ЭБУ), датчики или другие узлы сети (узлы CAN) подключаются параллельно к одной и той же паре физических линий связи: CAN_H (CAN High) и CAN_L (CAN Low). Эта общая среда передачи данных протягивается по всему транспортному средству или системе, подобно магистрали.
Физически линия связи чаще всего представляет собой витую пару проводов. Для обеспечения целостности сигнала и минимизации отражений на обоих концах главной линейной шины обязательно устанавливаются терминальные резисторы (терминаторы). Номинальное сопротивление каждого терминатора составляет 120 Ом, что соответствует волновому сопротивлению кабеля витой пары. Это создает согласованную линию передачи.
Характеристики и преимущества линейной шины
Ключевыми особенностями и преимуществами топологии линейной шины в CAN-сетях являются:
- Простота разводки и монтажа: Основной кабель (витая пара) прокладывается единой линией, а узлы подключаются к нему через относительно короткие отводы (стабы). Это упрощает производство и обслуживание.
- Легкая масштабируемость: Добавление нового узла в сеть теоретически требует лишь его подключения к существующей шине в любой точке, без изменения топологии всей сети (хотя длину и расположение отводов необходимо контролировать).
- Отказоустойчивость (частичная): При выходе из строя одного узла (за исключением случаев короткого замыкания шины на массу или питание) остальные узлы, как правило, сохраняют возможность обмениваться данными между собой по шине.
- Помехоустойчивость: Использование дифференциальных сигналов (разность потенциалов между CAN_H и CAN_L) на витой паре обеспечивает высокую устойчивость к электромагнитным помехам (EMI) и синфазным наводкам.
- Стоимость: Требует меньше кабеля по сравнению с топологией "звезда" для соединения множества узлов.
| Топология | Основное преимущество для CAN | Основной недостаток для CAN |
|---|---|---|
| Линейная шина | Простота, низкая стоимость разводки, легкое масштабирование | Ограничения на общую длину шины и длину отводов; критичность правильной установки терминаторов |
| Звезда | Простота изоляции неисправности сегмента | Требует активного центрального концентратора (хаба), сложнее разводка, дороже, менее отказоустойчива при выходе хаба |
| Кольцо | Избыточность путей передачи | Сложность реализации и управления, более высокая задержка, не типична для CAN |
Именно топология линейной шины с витой парой и терминаторами на концах является наиболее распространенной и рекомендуемой физической реализацией CAN-сетей, особенно в автомобилях, благодаря оптимальному сочетанию надежности, помехоустойчивости, стоимости и простоты внедрения.
Гибкость расширения сети добавлением узлов
Конструкция CAN-шины позволяет подключать новые устройства (узлы) к сети без необходимости внесения изменений в существующую топологию или программное обеспечение других участников. Это достигается за счёт линейной шинной архитектуры, где все узлы параллельно подключаются к двум проводам (CAN_H и CAN_L), а идентификация данных осуществляется через уникальные идентификаторы сообщений, а не адреса устройств.
При добавлении узла достаточно физически подключить его к шине через трансивер, обеспечив корректное согласование волнового сопротивления на концах линии. Новый узел автоматически получает возможность отправлять и принимать сообщения, анализируя их идентификаторы. Существующие компоненты не требуют перенастройки, так как логика работы сети основана на приоритете сообщений, а не на статической адресации.
Ключевые преимущества подхода
- Минимизация простоев: интеграция выполняется "на горячую" без остановки работы сети
- Масштабируемость: поддержка до 110 узлов в стандартной конфигурации (ISO 11898)
- Снижение стоимости модернизации: отсутствие необходимости замены контроллеров или центральных модулей
| Тип изменения | Традиционные сети | CAN-шина |
|---|---|---|
| Добавление датчика | Перепрошивка контроллера, перенастройка ПО | Физическое подключение + программирование только нового узла |
| Замена устройства | Корректировка адресных таблиц | Подключение идентичного по логике узла |
Экономия меди за счет замены индивидуальных проводов
В классических автомобильных системах каждый датчик или исполнительный механизм соединялся с управляющим блоком отдельными проводами, что требовало огромного количества медных кабелей. Например, для связи 10 устройств с центральным процессором понадобилось бы 55 индивидуальных линий (по принципу "каждый с каждым"), а их суммарная длина могла достигать сотен метров.
CAN-шина радикально меняет подход: все компоненты подключаются к единой двухпроводной линии (витой паре). Это сокращает физическое количество проводов до двух, независимо от числа узлов в сети. Такой метод не только упрощает монтаж, но и дает прямой экономический эффект за счет резкого снижения расхода меди.
Ключевые аспекты экономии
- Уменьшение общей массы проводки на 50-70% по сравнению с традиционными схемами
- Снижение затрат на сырье: медь заменяется недорогими UTP-кабелями
- Упрощение экранирования: витая пара эффективно подавляет помехи
| Параметр | Индивидуальная проводка | CAN-шина |
|---|---|---|
| Проводов на 10 узлов | 55+ | 2 |
| Вес меди (на авто) | ~40 кг | ~15 кг |
| Точки подключения | Каждое устройство отдельно | Все устройства на одну линию |
Дополнительная экономия достигается за счет упрощения диагностики и ремонта: вместо проверки десятков проводов достаточно контролировать сигналы на шине. Это сокращает трудозатраты и уменьшает габариты жгутов, что критично в современных автомобилях с плотной компоновкой.
Повышение надежности электронных систем
CAN-шина радикально снижает количество проводки в современных транспортных средствах и промышленных установках, заменяя традиционные точечные соединения между блоками единой двухпроводной линией связи. Это минимизирует точки потенциальных обрывов и коротких замыканий, а также уменьшает общий вес системы.
Протокол CAN включает встроенные механизмы обеспечения достоверности данных: контроль ошибок (CRC, контроль битов), подтверждение приема каждым узлом и автоматический ретрансмит поврежденных кадров. Распределенная архитектура исключает единую точку отказа – выход из строя одного модуля не парализует всю сеть.
Ключевые аспекты отказоустойчивости
- Приоритизация сообщений: Конфликты доступа к шине разрешаются через битовый арбитраж без потери данных или времени
- Автоматическая диагностика: Контроллеры изолируют неисправные узлы и переводят их в пассивный режим, предотвращая "зависание" сети
- Дублирование каналов: В критичных системах (e.g. торможение) применяются резервные CAN-шины
Централизованная диагностика через OBD-разъем позволяет быстро идентифицировать сбои в любом узле сети. Система сохраняет работоспособность даже при частичных повреждениях проводки – например, при обрыве одного из проводов (CAN-H или CAN-L) связь продолжается в аварийном режиме.
| Фактор риска | Защита CAN |
|---|---|
| Электромагнитные помехи | Дифференциальная передача сигналов |
| Перегрузка шины | Арбитраж по идентификаторам |
| Сбой контроллера | Автоотключение неисправного узла |
Упрощение диагностики через единый интерфейс
CAN-шина объединяет все электронные блоки управления (ЭБУ) автомобиля в единую сеть, предоставляя централизованный доступ к диагностическим данным. Вместо проверки каждого узла по отдельности механик подключает сканер к одному стандартному OBD-II разъему, через который считываются ошибки и параметры работы двигателя, трансмиссии, ABS, подушек безопасности и других систем.
Раньше для диагностики требовалось физическое подключение к каждому контроллеру через уникальные интерфейсы, что увеличивало время ремонта и сложность оборудования. CAN устраняет эту проблему, позволяя получать комплексную информацию о состоянии всех систем через единственную точку доступа.
Ключевые преимущества диагностики через CAN
- Скорость поиска неисправностей: одновременный опрос ЭБУ вместо последовательных проверок
- Стандартизация оборудования: совместимость с универсальными диагностическими сканерами
- Глубокая аналитика: отслеживание взаимодействия систем в реальном времени (например, влияние датчика коленвала на впрыск топлива)
- Прогнозирование сбоев: анализ изменяющихся параметров до возникновения критических ошибок
| Без CAN-шины | С CAN-шиной |
| Индивидуальные разъемы для каждой системы | Единый OBD-II порт для всех диагностических операций |
| Ручная расшифровка кодов ошибок для разных протоколов | Автоматическая интерпретация стандартизированных DTC (Diagnostic Trouble Codes) |
| Невозможность отслеживания конфликтов между системами | Синхронизированный анализ данных от взаимосвязанных ЭБУ |
Обмен данными между блоками управления двигателем
CAN-шина обеспечивает синхронный обмен критически важными параметрами между ЭБУ двигателя (ECU), трансмиссии (TCU), тормозной системой (ABS/ESP) и другими узлами. ECU непрерывно передает данные о частоте вращения коленвала, положении дроссельной заслонки, температуре охлаждающей жидкости и давлении топлива, формируя единую информационную среду для согласованной работы систем.
Получая эти параметры в реальном времени, TCU точно выбирает момент переключения передач, а ABS корректирует тормозное усилие при активном ускорении. Одновременно ECU интегрирует данные от систем безопасности (например, статус педали тормоза от ESP) и климат-контроля (нагрузка на генератор), оптимизируя впрыск топлива и угол опережения зажигания для баланса мощности и экологичности.
Примеры передаваемых данных
- От ECU к TCU/ABS: крутящий момент двигателя, частота вращения коленвала, активный режим (старт-стоп).
- От ABS/ESP к ECU: скорость вращения колес, статус активации антиблокировки.
- От TCU к ECU: текущая передача, положение селектора, нагрузка на трансмиссию.
| Параметр | Источник | Получатель | Влияние на работу двигателя |
|---|---|---|---|
| Активная пробуксовка колес | ABS | ECU | Снижение крутящего момента для стабилизации |
| Запрос на экстренное торможение | ESP | ECU/TCU | Прекращение впрыска топлива, размыкание сцепления |
| Перегрузка генератора | ЭБУ энергосистемы | ECU | Повышение холостых оборотов |
Ключевые преимущества: отказ от дублирующих датчиков, мгновенная реакция на изменение условий (например, снижение мощности при перегреве АКПП), диагностика согласованности показаний (обороты коленвала vs скорость движения). Отказ CAN-соединения между ECU и смежными блоками приводит к переходу систем в аварийный режим с ограничением функционала.
Интеграция с системой ABS/ESP
CAN-шина является ключевым элементом для взаимодействия между системой ABS/ESP и другими модулями автомобиля. Она позволяет этим критически важным системам безопасности обмениваться данными в реальном времени с блоком управления двигателем (ECU), электроусилителем руля и датчиками колес. Без единой высокоскоростной шины синхронизация работы компонентов была бы невозможна.
Через CAN передаются параметры, необходимые для корректного функционирования ABS и ESP: скорость вращения каждого колеса, угол поворота руля, поперечное ускорение, давление в тормозной системе и текущий режим работы двигателя. Эти данные используются ESP для расчета вектора движения автомобиля и предотвращения заносов, а ABS – для модуляции тормозного усилия при блокировке колес.
Преимущества интеграции через CAN
- Синхронное срабатывание систем: ECU мгновенно снижает крутящий момент двигателя при активации ABS/ESP
- Обмен диагностическими кодами: единый протокол упрощает выявление неисправностей
- Координация с другими системами: взаимодействие с круиз-контролем и адаптивным освещением
| Передаваемый параметр | Система-источник | Назначение в ABS/ESP |
|---|---|---|
| Скорость вращения колес | Датчики ABS | Выявление блокировки/проскальзывания |
| Положение педали газа | ECU | Коррекция тяги при срабатывании ESP |
| Угол поворота руля | Электроусилитель | Расчет заданной траектории движения |
Благодаря CAN-шине системы безопасности работают как единый комплекс: при активации ESP блок управления двигателем моментально снижает подачу топлива, а электроусилитель руля корректирует усилие. Такая интеграция сокращает тормозной путь на 15-20% и предотвращает до 80% заносов на скользком покрытии.
Связь с панелью приборов и климат-контролем
CAN-шина обеспечивает централизованный обмен данными между электронными блоками управления (ЭБУ) автомобиля, панелью приборов и климат-контролем. Блок двигателя передает на приборную панель параметры работы мотора (обороты, температуру, уровень топлива), а климатическая установка отправляет запросы на включение вентилятора или изменение температуры. Все сигналы упаковываются в единый цифровой поток и транслируются по двухпроводной линии связи.
Панель приборов получает через CAN-шину актуальные показания спидометра, данные о неисправностях и предупреждениях от других систем. Климат-контроль использует шину для синхронизации с датчиками температуры в салоне, управления заслонками и отображения настроек на дисплее. Взаимодействие происходит без прямых проводов между каждым компонентом, что исключает конфликты команд и задержки.
| Компонент | Передаваемые данные | Получаемые данные |
|---|---|---|
| Панель приборов | Запросы диагностики | Скорость, обороты ДВС, уровень топлива, ошибки двигателя |
| Климат-контроль | Требуемая температура, скорость вентилятора | Показания датчиков салона, статус заслонок, температура ОЖ |
Ключевые преимущества интеграции:
- Мгновенное отображение данных о перегреве двигателя на приборной панели
- Автоматическая корректировка климата при изменении нагрузки на ДВС
- Синхронизация подсветки панели с режимами климатической установки
Управление подушками безопасности
CAN-шина обеспечивает мгновенный обмен данными между датчиками удара, блоком управления подушками безопасности (ECU) и исполнительными механизмами. При столкновении акселерометры и датчики давления фиксируют деформацию кузова и передают информацию по CAN-шине в центральный контроллер, который анализирует силу и направление удара.
На основе полученных данных ECU вычисляет необходимость срабатывания конкретных подушек (фронтальных, боковых, шторок) и преднатяжителей ремней. Решение принимается за миллисекунды благодаря высокой скорости передачи CAN-шины (до 1 Мбит/с), что критично для своевременной активации защиты пассажиров.
Ключевые компоненты системы
- Датчики удара: акселерометры в передней части авто, датчики давления в дверях
- Контроллер SRS: обрабатывает данные, определяет алгоритм срабатывания
- Пиропатроны: исполнительные элементы для подушек и преднатяжителей
- CAN-шина: связывает все компоненты в единую сеть
Принципиальная схема работы:
| Этап | Действие |
|---|---|
| 1. Столкновение | Датчики фиксируют удар и отправляют сигнал по CAN-шине |
| 2. Анализ | Контроллер SRS определяет тип и силу удара |
| 3. Активация | ECU инициирует подрыв пиропатронов нужных подушек |
| 4. Контроль | Система диагностирует состояние компонентов после срабатывания |
Отказоустойчивость CAN гарантирует работу системы даже при повреждении части проводки благодаря дублированию сигналов и дифференциальной передаче данных. Регулярная самодиагностика выявляет неисправности (например, обрыв цепи), активируя сигнал на приборной панели.
Применение в рулевом управлении с электроусилителем
CAN-шина обеспечивает централизованное взаимодействие между блоком управления электроусилителем руля (ЭУР) и другими системами автомобиля. Блок ЭУР непрерывно получает через шину данные о скорости движения, оборотах двигателя, угле поворота рулевого колеса и текущем режиме работы ESP/ABS.
На основе полученных параметров блок ЭУР мгновенно регулирует усилие на руле: снижает его на высоких скоростях для повышения стабильности и увеличивает на низких (например, при парковке) для комфорта водителя. Синхронизация с системами стабилизации позволяет автоматически корректировать траекторию движения при заносе.
Ключевые функции CAN-шины в ЭУР
- Обмен данными в реальном времени: передача 20-30 параметров от датчиков и систем со скоростью до 500 кбит/с
- Адаптивное управление усилием: автоматическая подстройка сопротивления руля под условия движения
- Координация с безопасностью: совместная работа с ESP для импульсного подруливания при экстренных ситуациях
- Диагностика неисправностей: отправка кодов ошибок ЭУР на центральный дисплей
| Параметр с CAN-шины | Влияние на работу ЭУР |
| Скорость автомобиля | Определяет базовый уровень усилия (обратная пропорция) |
| Угол поворота руля | Рассчет требуемого крутящего момента |
| Данные ESP о проскальзывании | Активация корректирующего подруливания |
| Режим движения (Comfort/Sport) | Изменение жесткости рулевого управления |
Интеграция через CAN-шину исключает необходимость дублирования датчиков и обеспечивает согласованную работу ЭУР с круиз-контролем, парковочными ассистентами и системами автономного вождения. Отказоустойчивость шины гарантирует сохранение управления даже при частичных повреждениях линии связи.
CAN-шина в современных системах помощи водителю (ADAS)
В современных автомобилях CAN-шина выступает центральной нервной системой для Advanced Driver Assistance Systems (ADAS). Она обеспечивает мгновенный обмен критически важными данными между многочисленными датчиками (радарами, камерами, лидарами, ультразвуковыми сенсорами) и исполнительными модулями (тормоза, рулевое управление, двигатель). Без высокоскоростной и надежной передачи этой информации в реальном времени корректная работа систем помощи была бы невозможна.
Надежность шины CAN критична для безопасности: ее отказоустойчивая архитектура с дифференциальной передачей сигналов обеспечивает устойчивость к электромагнитным помехам и коротким замыканиям. Это позволяет системам ADAS функционировать стабильно даже в сложных условиях, например, при одновременной активации нескольких ассистентов в плотном городском потоке или на мокрой дороге.
Конкретные применения CAN в ADAS
CAN-шина интегрирует работу ключевых ассистентов:
- Адаптивный круиз-контроль (ACC): Получает данные о скорости от колесных датчиков и расстоянии до впереди идущего автомобиля от радара/камеры. Через CAN отправляет команды на модуль управления двигателем и тормозную систему для плавного ускорения/замедления.
- Система экстренного торможения (AEB): При угрозе столкновения данные с камеры и радара по CAN мгновенно передаются в блок управления тормозами для автоматического срабатывания.
- Удержание в полосе (LKA): Камера распознает разметку и через CAN отправляет сигнал на электроусилитель руля для корректировки траектории.
- Системы мониторинга "слепых" зон (BSM) и предупреждения о перекрестном движении сзади (RCTA): Ультразвуковые/радарные датчики передают информацию о приближающихся объектах в CAN, а блок управления активирует предупреждающие индикаторы на зеркалах или в приборной панели.
- Парковочные ассистенты: Объединяют данные с ультразвуковых датчиков по периметру авто через CAN, формируя единую картину препятствий и управляя информацией на мультимедийном экране/звуковыми сигналами.
Преимущества использования CAN для ADAS:
| Характеристика | Польза для ADAS |
|---|---|
| Высокая скорость передачи | Минимальные задержки для реакции в критических ситуациях (например, экстренное торможение) |
| Надежность и отказоустойчивость | Обеспечение бесперебойной работы систем безопасности даже при частичных повреждениях проводки |
| Стандартизация протокола | Упрощение интеграции компонентов от разных производителей в единую систему |
| Централизация данных | Возможность комплексного анализа информации от всех сенсоров для принятия решений (например, объединение данных камеры и радара) |
Развитие автономного вождения напрямую зависит от эволюции сетевых технологий в автомобиле. Хотя для обработки огромных массивов данных с камер и лидаров уже используются более скоростные шины (Ethernet), CAN остается незаменимым для базовых, критичных к надежности функций ADAS и связи между главными управляющими модулями, обеспечивая фундамент безопасности.
Промышленная автоматизация и CANopen
В промышленной автоматизации CAN-шина обеспечивает надежную передачу данных между датчиками, исполнительными механизмами и контроллерами в условиях электромагнитных помех. Её детерминированная работа и отказоустойчивость критичны для систем управления конвейерами, роботами и технологическими линиями, где задержки или ошибки недопустимы.
CANopen, построенный на основе CAN-шины, стандартизирует взаимодействие разнородных устройств через единые протоколы и объектные словари. Этот открытый протокол высокого уровня устраняет необходимость разработки уникальных интерфейсов для каждого компонента, упрощая интеграцию и диагностику сложных промышленных систем.
Применение CANopen в промышленности
Протокол реализует ключевые функции:
- Управление узлами: Единые команды запуска/остановки через Network Management (NMT).
- Синхронизация: Точная координация действий устройств с помощью SYNC-телеграмм.
- Экстренная связь: Мгновенная передача аварийных сообщений (EMCY) при нештатных ситуациях.
Объектный словарь (OD) – центральный элемент CANopen, где каждому параметру (скорость двигателя, температура) присвоен уникальный 16-битный индекс и 8-битный суб-индекс. Это позволяет унифицировать доступ к данным:
| Тип данных в OD | Примеры | Протокол доступа |
|---|---|---|
| Конфигурация | Скорость реакции, пределы | SDO (Service Data Object) |
| Реальные показатели | Текущие обороты, давление | PDO (Process Data Object) |
PDO обеспечивают скоростной обмен циклическими данными без заголовков, используя предопределенные идентификаторы. SDO, напротив, применяются для асинхронной настройки параметров через клиент-серверную модель. Такая архитектура позволяет масштабировать системы от простых линий до целых заводов, сохраняя предсказуемость времени отклика.
Протокол поддерживает горячее подключение устройств и автоматическое восстановление после сбоев. Инструменты вроде EDS-файлов (Electronic Data Sheet) описывают характеристики каждого узла, упрощая конфигурирование и замену оборудования без остановки производства.
Медицинское оборудование с CAN-интерфейсом
В медицинской технике CAN-шина служит надёжной основой для связи между критически важными компонентами сложных аппаратов. Её внедрение позволяет создавать модульные системы, где отдельные блоки (сенсоры, исполнительные механизмы, блоки управления) обмениваются данными в режиме реального времени по единому стандартизированному протоколу. Это обеспечивает синхронизацию работы всех частей устройства и централизованный контроль.
Устойчивость шины к электромагнитным помехам, присущим медицинской среде, и механизм обнаружения ошибок гарантируют целостность передаваемой информации. Это критически важно для точности диагностики и безопасности терапии, исключая риски, связанные с искажением данных или потерей команд.
Ключевые применения в медицине
CAN-интерфейс интегрирован в широкий спектр медицинских устройств:
- Аппараты ИВЛ (искусственной вентиляции лёгких): Координирует работу клапанов подачи газов, датчиков давления/потока, мониторов и аварийных систем. Гарантирует точное соответствие заданных параметров дыхания (объём, давление, частота) реальному процессу.
- Анестезиологические станции: Обеспечивает взаимодействие дозиметров летучих анестетиков, испарителей, систем мониторинга концентрации газов и СО2, а также сигнализации. Позволяет автоматически корректировать подачу веществ на основе данных с датчиков.
- Диализные аппараты: Управляет насосами крови и диализата, клапанами, детекторами давления и утечки, системами баланса жидкости и нагрева. Контролирует безопасность процедуры гемодиализа или перитонеального диализа.
- Медицинские кровати и столы: Обеспечивает связь между пультом управления, двигателями регулировки положения (головы, ног, высоты), датчиками веса пациента и системами безопасности (например, блокировка при нештатной ситуации).
- Мобильные рентген-системы и операционные столы: Координирует движение компонентов, позиционирование, блокировку и передачу статуса готовности.
Преимущества использования CAN в медоборудовании:
- Повышенная надёжность и отказоустойчивость: Дублирование каналов и автоматическое отключение неисправных узлов без остановки всей системы.
- Упрощение диагностики и обслуживания: Встроенная диагностика шины помогает быстро локализовать неисправность.
- Гибкость и масштабируемость: Лёгкость добавления новых модулей (датчиков, мониторов) без кардинальной переделки архитектуры.
- Снижение сложности проводки: Замена множества индивидуальных проводов на одну двухпроводную витую пару.
- Централизованное управление и мониторинг: Интеграция данных со всех подсистем на главный дисплей или в систему архивирования.
Связь между компонентами умных зданий
CAN-шина выступает центральной нервной системой для интеграции разнородных устройств в умных зданиях, обеспечивая их слаженную работу. Она объединяет датчики температуры, освещенности, безопасности, климатические установки и системы управления энергопотреблением в единую сеть с минимальной задержкой передачи данных. Благодаря детерминированной передаче сообщений и устойчивости к помехам, шина гарантирует безотказную работу критически важных систем, таких как пожарная сигнализация или контроль доступа.
Использование единого протокола связи устраняет необходимость в сложных преобразователях интерфейсов между компонентами от разных производителей. Это упрощает масштабирование инфраструктуры: добавление новых датчиков или исполнительных устройств требует лишь их подключения к общей шине с уникальным идентификатором. Центральная система управления получает возможность в реальном времени анализировать данные со всех узлов и оптимизировать ресурсы, например, снижая отопление при открытых окнах или включая свет только в занятых помещениях.
Ключевые преимущества CAN-шины в умных зданиях
- Отказоустойчивость: Автоматическое повторение передачи при коллизиях и продолжение работы при неисправности отдельных узлов
- Энергоэффективность: Синхронизация работы HVAC-систем, освещения и солнечных батарей на основе комплексных данных
- Безопасность: Шифрование критичных команд (разблокировка дверей, отключение сигнализации)
| Компонент системы | Функция через CAN-шину |
| Датчики движения | Активация освещения и камер при обнаружении присутствия |
| Контроллеры отопления | Корректировка температуры по данным погодных сенсоров |
| Системы вентиляции | Автоматическое проветривание при превышении CO2 |
Реализация распределенного управления позволяет устройствам обмениваться данными напрямую без постоянного обращения к центральному серверу. Например, датчик протечки воды может немедленно передать команду на закрытие электромагнитного клапана, минимизируя ущерб. Такая архитектура снижает нагрузку на процессор управления и обеспечивает мгновенную реакцию на аварийные события.
Стандартизация физического уровня (витая пара) упрощает монтаж и обслуживание инфраструктуры. Технология поддерживает топологию "линейная шина" с подключением до 110 устройств на сегмент длиной до 1 км, что оптимально для крупных коммерческих объектов. Совместимость с протоколами верхнего уровня (например, CANopen) обеспечивает интеграцию с облачными платформами для аналитики и удаленного контроля.
SocketCAN: реализация в Linux-системах
SocketCAN представляет собой стек протоколов для работы с CAN-шиной, интегрированный непосредственно в ядро Linux. Эта реализация заменяет устаревшие подходы с использованием символьных устройств (например, /dev/can0), предоставляя стандартизированный сетевой интерфейс на основе сокетов Беркли. Модель взаимодействия строится по аналогии с TCP/IP, где CAN-интерфейсы отображаются как сетевые устройства (can0, can1 и т.д.), управляемые инструментами вроде iproute2.
Архитектура SocketCAN включает несколько ключевых компонентов: драйверы контроллеров CAN (обеспечивают физический уровень), виртуальные CAN-интерфейсы (vcan для эмуляции), а также механизмы для маршрутизации (cangw) и логирования (canlogd). Фильтрация сообщений выполняется на уровне ядра, что снижает нагрузку на пользовательское пространство и гарантирует детерминированную обработку высокоприоритетных фреймов.
Основные возможности и инструменты
- Управление интерфейсами: Настройка скорости (125 Kbit/s – 1 Mbit/s), режимов (listen-only, loopback) через ip link:
ip link set can0 type can bitrate 500000ip link set can0 up
- Анализ трафика: Утилиты candump, canplayer для мониторинга и воспроизведения.
- Программирование: Использование стандартных сокетов с доменом PF_CAN:
socket(PF_CAN, SOCK_RAW, CAN_RAW); bind(s, &addr, sizeof(addr));
| Компонент | Назначение |
|---|---|
| can-utils | Базовые консольные инструменты для настройки и отладки |
| CAN GW (cangw) | Маршрутизация фреймов между интерфейсами |
| BCM (Broadcast Manager) | Управление периодическими сообщениями |
Для разработки приложений доступны библиотеки (C, Python-can) с поддержкой всех типов CAN-фреймов (data, remote, error, overload). SocketCAN обеспечивает низкоуровневый доступ с возможностью тонкой настройки фильтров и таймингов, что критично для задач реального времени в робототехнике, автомобильных системах и промышленной автоматизации.
Протоколы верхнего уровня J1939 для грузовиков
Стандарт SAE J1939 определяет набор протоколов верхнего уровня для CAN-шины, специально разработанных для тяжелой техники, автобусов и грузовых автомобилей. Он регламентирует форматы сообщений, адресацию устройств, параметры данных и правила взаимодействия электронных блоков управления (ЭБУ) в транспортном средстве.
J1939 использует 29-битные идентификаторы CAN-кадров, где закодированы приоритет сообщения, код параметра (PGN - Parameter Group Number), источник и назначение данных. Это позволяет организовать детерминированную передачу критической информации (оборотов двигателя, давления масла, скорости) и диагностических кодов (DTC) между десятками узлов: от двигателя и тормозной системы до климат-контроля и трейлера.
Ключевые компоненты J1939
- PGN (Parameter Group Number) – идентификатор группы параметров (например, PGN 61444: скорость вращения колес)
- SPN (Suspect Parameter Number) – уникальный номер сигнала в группе (SPN 91: скорость автомобиля)
- Адресация: Каждому ЭБУ присваивается уникальный адрес (0-253)
- Многосегментные сообщения: Передача больших данных (прошивки, журналы) через TP-CM (Transport Protocol)
| Тип данных | Пример PGN | Частота обновления |
|---|---|---|
| Данные двигателя | 61443 | 100 мс |
| Тормозная система | 65265 | 50 мс |
| Диагностика (DTC) | 65226 | По запросу |
Протокол поддерживает широковещательную рассылку (broadcast) для синхронизации узлов и адресную передачу для управления конкретными устройствами. Благодаря встроенным механизмам безопасности (проверка контрольных сумм, таймауты ответа) обеспечивается отказоустойчивость в условиях электромагнитных помех.
- Упрощение интеграции компонентов от разных производителей
- Стандартизация диагностики через разъем OBD-II
- Оптимизация нагрузки на шину за счет приоритизации сообщений
Варианты физического уровня: CAN-FD
CAN-FD (Controller Area Network Flexible Data-Rate) является эволюционным развитием классической CAN-шины, сохраняя базовые принципы сети, но существенно увеличивая пропускную способность. Ключевое отличие заключается в использовании двухскоростного режима передачи: стандартная скорость применяется для арбитража и служебных битов, а повышенная – исключительно для передачи полезных данных.
Физический уровень CAN-FD остаётся совместимым с классической CAN (ISO 11898-2), используя ту же дифференциальную передачу по витой паре. Однако повышенные скорости передачи данных (до 5 Мбит/с в данных против 1 Мбит/с в арбитраже) предъявляют жёсткие требования к целостности сигнала. Это требует тщательного контроля импеданса кабелей, качества терминальных резисторов (120 Ом) и минимизации длины stub-линий.
Критические аспекты реализации физического уровня
Для стабильной работы CAN-FD необходимо обеспечить:
- Строгое согласование волнового сопротивления – отклонения в кабеле или разъёмах вызывают отражения сигнала
- Короткие ответвления (stubs) – не более 0.1-0.2 м для минимизации искажений
- Повышенную помехоустойчивость – экранирование кабеля при работе в электромагнитных полях
- Соответствие стандарту CAN FD CiA 601-4 – рекомендации по проектированию топологий
| Параметр | Классический CAN | CAN-FD |
|---|---|---|
| Макс. скорость данных | 1 Мбит/с | 5-12 Мбит/с |
| Длина поля данных | 8 байт | 64 байта |
| Требования к кабелю | ISO 11898-2 | ISO 11898-2 + контроль импеданса |
| Топология | Линейная шина | Звезда/гибрид (с активными повторителями) |
Переход на CAN-FD позволяет увеличить пропускную способность сети в 3-8 раз без смены физической среды, но требует пересмотра проектных решений:
- Расчёт задержек распространения сигнала при смешанных скоростях
- Верификация целостности сигнала осциллографом
- Применение активных повторителей для сложных топологий
- Обновление диагностического оборудования для поддержки FD-формата
Повышенная скорость данных в CAN Flexible Data-Rate
Классическая CAN-шина ограничена скоростью передачи 1 Мбит/с, что недостаточно для современных систем с растущими объемами данных. CAN FD решает эту проблему, увеличивая пропускную способность до 5 Мбит/с в фазе данных и сохраняя совместимость с существующей физической средой передачи.
Ключевое отличие – сегментированная структура кадра: арбитражная фаза (идентификатор) работает на стандартной скорости для совместимости, а фаза передачи полезной данных (до 64 байт) использует ускоренный режим. Это позволяет сократить время обновления критических параметров в системах управления двигателем, АБС или мультимедийных комплексах.
Технические аспекты реализации
- Динамическое переключение скорости: Контроллер автоматически меняет битрейт после арбитража.
- Увеличенный размер данных: Полезная нагрузка расширена с 8 до 64 байт в одном кадре.
- Повышенная помехоустойчивость: CRC-поле увеличено до 21 бита для защиты длинных пакетов.
| Параметр | CAN 2.0 | CAN FD |
|---|---|---|
| Макс. скорость данных | 1 Мбит/с | 5 Мбит/с |
| Размер кадра данных | 8 байт | 64 байта |
| Арбитражная скорость | До 1 Мбит/с | До 1 Мбит/с |
Внедрение CAN FD особенно критично для электрифицированного транспорта и автономного вождения, где требуется передача больших массивов данных сенсоров (лидары, камеры) в реальном времени без задержек. Технология сохраняет детерминированность и надежность классической шины, исключая коллизии при арбитраже.
Цифровые диагностические разъемы OBD-II с CAN
Стандарт OBD-II (On-Board Diagnostics) регламентирует физические и программные параметры диагностического интерфейса транспортных средств. Его ключевая функция – унификация доступа к данным электронных блоков управления (ЭБУ) для выявления неисправностей, контроля выбросов и мониторинга систем автомобиля. Разъем OBD-II всегда расположен в зоне доступа водителя (обычно под рулевой колонкой) и имеет 16-контактную конфигурацию.
Протокол CAN (Controller Area Network) стал основой для OBD-II в современных автомобилях после его обязательного внедрения с 2008 года (стандарт EOBD в Европе). Он заменил более медленные последовательные интерфейсы (K-Line, J1850), обеспечив высокоскоростную двунаправленную связь между диагностическим оборудованием и ЭБУ. Данные передаются в виде цифровых пакетов по двум витым парам проводов (CAN High и CAN Low), что гарантирует помехоустойчивость.
Преимущества интеграции CAN в OBD-II
- Скорость обмена: Пропускная способность до 1 Мбит/с позволяет быстро считывать коды ошибок и потоковые параметры в реальном времени (обороты, температура, давление).
- Параллельный опрос устройств: Сканер может одновременно взаимодействовать с несколькими ЭБУ (двигатель, трансмиссия, ABS) через единую шину.
- Помехозащищенность: Дифференциальная передача сигнала минимизирует влияние электромагнитных помех.
- Стандартизация: Упрощает разработку универсальных диагностических инструментов.
При подключении сканера к OBD-II с CAN-протоколом происходит автоматическое согласование скорости обмена и формата данных. Основные диагностические команды стандартизированы (например, режим запроса текущих данных – PID), но производители часто используют расширенные протоколы (UDS, KWP2000) для доступа к специфическим функциям.
Считывание кодов неисправностей через CAN
Современные автомобили используют CAN-шину для централизованного хранения диагностических данных. При возникновении неполадок электронные блоки управления (ЭБУ) генерируют стандартизированные коды ошибок (DTC – Diagnostic Trouble Codes), которые записываются в общую сеть. Эти коды содержат идентификатор неисправного модуля, тип сбоя и дополнительные параметры события.
Доступ к диагностической информации осуществляется через специальный разъём OBD-II (On-Board Diagnostics), физически подключённый к CAN-шине. Считывание выполняется с помощью:
- Сканеров OBD2 (портативные или стационарные)
- Диагностических программ на ПК/ноутбуке с адаптером
- Профессиональных тестеров дилерских СТО
Для расшифровки кодов применяются стандартизированные форматы:
| Формат кода | Структура | Пример |
|---|---|---|
| SAE J2012 | Буква + 4 цифры (P0XXX, C1XXX и т.д.) | P0302 – пропуски зажигания в цилиндре 2 |
| Производители | Уникальные коды (часто начинаются с Z) | U0126 – потеря связи с блоком ABS |
Ключевые преимущества диагностики через CAN:
- Высокая скорость передачи данных – коды считываются за секунды
- Одновременный доступ к ошибкам всех систем (двигатель, трансмиссия, ABS, подушки безопасности)
- Возможность чтения "замороженных" кадров (snapshot) – параметры датчиков в момент возникновения ошибки
После считывания коды интерпретируются по диагностическим картам производителя. Это позволяет точно локализовать неисправность, провести ремонт и стереть ошибки из памяти ЭБУ через CAN-интерфейс.
Конвертеры CAN в USB для ПК-диагностики
Конвертеры CAN-USB выполняют критическую роль в преобразовании цифровых сигналов CAN-шины в формат, понятный стандартным компьютерам через USB-интерфейс. Эти устройства оснащаются встроенными микроконтроллерами и изолирующими элементами для защиты от помех и скачков напряжения в бортовой сети автомобиля.
Без таких адаптеров прямое подключение ПК к CAN-шине невозможно из-за несовместимости электрических уровней и протоколов обмена данными. Конвертер обеспечивает физическое сопряжение и транслирует "сырые" CAN-кадры в битовый поток, обрабатываемый диагностическим ПО на компьютере.
Ключевые функции и применение
Основные задачи адаптеров:
- Чтение данных: Перехват и расшифровка параметров работы ЭБУ (обороты двигателя, температура, коды ошибок)
- Запись команд: Отправка диагностических запросов (сброс ошибок, калибровка датчиков, активация тестов)
- Мониторинг сети: Анализ нагрузки шины и обнаружение коллизий пакетов
Типовые сценарии использования:
- Диагностика неисправностей электронных систем (ABS, ESP, двигатель)
- Программирование блоков управления (прошивка, адаптация)
- Разработка и тестирование собственных CAN-устройств
- Снятие телеметрии в режиме реального времени
Критерии выбора адаптера
| Параметр | Значение | Влияние |
|---|---|---|
| Скорость передачи | До 1 Мбит/с | Определяет скорость обработки данных |
| Поддержка протоколов | CAN 2.0A/B, J1939, OBD-II | Совместимость с разными авто |
| Гальваническая развязка | 2-5 кВ | Защита ПК от скачков напряжения |
Современные адаптеры поддерживают функции двухканального мониторинга для одновременной работы с CAN High и CAN Low, а также интегрируют буферы FIFO для предотвращения потери пакетов при высокой нагрузке шины.
Анализаторы трафика CAN-шины
Анализаторы трафика CAN-шины (CAN-анализаторы) – это специализированные инструменты или программно-аппаратные комплексы, предназначенные для перехвата, декодирования, отображения и анализа данных, циркулирующих в CAN-сети. Они функционируют как "прослушивающие" устройства, подключенные к шине, и не оказывают влияния на её работу, обеспечивая пассивный мониторинг.
Основная задача анализаторов заключается в преобразовании "сырого" потока электрических сигналов и бинарных данных шины в понятный инженеру формат. Они идентифицируют CAN-кадры (стандартные и расширенные), извлекают идентификаторы (ID), данные (Data Field), проверяют контрольные суммы (CRC), фиксируют ошибки и измеряют временные параметры (задержки, частоту передачи).
Ключевые функции и возможности
Современные анализаторы трафика CAN предоставляют широкий спектр функций для диагностики и разработки:
- Декодирование протокола: Преобразование битов и байт в читаемые сообщения согласно спецификациям CAN (ISO 11898).
- Фильтрация и триггеры: Избирательный захват сообщений по ID, содержимому данных или специфическим событиям (ошибки, удаленные запросы).
- Отображение данных: Представление информации в различных форматах:
- Таблицы с полями кадров (ID, DLC, Data Bytes, Timestamp)
- Графики сигналов (извлеченных числовых значений из данных сообщений)
- Шестнадцатеричный/двоичный/десятичный вывод
- Статистика: Расчет нагрузки на шину, частоты появления сообщений, соотношения типов кадров.
- Запись и воспроизведение: Сохранение журнала трафика (лог-файл) для последующего анализа или моделирования условий.
- Поиск и декодирование протоколов верхнего уровня: Интерпретация данных в контексте специфических протоколов (J1939, CANopen, OBD-II и др.).
Области применения анализаторов:
- Диагностика неисправностей: Выявление ошибок связи (CRC, Bit Error, Form Error), конфликтов ID, перегрузки шины.
- Разработка и отладка ЭБУ: Верификация корректности отправки/приема сообщений новыми контроллерами, проверка временных характеристик.
- Реверс-инжиниринг: Анализ работы неизвестной системы для определения назначения сообщений и сигналов.
- Валидация и тестирование: Проверка соответствия работы сети техническим требованиям и стандартам.
- Мониторинг производительности: Оценка загрузки сети в реальных условиях эксплуатации.
Анализаторы трафика являются незаменимым инструментом для инженеров, работающих с CAN-сетями, обеспечивая глубокую видимость процессов взаимодействия между электронными компонентами системы.
Потенциальные угрозы: хакерские атаки через CAN
Открытость архитектуры CAN-шины, изначально спроектированной для внутреннего обмена данными в доверенной среде, делает её уязвимой для внешнего вмешательства. Физический доступ к шине или косвенные точки входа (например, диагностический разъём OBD-II, Bluetooth-модули, инфотейнмент-системы) позволяют злоумышленнику внедрять вредоносные кадры. Устаревшие протоколы безопасности (отсутствие шифрования, аутентификации и контроля целостности сообщений) упрощают перехват, модификацию или подмену данных.
Атаки могут осуществляться через подключение к OBD-порту, удалённое проникновение по беспроводным каналам (Wi-Fi, сотовые сети), либо через компрометацию периферийных ECU (например, мультимедийной системы). Злоумышленники способны отправлять фальшивые CAN-кадры с приоритетными идентификаторами, перехватывая управление шиной и подавляя легитимные сообщения от датчиков или блоков управления.
Основные виды атак и их последствия
- Перебор идентификаторов (Fuzzing): Массовая отправка случайных CAN-кадров для выявления уязвимостей в ECU и нарушения их работы.
- Подмена данных (Spoofing): Имитация сигналов критических систем (например, ложные показания скорости или давления в тормозной системе).
- DoS-атаки: Заполнение шины высокоприоритетными кадрами для блокировки передачи легитимных команд.
- Эксплуатация бэкдоров: Использование скрытых производителем функций для несанкционированного управления.
| Атака | Последствия | Примеры |
|---|---|---|
| Внедрение ложных команд | Отключение двигателя, блокировка тормозов, вмешательство в рулевое управление | Принудительная остановка на трассе |
| Чтение конфиденциальных данных | Кража параметров движения, геолокации, идентификаторов VIN | Мониторинг маршрутов, клонирование систем |
| Прошивка вредоносного ПО | Установка постоянного контроля или "троянов" | Скрытая активация функций после атаки |
Защита требует комплексного подхода: сегментация сети (шлюзы), внедрение протоколов с шифрованием (CAN-FD Sec, AUTOSAR SecOC), аппаратные системы обнаружения аномалий (IDS), а также регулярное обновление ПО ECU. Критически важные системы (торможение, управление двигателем) должны быть изолированы в отдельные подсети с усиленной аутентификацией сообщений.
Различия между CAN и LIN-шинами
CAN-шина предназначена для высокоскоростной передачи данных в критически важных системах (двигатель, трансмиссия, тормоза), обеспечивая надежную связь между электронными блоками управления (ЭБУ). LIN-шина служит для упрощенных задач в неответственных системах (регуляторы стекол, зеркала, подсветка), выступая как дополнение к CAN для удешевления реализации.
Скорость передачи CAN достигает 1 Мбит/с (обычно 500 кбит/с), что позволяет обрабатывать данные в реальном времени с минимальными задержками. LIN работает на скоростях до 20 кбит/с, что достаточно только для простых команд без жестких временных ограничений. Топология CAN поддерживает децентрализованную одноранговую сеть, где любой узел может инициировать передачу, а LIN использует строгую иерархию «ведущий-ведомый» с единственным мастер-контроллером.
Ключевые отличия в технических характеристиках
| Критерий | CAN | LIN |
|---|---|---|
| Скорость передачи | До 1 Мбит/с | До 20 кбит/с |
| Архитектура сети | Многоабонентская (multi-master) | Ведущий-ведомый (master-slave) |
| Количество узлов | До 110 (теоретически) | До 16 (включая ведущий) |
| Надежность | CRC, контроль битов, автоматический ретрансмиссия | Контроль четности, фиксированные форматы сообщений |
| Стоимость | Высокая (дорогие контроллеры) | Низкая (на базе UART) |
| Типовые применения | ABS, двигатель, подушки безопасности | Дворники, климат-контроль, кнопки управления |
Главное преимущество CAN – отказоустойчивость: механизмы обнаружения ошибок и приоритизации сообщений гарантируют работу в условиях помех. LIN, напротив, экономически выгоден для простых устройств благодаря использованию стандартных UART-модулей микроконтроллеров без дополнительных аппаратных затрат.
Электрическая реализация CAN требует витой пары с дифференциальными сигналами (CAN_H/CAN_L), что обеспечивает помехоустойчивость. LIN обходится однопроводной линией связи, что упрощает монтаж, но снижает устойчивость к электромагнитным воздействиям. Обе шины используют номинальное напряжение 12В, но логические уровни и протоколы арбитража кардинально различаются.
Сравнение пропускной способности CAN и Ethernet
Пропускная способность стандартной CAN-шины (ISO 11898-2) достигает 1 Мбит/с на сегментах длиной до 40 метров. При увеличении расстояния скорость падает: например, на 500 метрах она ограничена 125 Кбит/с. Для промышленных применений (CANopen) типичны скорости 250–500 Кбит/с. CAN FD (Flexible Data Rate) улучшает показатели до 5 Мбит/с в зоне данных, но сохраняет ограничения по длине физического слоя.
Ethernet обеспечивает базовую скорость 100 Мбит/с (Fast Ethernet) на расстояниях до 100 метров, а Gigabit Ethernet достигает 1 Гбит/с. Промышленные версии (Profinet, EtherCAT) поддерживают детерминированную передачу с пропускной способностью от 100 Мбит/с до 10 Гбит/с. Для сравнения: максимальная скорость CAN FD в 200 раз ниже минимальной скорости Fast Ethernet.
Ключевые отличия
| Параметр | CAN/CAN FD | Ethernet |
|---|---|---|
| Макс. скорость | 1 Мбит/с (CAN), 5 Мбит/с (CAN FD) | 10 Мбит/с – 10 Гбит/с+ |
| Влияние расстояния | Сильное снижение скорости (например, 125 Кбит/с на 500 м) | Незначительное снижение (100 м для 1 Гбит/с) |
| Типовые применения | Автоэлектроника, датчики, системы реального времени | Мультимедиа, IoT, промышленные сети, облачные сервисы |
Основные причины различий:
- Архитектура протокола: CAN использует последовательную шину с арбитражем (CSMA/CA), Ethernet – полнодуплексную коммутацию пакетов.
- Размер данных: CAN-кадр содержит до 64 байт (CAN FD), Ethernet – до 1500 байт (Jumbo-кадры – до 9000 байт).
- Детерминизм: CAN гарантирует время доставки за счёт приоритетов идентификаторов, Ethernet требует дополнительных механизмов (TSN, QoS).
Перспективы CAN XL для будущих высокоскоростных систем
CAN XL обеспечивает пропускную способность до 20 Мбит/с и поддерживает пакеты данных размером до 2048 байт, что в 64 раза превышает возможности CAN FD. Эта технология сохраняет обратную совместимость с существующими стандартами CAN и CAN FD через гибкие механизмы адаптации протокола, позволяя интегрировать её в гибридные сетевые архитектуры без полной замены оборудования.
Стандарт адресует растущие потребности в скорости для автономного вождения, систем дополненной реальности (HUD), обновлений ПО «по воздуху» (OTA) и многомодульных ECU. Благодаря детерминированной доставке данных и улучшенному управлению приоритетами, CAN XL становится ключевой инфраструктурой для централизованных вычислительных платформ следующего поколения (zonal/domain архитектур) в автомобилях, промышленной автоматизации и IoT.
Ключевые инновации CAN XL
- Гибридные сети: Шлюзование между CAN XL, CAN FD и Ethernet без потерь данных.
- Повышенная надёжность: Контроль целостности данных (CRC) на уровне пакетов и фреймов.
- Адаптивное управление потоком: Динамическое распределение полосы пропускания для критичных систем.
| Параметр | CAN | CAN FD | CAN XL |
|---|---|---|---|
| Макс. скорость | 1 Мбит/с | 5 Мбит/с | 20 Мбит/с |
| Размер полезной нагрузки | 8 байт | 64 байта | 2048 байт |
| Сферы внедрения | Базовые датчики | ADAS, двигатели | Автономное вождение, OTA, HD-карты |
Список источников
При подготовке материала о CAN-шине использовались авторитетные технические документы, отраслевые стандарты и специализированные публикации. Основное внимание уделялось источникам, раскрывающим принципы работы, архитектуру и практическое применение технологии в современных системах.
Ключевыми источниками выступили международные стандарты, учебные пособия по автомобильной электронике и техническая документация от производителей компонентов. Особое значение придавалось актуальным материалам, отражающим современные реализации CAN в промышленности и транспортных средствах.
Литература и нормативные документы
- ГОСТ Р ИСО 11898-1-2019 "Дорожные транспортные средства. Сетевое взаимодействие контроллеров"
- SAE J1939 Standards Collection (Society of Automotive Engineers)
- Босх Р. "Автомобильная электроника" (разделы о сетевых протоколах)
- Материалы технических комитетов ISO TC 22/SC 31
- Учебное пособие "Автомобильные шины данных" (МГТУ им. Н.Э. Баумана)
- Документация CAN Specification 2.0 (Robert Bosch GmbH)
- Публикации IEEE по распределенным системам управления
- Технические отчеты NXP Semiconductors "CAN Bus Primer"
- Статьи в журнале "Электронные компоненты" (российские реализации CAN)
- Руководства Vector Informatik GmbH по диагностике CAN-сетей